Ciencia
Nuzi
Nuzi
El mapa cartográfico más antiguo de la historia (2300 AC)
Nuzi: Entidad subnacional
Coordenadas: 35°18′09″N 44°14′51″E
Entidad: Ciudad y Yacimiento arqueológico
Situación de Nuzi.
Nuzi (o Nuzu; en acadio: Gasur; hoy, Yorghan Tepe) era una ciudad de Mesopotamia situada al sudoeste de Kirkuk en el actual Irak, cerca del río Tigris.
Historia
Primeros años
Las primeras menciones de esta ciudad, se encuentran en textos cuneiformes provenientes de Mesopotamia, correspondientes al período Acadio. En estas inscripciones, es mencionada como Gasur (Ga Sur).
Dominio hurrita-mitanio
En 1500 a. C., fue ocupada por los hurritas, quienes le dieron a la ciudad el nombre de Nuzu, de donde deriva el término Nuzi. Desde el siglo XV a. C., y hasta 1350 a. C. aproximadamente, pasó al dominio del reino hurrita de Mitani, constituyendo el punto extremo este y límite sudoriental del reino.
Dominación asiria

Hacia 1365 a. C., con el comienzo del reinado de Ashur-uballit I, Asiria ve el comienzo de la llamada expansión Mesoasiria, que comienza cuando esta se libera de la dominación de sus vecinos, los mitanios. Tras la caída del Imperio Mitanita ante las fuerzas del ejército asirio, Nuzi, pasa al dominio de Asiria.
Historia arqueológica
Ofrenda de terracota en forma de casa. Harvard Museum of the Ancient Near East, Cambridge (Massachusetts).
Esquema explicativo, en francés, del Mapa de Nuzi, el mapa geográfico más antiguo conocido. Sobre tablilla de arcilla sumeria (c. 2500 a. C.). Harvard Museum of the Ancient Near East.
El yacimiento consta de un tell de múltiples períodos de tamaño medio y dos pequeños montículos de un único período.
Las excavaciones llevadas a cabo en 1920 desenterraron no solo la ciudad, sino también millares de tablillas escritas en cuneiforme. Son alrededor de 5000 tablillas, muchas de ellas, de tipo legal y comercial, y aproximadamente una cuarta parte se refieren a transacciones comerciales de una sola familia.1 La gran mayoría de estos hallazgos son del período hurrita durante el II milenio a. C. y el resto se remonta a la fundación de la ciudad durante el Imperio acadio. Un archivo contemporáneo al archivo hurrita en Nuzi ha sido excavado en el ‘Palacio Verde’ en el sitio de Tell al-Fajar, 35 kilómetros al suroeste de Nuzi.2
Esto dio una luz inestimable a los investigadores en cuanto a las actividades legales, comerciales y militares de la ciudad. También ayudó a comprender la cultura del Antiguo Oriente Próximo, incluyendo versiones primitivas de las historias de personajes bíblicos como Labán o Jacob.
Se encontraron múltiples objetos de la Edad del Bronce Final y se identificó por primera vez un tipo de cerámica común en el norte de Mesopotamia durante el período del reino de Mitanni, la denominada “cerámica de Nuzi”, caracterizada por una decoración pintada en blanco sobre un fondo oscuro.3 Los motivos suelen ser geométricos (triángulos, bandas), curvilíneos (rosetas, volutas) o florales. También se han encontrado objetos que muestran el desarrollo de la técnica de vidriado-esmaltado, marcando el inicio de la producción de objetos de vidrio: ladrillos esmaltados, fritas, ‘fayenzas‘ (de vidrio coloreado). Y otros objetos como armas de metal, estatuillas de terracota y representaciones de edificios.
Quizás el objeto más famoso encontrado hasta el momento es el mapa de Nuzi, considerado el mapa descubierto más antiguo conocido.
De: http://tochoocho.blogspot.com/2012/01/el-mapa-cartografico-mas-antiguo-de-la.html
En 1931, cerca de la ciudad de Kirkuk, en el norte de Iraq, se halló el que por ahora es el mapa más antiguo de la historia, trazado sobre una tablilla de barro, fechado entre el 2500 y el 2300 aC (Semitic Museum, Harvard University, Cambridge, Mass., SMN 4172).
Aunque no se ha identificado con precisión el lugar, todo apunta a que representa un territorio concreto cerca de la ciudad de Gasur, más tarde conocida como Nuzi.
La tablilla muestra varios brazos de un río o varios canales. Circulan por un valle entre montañas (lo que asegura que la zona cartografiada pertenece al norte, y no al sur de Mesopotamia). Indica varias poblaciones; los nombres son de difícil o imposible lectura, salvo el que se halla en un círculo en el margen inferior izquierdo, donde se logra leer (los signos mas2 -en forma de cruz: borde, límite-, dur -asentamiento- e ibla -cinturón, defensa-, se reconocen): Mashkan-dur-ibla, una población no hallada hasta ahora; quizá un bastión o una plaza fuerte.
En el centro de la tablilla se indica una superficie: 20 bur, 1 eshe, unas quince hectáreas, y el nombre del propietario: Azala.
El mapa está orientado: se indican, como era habitual en la planimetría mesopotámica, los nombres de los vientos del este (en la parte superior izquierda), oeste (abajo) y norte (izquierda). El nombre del viento sureño está borrado.
Es probable que el curso se dirigiera del norte al sureste. No se sabe si se trata de un río con afluentes, canales, o un conjunto de afluentes de un río mayor no dibujado por estar fuera del marco.
Las montañas se representan mediante una franja compuesta por un mosaico de pequeñas semi-circunferencias (o parábolas).
Se descubre que en el tercer milenio no se distinguía entre representación naturalista y esquemática o sígnica, como tampoco se distinguía entre planta y alzado en algunas ocasiones: se trata de un mapa, por tanto de una proyección ortogonal. Los cursos fluviales están plasmados horizontalmente, y se reconocen bien las convenciones gráficas que permiten distinguir ríos y caminos. Sin embargo, el tipo de convención para representar una cadena montañosa era la misma en un relieve en un sello-cilindro (una representación de frente o en alzado) y en un relieve esculpido (es decir, en una representación que hoy cualificaríamos de “artística”): en los tres casos, las montañas son representadas mediante una convención gráfica.
Pero salvo esta ambigüedad, todos los elementos de una representación cartográfica precisa utilizados aún hoy ya están presentes: un mapa tiene que estar orientado, y se tienen que emplear unos códigos para distinguir los distintos hitos naturales. La línea o el contorno es el elemento gráfico principal, y todas las formas se representan en proyección, casi siempre horizontal.
Mapa estelar sumerio
La Tabla SUMERIA de hace 5000 mil años resulta ser un Mapa Estelar
En Nínive, capital de la antigua asiria, lo que hoy es Irak, se halló hace unos 150 años, una tablilla circular hecha de arcilla de 140 mm de diámetro. La tablilla muestra los dibujos de constelaciones y pictogramas basados en texto conocido como escritura cuneiforme, que fue utilizado por los sumerios, la primera civilización conocida en el mundo.
Inicialmente se pensaba que era una tableta asiria, pero un análisis informático ha emparejado con el cielo por encima de Mesopotamia en el año 3300 aC.
LA TABLA SUMERIA de hace 5000 MIL AÑOS resulta ser un Mapa Estelar de la Antigua Nínive, 3300 AC Tableta Circular de piedra de fundición, de 140 mm de diámetro (aproximadamente 5.5 pulgadas), pálido ocre terracota, con el negro de madera soporte de exhibición del museo y la descripción de pergamino. Reproducción de un arcaico mapa estelar o” planisferio” sumerio recuperado del 650 aC, de la biblioteca subterránea del rey Asurbanipal en Nínive, Iraq en el siglo XIX. Inicialmente se pensaba que era una tableta asiria, pero un análisis informático ha emparejado con el cielo por encima de Mesopotamia en el año 3300 AC y demuestra que es de origen sumerio mucho más antiguo.
La tableta es un “Astrolabio”, el instrumento astronómico más antiguo conocido. Se trata de un mapa de las estrellas segmentado, en forma de disco con las unidades marcadas de medida del ángulo inscrito sobre la llanta.
Desafortunadamente partes considerables del planisferio de esta tableta faltan (aproximadamente 40 %), el daño que data del saqueo de Nínive. El reverso de la tableta no está inscrito. Aún está en estudio por los eruditos modernos, el planisferio proporciona pruebas extraordinarias para la existencia de la astronomía sumeria. Las líneas que irradian desde el centro definen ocho sectores estelares de 45 grados cada uno. Figuras de estrellas se encuentran en seis de estos sectores.
Figuras de estrellas se encuentran en seis de estos sectores. “Los nombres de Dios” se utilizan para indicar Orión y la Vía Láctea, además de los nombres de las estrellas/constelaciones sumerios conocidos. Los ocho sectores incluyen constelaciones representadas además de ser escrito, junto con los nombres de estrella y sus símbolos concomitantes. Las secciones intactas muestran texto cuneiforme de nombres particulares las estrellas y constelaciones, así como los puntos y diagramas, como flechas, triángulos, líneas de intersección y de una elipse, que comprenden dibujos esquemáticos de seis estrellas y constelaciones. Las constelaciones representadas en cada sector se dibujan como puntos que representan estrellas, conectados por líneas. Figuras de las constelaciones son identificables en los seis sectores en buen estado.
Las estrellas y las constelaciones que se muestran son identificados como: (1) Piscis (2) no se identifica (3) Sirius (Flecha) (4) Pegaso y Andrómeda Campo y Plough) (5) no se identifica (6) Pleiades (7) Géminis (8) Hydra, Corvus y Virgo. Así, el mapa de las estrellas circular divide el cielo nocturno en ocho sectores e ilustra las constelaciones más prominentes y su dirección de movimiento. En 2008 dos autores, Alan Bond y Mark Hempsell publicó un libro sobre la tableta llamada “Un Observación Sumeria del evento de impacto los Köfels.” El aumento de una tormenta en los círculos arqueológicos, volvieron a traducir el texto cuneiforme y afirman la tableta registra un impacto de asteroide antiguo, Impacto de los KFELS‘, que golpeó Austria algún momento alrededor de 3100 AC.
“Los nombres de Dios” se utilizan para indicar Orión y la Vía Láctea, además de los nombres de las estrellas y constelaciones sumerios conocidos. Los ocho sectores incluyen constelaciones representadas además de ser escrito, junto con los nombres de estrella y sus símbolos concomitantes.
Las secciones intactas muestran texto cuneiforme de nombres particulares las estrellas y constelaciones, así como los puntos y diagramas, como flechas, triángulos, líneas de intersección y de una elipse, que comprenden dibujos esquemáticos de seis estrellas y constelaciones. Las constelaciones representadas en cada sector se dibujan como puntos que representan estrellas, conectados por líneas.
Durante décadas los científicos no han podido descifrar el contenido. En el 2008 dos científicos, Alan Bond y Mark Hempesell de la Universidad de Bristol, finalmente descifraron el código de caracteres cuneiformes. Mediante el uso de un programa de computadora que puede reconstruir el cielo de la noche de hace miles de años.

Los dos científicos fueron capaces de establecer que la tablilla es un bloc de notas de los astrónomos Sumerios y se refiere a los acontecimientos en el cielo antes del amanecer el 29 de junio de 3123 AC. Lo que hace sorprendente a este descubrimiento es que muestra a un gran objeto viajando a través de la constelación de piscis, lo que probablemente fue un asteroide que impacto en la Tierra.
Según la trayectoria este debió caer en la zona de Kofels, Austria, pero no hay señales de impacto, así que se presume que este se haya desintegrado al entrar en la atmósfera.
Se conserva también un planisferio posterior. Fue encontrado en Nínive, la capital asiria, y pertenece al reinado del rey Asurbanipal (668-626 a.C.).
El planisferio asirio es posterior (683 a.C.)
https://mysteriesrunsolved.com/es/2020/09/the-sumerian-planisphere-star-map.html
El objeto se encuentra en el Museo Británico y está catalogado como el artefacto No. K8538, y se trata efectivamente de un antiguo mapa estelar.
Limes Nórico
Limes Nórico
Fue creado en la época de Claudio con sede en Virunum, estaba compuesto de fortalezas y torres de vigilancia a lo largo del río como Boiodurum, Stanacum, Lentia, Locus Felicis, Arelape, Faviana, Astura y Commagena, en un principio era una provincia Procuratie, su vigilancia era llevada a cabo sólo por tropas auxiliares. Las primeras estructuras eran sencillas de madera y tierra que se convirtieron sistemáticamente bajo el emperador Adriano en fortalezas de piedra. Tras la invasión de los marcómanos en 167-168, la provincia fue reformada por Marco Aurelio alrededor de 175 estacionando la nueva legión II Itálica en Lauriacum (actual Enns), que se convirtió en la nueva capital de la provincia.
Algunos acuartelamientos tenían su propio puerto fluvial o embarcadero y un área de almacenamiento porque el Danubio no sólo era la zona fronteriza, sino también la ruta de transporte y comercio más importante de la región. Con el tiempo se establecieron asentamientos civiles o vici al lado de los campamentos o incluso en el interior, fundando ciudades o municipios que eran los centros administrativos o comerciales de la región.

Esta sección de las limas existió desde el siglo I al V d.C. y custodiaba parte de la provincia romana de Noricum.
Está en el suelo de los actuales estados austriacos de Alta y Baja Austria. Corría a lo largo del Danubio desde Passau/Boiodurum hasta Zeiselmauer/Cannabiaca. Esta es también una ripa (borde del río), que estaba custodiada por una cadena suelta de fuertes de cohorte. La carretera principal de Norican Limes era la via iuxta amnem Danuvium. Las estructuras inicialmente simples de madera y tierra se convirtieron sistemáticamente bajo el emperador Adriano, en campamentos de piedra. Durante el siglo IV, se actualizaron una vez más y se reforzaron masivamente. Entre los campamentos, en lugares estratégicos o buenos puntos de observación, se encontraban torres de vigilancia o torres de señales y, en la Antigüedad tardía, burgi. En la sección central, entre los campamentos de Favianis y Melk, las torres de vigilancia se construyeron solo esporádicamente. Aquí, el estrecho valle del Wachau, con sus escarpes densamente boscosos, dificultaba el acceso a la orilla del río, proporcionando alguna función defensiva. Cada campamento tenía su propio puerto fluvial o embarcadero y un área de almacenamiento porque el Danubio no solo era una zona fronteriza, sino también la ruta de transporte y comercio más importante de la región. Con el tiempo, asentamientos civiles ovici se establecieron inmediatamente al lado de los campamentos. En el interior inmediato de las limas, se fundaron ciudades amuralladas o municipia, por ejemplo, Aelium Cetium u Ovilava (Wels). Eran los centros administrativos o comerciales de la región. En la antigüedad tardía, el área noricana se dividió en dos partes (pars inferior y pars superior).[11] Es probable que se creara una segunda línea defensiva en la retaguardia (Castrum Locus Felicis).
Las tropas de ocupación, Exercitus Noricus, estaban formadas principalmente por cohortes auxiliares y una legión estacionada en Lauriacum/Enns actuó como reserva estratégica. La vigilancia y seguridad del Danubio y sus afluentes eran responsabilidad del Classis Pannonia. Unidades de las legiones, fuerzas navales y auxiliares fueron comandadas por los respectivos gobernadores. En la antigüedad tardía, según Notitia Dignitatum, cuatro flotillas de nueva creación emprendieron esta tarea. Desde el siglo III, los norianos comitatenses, ripenses y liburnari estaban bajo el mando de dos generales:
- viene de Illyria
- Líder de Hungría Primaria y Norici Ripensis
Antes de la conquista romana
Noricum fue poblado a finales de la Edad del Hierro por la cultura Hallstatt. Hacia mediados del siglo IV a.C. una primera oleada de pueblos celtas invadió Noricum, trayendo consigo nuevas tradiciones (cultura La Tène), que en los siglos siguientes fueron absorbidas por los pueblos indígenas. Los estudios prehistóricos y lingüísticos de la región han destacado tres componentes diferentes: los Veneti en la parte suroeste de Norico, con las tribus Laiancie de los Saevates; los ilirios en la parte sureste, como una propagación de las poblaciones ilirias de pannoni y dálmatas; los celtas en la parte norte, identificables con los taurisci o norici como sugiere Plinio el Viejo, y en la parte sur con los carni. Los celtas durante los siguientes tres siglos ocuparon gradualmente toda el área nori, comenzando desde el valle del Danubio, para luego viajar por los valles alpinos hasta Carintia (en la segunda mitad del siglo III aC), y luego hacia el este, expulsando a las tribus ilirias que se encontraban en esta zona. Fundaron numerosas ciudades, que aún conservaban el sufijo celta en época romana, como Boiodurum, Stanacum, Joviacum, Lauriacum, Juvavum, Ovilava, etc.
Norici o Taurisci: aliados de los romanos
El primer encuentro entre los habitantes de esta región y los romanos tuvo lugar en el año 183 a.C., cuando algunas bandas de taurisci habían decidido emigrar al norte de Italia, más precisamente a Friuli, en la zona donde se habría levantado Aquileia un par de años después. Tenían la intención de fundar su nuevo oppidum. Sin embargo, Roma, que no quería la interferencia en suelo italiano de otros pueblos, decidió intervenir construyéndola en 181 a. C. una nueva colonia para proteger sus fronteras del norte (de hecho, Aquileia). Así fue como los tauriscos se vieron obligados a regresar a sus tierras, manteniendo una relación amistosa con los “nuevos vecinos” romanos. Prueba de ello es la solicitud de intervención armada romana, tras la invasión de Cimbri y Teutoni, con el posterior enfrentamiento en la ciudad nórdica de Noreia en 113 a. C. Se convirtió en protectorado romano a finales del siglo II a.C., desarrollando una cultura marcadamente romanizada (como se puede ver en las leyendas latinas en las monedas y otras inscripciones) que llevó a la anexión en el 16 a.C., por un tal Publio Silio Nerva. , de la única parte sur de los territorios, donde existían numerosas y productivas minas de oro descubiertas un siglo y medio antes (norte de Carintia).
La provincia de Noricum
La nueva provincia, creada en tiempos de Claudio y puesta bajo la autoridad de un procurador augusto, con sede en Virunum, era una provincia de procuraduría, cuyo ejército estaba formado únicamente por tropas auxiliares. La provincia de Noricum también tenía el propósito de defender las fronteras imperiales de las limas del Danubio y las limas nórdicas. De esta forma, se iniciaron importantes procesos de construcción de fuertes, fortines y torres de vigilancia militares a lo largo de toda la frontera: en Boiodurum, Stanacum, Lentia, Locus Felicis, Arelape, Faviana, Astura y Commagena. Tras la invasión de los marcomanos en 167-168 d. C., la provincia fue reformada por Marco Aurelio alrededor del 175 d. C. y fue puesto bajo un legatus Augusti pro praetore, a quien se le confió el mando de la nueva legión, la II Itálica, asignada a Lauriacum (la actual Enns)
Vyzov primera película en el espacio
Vyzov primera película en el espacio
La primera actriz y el primer director de cine en el espacio
Lanzamiento y acoplamiento de la Soyuz MS-19
05 Octubre 2021

La corporación estatal Roscosmos ha lanzado hoy día 5 de octubre de 2021 a las 08:55 UTC un cohete Soyuz-2.1a desde la rampa PU-6 del Área 31 del cosmódromo de Baikonur con la nave Soyuz MS-19 (nº 749). A bordo viajaban Antón Shkáplerov (comandante), Yulia Peresild y Klim Shipenko.
Los tres forman parte de la misión Vyzov (вызов, ‘desafío’), que pretende rodar la primera película en órbita. Yulia Peresild se ha convertido en la primera actriz en viajar al espacio y Klim Shipenko en el primer director de cine profesional en hacer lo propio.
La Soyuz MS-19 se acopló con el módulo Rassvet del segmento ruso de la ISS a las 12:22 UTC, después de dos órbitas. Dentro de la estación les esperaban Thomas Pesquet (Francia), Akihiko Hoshide (Japón), Shane Kimbrough, Megan McArthur, Mark Vande Hei (EEUU), Oleg Novitsky y Piotr Dubrov (Rusia), miembros de la Expedición 65 de la ISS.
Lanzamiento de la Soyuz MS-19 (Roscosmos).
Shkáplerov, el único cosmonauta profesional de la Soyuz MS-19, ha pasado a formar parte de la Expedición 65. Shkáplerov regresará en la Soyuz MS-19 el próximo 28 de marzo junto con Dubrov y Vande Hei, mientras que Peresild y Shipenko volverán en la Soyuz MS-18 junto con Oleg Novitsky el 17 de octubre después de una breve estancia en la estación.
La Soyuz MS-19 es la primera Soyuz con una tripulación totalmente rusa desde la Soyuz TM-30 en 2000 y la primera con tres cosmonautas rusos desde la Soyuz TM-28 en 1998. Peresild es además la segunda mujer rusa en la ISS tras Yelena Serova y solamente la quinta mujer soviética o rusa en alcanzar la órbita. No deja de ser una paradoja que Peresild haya alcanzado el espacio antes que Anna Kíkina, cosmonauta profesiona l de Roscosmos.
l de Roscosmos.
Peresild, Shkáplerov y Shipenko (Roscosmos).
Para Antón Niloáievich Shkáplerov (Антон Николаевич Шкаплеров, 1972, 49 años) este es su cuarto vuelo espacial después de las misiones Soyuz TMA-22, TMA-15M y MS-07. Ingeniero y piloto, Shkáplerov fue seleccionado como candidato a cosmonauta en 2003.
Para Peresild y Shipenko, esta es su primera misión espacial. Yulia Sergueievna Peresild (Юлия Сергеевна Пересильд, 1984, 37 años) es una actriz que ha sido merecedora de varios galardones, entre ellos el premio Artista de Honor de la Federación Rusa de 2018. Klim Alexéievich Shipenko (Клим Алексеевич Шипенко, 1983, 38 años) es un guionista, productor y director de cine. Entre las películas dirigidas por Shipenko se encuentra la famosa Salyut 7 (2017), un film de acción espacial que ha tenido bastante éxito fuera de Rusia. La tripulación de reserva estaba formada por Oleg Artemyev (Roscosmos), Alexéi Dudin (cámara) y Aliona Mordovina (actriz).

Resumen de la misión (Roscosmos).
Shipenko y Peresild deben rodar escenas para la película Vyzov, una producción cuyo guion pivota alrededor de una mujer que debe entrenarse rápidamente para volar a la ISS y resolver una emergencia. La idea de lanzar una actriz y un director rusos para grabar una película en el espacio surgió como respuesta a la noticia de que el actor Tom Cruise y el director Doug Liman pretendían volar a la ISS en una Crew Dragon, una iniciativa que fue respaldada por la propia NASA (y que actualmente está en el aire). A raíz de este anuncio, Dmitri Rogozin, jefe de Roscosmos, decidió adelantarse apoyando una iniciativa similar, pero con un actor ruso. El proyecto Vyzov fue oficialmente anunciado en septiembre de 2020 por los organizadores: Roscosmos, el canal de televisión ruso Pervy Kanal y el estudio Yellow, Black and White.
En noviembre se anunció que, por «exigencias del guion», la protagonista sería una actriz. También se decidió que esta actriz sería elegida mediante un concurso. Tras recibir cerca de tres mil solicitudes, se seleccionaron veinte candidatas. Al mismo tiempo, se hizo público que el director de la película sería Klim Shipenko y que uno de los cámaras, Alexéi Dudin, sería su suplente. Un mes antes del despegue se emitió el entrenamiento de la tripulación en formato reality show a través del Pervy Kanal.

La Soyuz MS-19 en el edificio MIK-KA en el Área 254 de Baikonur (junto con otras Soyuz y Progress) y conexión con el segmento PkhO:


Entrenamiento en la Soyuz:

Entrenamiento en el módulo orbital (BO) de la Soyuz:
Traslado de la Soyuz al MIK-112:

La tripulación se dirige a la rampa:


La Soyuz sobre Baleares:
La tripulación llega a la ISS:
La entrada Lanzamiento y acoplamiento de la Soyuz MS-19: la primera actriz y el primer director de cine en el espacio fue escrita en Eureka.
Soyuz MS-19
Nombres: ISS 65S
Tipo de misión: Misión tripulada a la ISS
Operador: Roscosmos; ID COSPAR; 2021-089A
ID NSSDCA: 2021-089A
Duración de la misión: ~180 días (planeada), 13 horas, 39 minutos (en progreso)
Propiedades de la nave
Nave: Soyuz MS
Tipo de nave: Soyuz MS 11F732A48
Fabricante: S. P. Korolev Rocket and Space Corporation Energia
Tripulación: 3 Miembros
Indicativo: Астрей
Comienzo de la misión
Lanzamiento: 5 de octubre de 2021, 08:55:02 UTC1
Vehículo: Soyuz 2.1a
Lugar: Baikonur, Sitio 31/6
Contratista: Centro Espacial de Cohetes Progress
Fin de la misión
Aterrizaje: 28 de marzo de 2022 (planeada)2
Lugar: Estepa kazaja, Kazajistán
Parámetros orbitales
Sistema de referencia: Órbita geocéntrica
Régimen: Órbita terrestre baja
Inclinación: 51.66°
Acople con ISS
Puerto de acople: Rassvet nadir
Fecha de acople: 5 de octubre de 2021, 12:22:31 UTC
Tiempo acoplado: 180 días (planeado) 10 horas, 12 minutos (en progreso)
Soyuz MS-19 es una misión de la nave Soyuz planeado para ser lanzado el 5 de octubre de 2021 a las 08:55:02 UTC.1 La Soyuz MS-19 será el vuelo 147 de una cápsula Soyuz tripulada. La tripulación consistirá en un comandante ruso, el director de cine Klim Shipenko y la actriz rusa Yuliya Peresild.3 Se planea que Shipenko y Peresild estén una semana en la ISS antes de volver a la Tierra a bordo de la Soyuz MS-18, con la intención de grabar en el espacio la película Vyzov (en ruso, Вызов, lit. ‘El Reto’).4
Expansión del Segmento Orbital Ruso
Recreación en 3D del Segmento Orbital Ruso tras el acople del Nauka.
La tripulación de la Soyuz MS-18 llegará en abril de 2021, antes del lanzamiento y acople del Nauka el 15 de julio de 2021.6 El módulo Prichal será lanzado a la Estación Espacial Internacional en noviembre de 2021 con la Progress M-UM.
El manifiesto de vuelo de la ISS propuesto por Roscosmos el 4 de febrero de 2021 situaba el lanzamiento del Prichal en noviembre de 2021 y el acople al puerto nadir de Nauka dos días después.7 Uno de los puertos del Prichal está equipado con un puerto de acople híbrido activo, que permite el acople con el módulo Nauka/MLM. Los cinco puertos restantes son híbridos pasivos, permitiendo el acople de naves Soyuz y Progress, así como módulos más pesados o naves futuras con sistemas de acople modificados.8
Está planeada la realización de un paseo espacial por parte de la tripulación de la Soyuz MS-18, tras la llegada del módulo Prichal a la estación espacial. Este paseo espacial se centrará en la configuración inicial del módulo.8
El Prichal será la segunda ampliación del Segmento Orbital Ruso (ROS) en el 2021.
La nave Soyuz MS-18 fue reubicada en la ISS para dejar sitio a la Soyuz MS-19

The Soyuz MS-19 crew with (from left) Roscosmos cosmonaut Anton Shkaplerov, producer Klim Shipenko and actress Yulia Peresild.
–Un cohete Soyuz MS-19 partió este martes desde el cosmódromo de Baikonur (Kazajistán) hacia la Estación Espacial Internacional (EEI) llevando a bordo al cosmonauta de la Agencia Espacial Rusa Antón Shkaplerov y a un equipo de rodaje formado por el director Klim Shipenko y la actriz Yúlia Peresíld, para filmar la primera película en el espacio, titulada Výzov (‘desafío’, en ruso).
El equipo de la mini película tiene doce días para el rodaje. La película trata de un médico que debe tratar a un cosmonauta cuyo estado es demasiado grave para un vuelo de regreso a la Tierra.
La película contará la historia de una doctora que debido a las circunstancias tendrá que ir al espacio para salvar la vida de un cosmonauta. El rodaje se llevará a cabo no solo en la EEI, sino también en Baikonur y la nave espacial Souyz MS-19.
A finales de septiembre de 2020, Roskosmos anunció su intención de enviar a la EEI un equipo para rodar el primer largometraje en el espacio. En mayo de 2021 la Comisión Estatal dio a conocer los resultados de la selección de los candidatos, y Shipenko y Peresild empezaron el proceso preparatorio para viajar al cosmos.
«En un marco de tiempo tan ajustado, pudimos entender, sentir, aprender, […] hemos recorrido un camino difícil tanto física como psicológicamente», confesó la actriz rusa al comentar las tareas de preparación para el viaje. Por su parte, Shipenko, antes de superar las últimas pruebas, bromeó diciendo que en el proceso de preparación le «exprimieron todo el jugo». Muestra de ello es que durante los entrenamientos el director perdió 15 kilos. Por fin, el pasado sábado Shipenko y Peresild
El presupuesto del rodaje se mantiene en secreto. La agencia espacial rusa Roskosmos había anunciado el proyecto justo después de que la NASA informara de los planes de rodar en la EEI con la estrella de Hollywood Tom Cruise para la serie de películas de acción «Misión Imposible».
«Es un experimento», dijo el director de la película, Klim Shipenko. «No tengo a nadie a quien pedir consejo. No tengo ningún camarógrafo que me pregunte cómo filmar con la luz de la ventana», añadió en una rueda de prensa.
La actriz Yulia Peressild, que se sometió a un riguroso entrenamiento con el director para acostumbrarse a la ingravidez, dijo el lunes que la actuación y los cosmonautas eran «dos cosas opuestas». «Veremos si puedo combinar las dos cosas», añadió.
Peresild y Shipenko pasarán 12 días en el espacio, durante los cuales el director planea filmar unos 40 minutos de tiempo de pantalla. Peresild y Shipenko regresarán a la Tierra el próximo 17 de octubre en la nave espacial Soyuz MS-18 junto con el cosmonauta Oleg Novitski. (Información RT, DW y POCKOCMOC).
Vyzov, la primera película en órbita
Termina el rodaje, y regresan los actores y componentes.
Monday 18 Octubre 2021
La cápsula (SA) de la Soyuz MS-18 (nº 748) aterrizó hoy 17 de octubre de 2021 a las 04:35 UTC cerca de Zhezkazgán (Kazajistán). A bordo viajaban Oleg Novitsky, Klim Shipenko y Yulia Peresild. Termina así la misión Vyzov (Вызов), destinada a grabar la primera película en el espacio. El director Klim Shipenko y la actriz Yulia Peresild han estado en el espacio un total doce días después de despegar el pasado 5 de octubre a bordo de la Soyuz MS-19. Por contra, Oleg Novitsky, que despegó con la Soyuz MS-18 el 9 de abril, ha estado en el espacio 191 días en el transcurso de esta misión (y ya acumula 531 días a lo largo de su carrera como cosmonauta). Shipenko y Peresild viajaron originalmente con Antón Shkláperov, que se ha quedado en la estación espacial y regresará el próximo 28 de marzo de 2022 en la MS-19 junto con Piotr Dubrov y Mark Vande Hei.
La Soyuz MS-18 se había separado previamente del módulo Nauka del segmento ruso de la ISS el 17 de octubre a las 01:14 UTC. El motor del PAO de la Soyuz se encendió a las 03:41 UTC durante 279 segundos para llevar a cabo la ignición de frenado y los tres módulos de la nave (PAO, SA y BO) se separaron a las 04:09 UTC. La cápsula entró en la atmósfera terrestre a las 04:12 UTC y el paracaídas se abrió a las 04:20 UTC.. La partida de la Soyuz MS-18 dio por finalizada de forma oficial la Expedición 65 de la ISS. La Expedición 66 está formada por las tripulaciones de la Soyuz MS-19 y la Dragon Crew-3: Antón Shkláperov, Piotr Dubrov, Megan McArthur, Shane Kimbrough, Mark Vande Hei, Aki Hoshide y Thomas Pesquet. El francés Pesquet se ha convertido en el comandante de la estación y de la Expedición 66. Precisamente, Dubrov y Vande Hei debían haber regresado originalmente en la MS-18, pero el proyecto Vyzov ha provocado que su estancia en la ISS se alargue significativamente. Los dos hombres regresarán después de estar un año en el espacio, batiendo el récord de permanencia en la ISS (en la estación Mir los cosmonautas Musa Manarov y Vladímir Titov estuvieron un año, mientras que Valeri Polyakov permaneció 14 meses; sin embargo, nadie ha estado tanto tiempo a bordo  de la ISS).
de la ISS).
La tripulación de regreso de la Soyuz MS-18 (NASA).
Shkáplerov, Dubrov, Peresild, Shipenko y Novitsky (Roscosmos).
La película Vyzov («desafío» en ruso) es una coproducción entre Roscosmos, el canal de televisión ruso Pervy Kanal y la empresa Yellow, Black and White Studio y trata sobre una mujer —interpretada por  Peresild— que debe realizar un viaje de emergencia a la ISS para operar a un cosmonauta —interpretado por Novitsky—. El director Klim Shipenko también se encargó del maquillaje, la cámara y el sonido durante las grabaciones en órbita (con toda seguridad que el producto final será más realista que su famosa producción Salyut 7, aunque quizás no tan entretenida). Shipenko y Peresild se han convertido en el primer director profesional y la primera actriz en órbita respectivamente, aunque, paradójicamente, durante su estancia el actor William Shatner viajó por encima de la línea Kármán en la misión suborbital NS-18 del New Shepard. Por su parte, Peresild es la quinta mujer rusa en alcanzar la órbita tras Valentina Tereshkova, Svetlana Savítskaya, Yelena Kondakova y Yelena Serova. Durante su estancia en la estación —esta ha sido su tercera misión espacial—, Oleg Novitsky ha realizado tres paseos espaciales.
Peresild— que debe realizar un viaje de emergencia a la ISS para operar a un cosmonauta —interpretado por Novitsky—. El director Klim Shipenko también se encargó del maquillaje, la cámara y el sonido durante las grabaciones en órbita (con toda seguridad que el producto final será más realista que su famosa producción Salyut 7, aunque quizás no tan entretenida). Shipenko y Peresild se han convertido en el primer director profesional y la primera actriz en órbita respectivamente, aunque, paradójicamente, durante su estancia el actor William Shatner viajó por encima de la línea Kármán en la misión suborbital NS-18 del New Shepard. Por su parte, Peresild es la quinta mujer rusa en alcanzar la órbita tras Valentina Tereshkova, Svetlana Savítskaya, Yelena Kondakova y Yelena Serova. Durante su estancia en la estación —esta ha sido su tercera misión espacial—, Oleg Novitsky ha realizado tres paseos espaciales.
Peresild en el módulo Nauka (Roscosmos).

El 28 de septiembre Oleg Novitsky, junto con Vande Hei y Piotr Dubrov, trasladó la Soyuz MS-18 del módulo Rassvet al módulo Nauka. De este modo, la MS-18 se convirtió en el primer vehículo que se ha acoplado con el módulo más nuevo de la estación. El 15 de octubre la Soyuz MS-18 protagonizó un turbio incidente cuando sus propulsores no se apagaron a tiempo durante una prueba. El fallo provocó la pérdida momentánea de orientación de la ISS (se llegaron a detectar giros de hasta 57º en uno de los ejes). Aunque el incidente no fue tan grave como el que protagonizó el módulo Nauka el pasado 29 de julio —en menos de media hora el TsUP de Moscú ya tenía todo bajo control— hubo cierta preocupación por el estado de las reservas de propelentes de la nave, aunque, como se ha podido comprobar hoy con el aterrizaje exitoso de la cápsula, finalmente no había motivo para la preocupación. El equipo de apoyo al aterrizaje de la Soyuz MS-18 participaron doscientas personas, doce helicópteros Mil Mi-8MTV5-1, tres aviones Antónov An-12 y An-26, además de cinco vehículos anfibios especiales —los inconfundibles «pájaros azules»— y veinte vehículos adicionales (coches, furgonetas, etc.). Los tres cosmonautas de la Soyuz MS-18 fueron trasladados por helicóptero a la ciudad de Karagandá, como es tradición, donde fueron agasajados por las autoridades kazajas y, de allí, partieron en avión hasta la Ciudad de las Estrellas (TsPK) de Moscú.
Toda la Expedición 65, más Peresild y Shipenko, al completo (Roscosmos).

Configuración de la ISS antes de la partida de la Soyuz MS-18 (NASA).

La tripulación llega al TsPK de Moscú (Roscosmos).
La entrada Regreso de la Soyuz MS-18: termina el rodaje de Vyzov, la primera película en órbita fue escrita en Eureka.
Vía Cava
Vía Cava
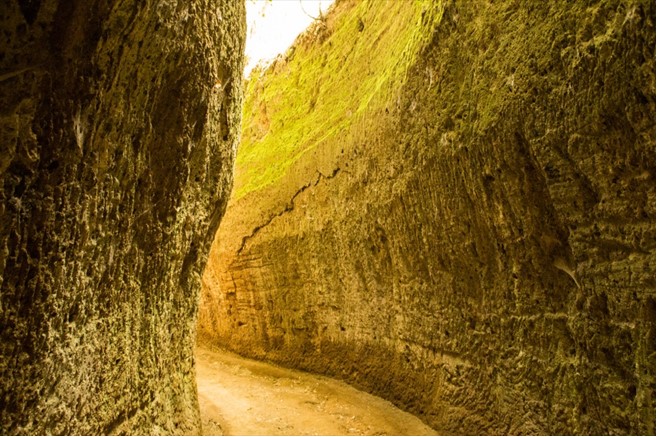
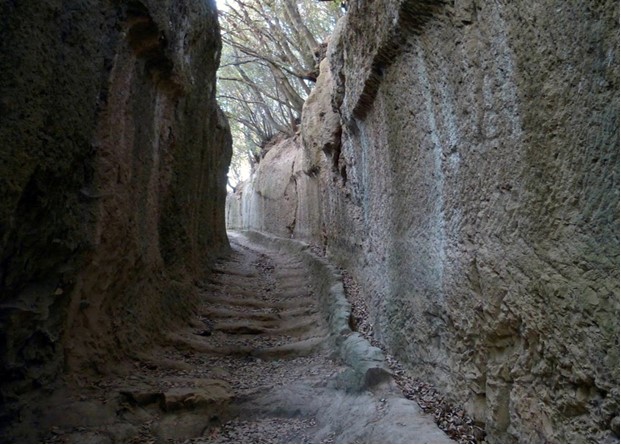
Los misteriosos caminos tallados en la roca por los etruscos o pueblos anteriores
Por Guillermo Carvajal, y otros.
Tramo de la Vía Cava de Pitigliano / foto Myotome en Flickr
Al sur de la Toscana, alrededor de las localidades de Sovana, Sorano y Pitigliano, existe una red de caminos o vías excavados en la roca viva, de los que se sabe que sus autores fueron los etruscos o pueblos anteriores a ellos, pero se desconoce absolutamente su función original.
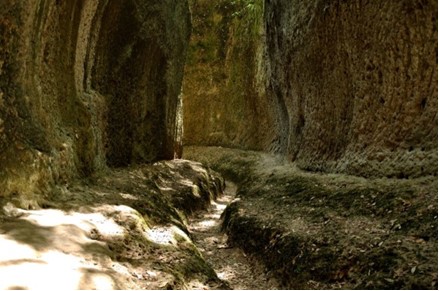
Via Cava de San Rocco / foto Assia Carannante en Flickr
Se los denomina Vía Cava o Cavoni, y consisten principalmente en trincheras de ancho y largo variable, excavadas como acantilados casi verticales en diferentes tipos de lecho rocoso, a veces de hasta 20 metros de altura.
Se ha especulado con que pudieron servir como sistema de defensa contra invasores, animales salvajes o fuerzas de la naturaleza. Aunque a menudo datados como tallados por civilizaciones prerromanas en el primer o segundo milenio a.C., los constructores y el propósito de la red de carreteras son en gran medida confusos, y hay indicios de que son mucho más antiguos de lo que se suponía.
Via Cava de la necrópolis de Sovana / foto Sidvics en Wikimedia Commons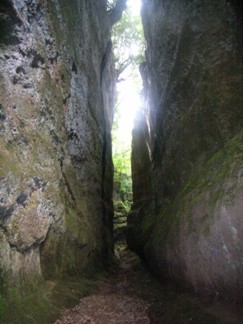
Estos caminos, algunos de los cuales conectan varios asentamientos con una antigua necrópolis etrusca, discurren en profundidad a través de colinas y cimientos rocosos. Se dice que su construcción es el resultado del desgaste a través de la toba blanda por el paso de carros de ruedas con armazón de hierro, creando surcos profundos que requerían que la carretera se recortara con frecuencia a una superficie lisa. En ese sentido se asemejarían mucho a los famosos Cart Ruts de Malta.
Aparentemente propor cionaban un camino razonablemente inclinado para transportar cosas arriba y abajo por los acantilados de la Toscana, y muchos conectan también las colinas con el fondo de los valles o asentamientos entre sí. En cualquier caso las marcas de cinceles son visibles en toda la superficie rocosa de las vías, lo que indica que efectivamente fueron talladas y el laborioso proceso por el que se crearon estos singulares pasadizos, pero con qué propósito sigue siendo un misterio. Sobre todo porque resulta extraño que quien lo hizo prefiriese tallar la roca en lugar de construir el camino sobre ella o a su alrededor.
cionaban un camino razonablemente inclinado para transportar cosas arriba y abajo por los acantilados de la Toscana, y muchos conectan también las colinas con el fondo de los valles o asentamientos entre sí. En cualquier caso las marcas de cinceles son visibles en toda la superficie rocosa de las vías, lo que indica que efectivamente fueron talladas y el laborioso proceso por el que se crearon estos singulares pasadizos, pero con qué propósito sigue siendo un misterio. Sobre todo porque resulta extraño que quien lo hizo prefiriese tallar la roca en lugar de construir el camino sobre ella o a su alrededor.
En la época romana, algunos segmentos de la Vía Cava pasaron a formar parte de la red de carreteras que estaba conectada con el tronco principal de la Vía Clodia, una antigua carretera que unía Roma y Manciano a través de la Toscana. Más tarde ya en la Edad Media, pequeños santuarios y crucifijos fueron tallados y añadidos en las paredes de la roca.
Via Cava de San Giusseppe / foto Luca_Sbarra
Hoy en día, estos senderos son un atractivo turístico más de la zona
Para saber más: http://www.maneggiobelvedere.it/vie%20cave.htm
http://www.italiamedievale.org/portale/linsediamento-rupestre-di-santa-cecilia/?lang=es
En la zona de Pitigliano, hoy en día todavía se pueden practicar senderismo en muchas formas: la Via Cava di Poggio Cani (la más cercana al pueblo), la Via Cava di Fratenuti (la más particular, con paredes de hasta 20 m de altura), la Via Cava la Madonna delle Grazie (que sube al santuario del mismo nombre), la Via Cava del Gradone (dentro del museo al aire libre Alberto Manzi, con dos necrópolis etruscas), la Via Cava di San Giuseppe, más allá del río Lente. Esta última, en particular, se encuentra entre las calles más sugestivas de la zona, además de ser la más larga y principal, pasando la Fontana dell’Olmo (un elemento arquitectónico que se conserva en el Museo Arqueológico Cívico de la Civilización Etrusca), hasta a SovanaTambién en este caso, una necrópolis etrusca es visible en el camino. Finalmente, la tradicional procesión de 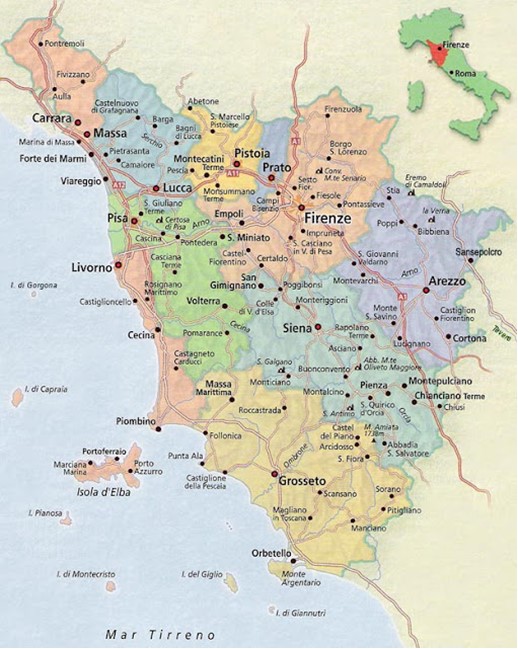 antorchas de San Giuseppe, que tiene lugar el 19 de marzo, está vinculada a esta Vía Cava. El vínculo entre los antiguos ritos paganos y la atmósfera, que continúa hoy, de la oscuridad en el camino, se remonta a la era cristiana, cuando se cavaron pequeños nichos con imágenes sagradas pintadas, los llamados “cazadores”, para proteger Los caminantes, con el fin de proteger a los viajeros.
antorchas de San Giuseppe, que tiene lugar el 19 de marzo, está vinculada a esta Vía Cava. El vínculo entre los antiguos ritos paganos y la atmósfera, que continúa hoy, de la oscuridad en el camino, se remonta a la era cristiana, cuando se cavaron pequeños nichos con imágenes sagradas pintadas, los llamados “cazadores”, para proteger Los caminantes, con el fin de proteger a los viajeros.
Algunos de los más importantes tramos son:
Via Cava di San Giuseppe
Via Cava di San Rocco
Via Cava della Madonna delle Grazie
Via Cava di Fratenuti
Vie Cave di Sorano
Via Cava di San Sebastiano
Via Cava di Poggio Prisca
Vía Cava de Pitigliano
Via Cava de la necrópolis de Sovana
Via Cava di San Giuseppe

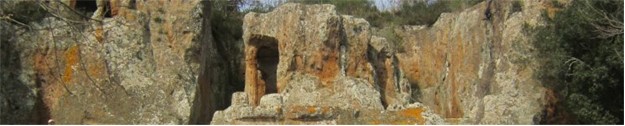
 Asentamiento rupestre de San Rocco
Asentamiento rupestre de San Rocco
Vie Cave e le Tombe Etrusche di Sovana


Área arqueológica de Pitigliano

Inspiration4-SpaceX
Primer vuelo espacial con tripulación civil – SpaceX
16 September 2021 
A partir de las 08:02 horas (EDT), la empresa aeroespacial tendrá una ventana de cinco horas para realizar en lanzamiento a bordo de la nave espacial Dragon, desde el Complejo de Lanzamientos 39A, en el Centro Espacial Kennedy de la Administración Nacional de Aeronáutica y el Espacio (NASA), en Florida.
A una velocidad de unos 28 mil 160 kilómetros por hora (17 mil 500 millas por hora), la cápsula dará la vuelta al planeta cada 90 minutos, en el que es un recorrido de mayor envergadura que los realizados recientemente por los millonarios Richard Branson y Jeff Bezos.
SpaceX ha lanzado su cuarta nave Crew Dragon tripulada en la misión Inspiration4 (Inspirati④n). Se trata de la primera misión comercial de SpaceX —es decir, que no tiene a la NASA como cliente— y ha acaparado la atención de los medios de todo el mundo al ser también la primera misión cuya tripulación está formada exclusivamente por astronautas no profesionales. El lanzamiento tuvo lugar el 16 de septiembre de 2021 a las 00:02 UTC, cuando un Falcon 9 Block 5 despegó desde la rampa 39A del Centro Espacial  Kennedy (Florida) con la cápsula Crew Dragon C207 Resilience. La primera etapa, la B1062, efectuaba su tercera misión y fue recuperada poco después tras aterrizar con éxito en la barcaza JRTI (Just Read The Instructions). Esta ha sido la 23ª misión de un Falcon 9 en 2021 y la segunda tripulada tras la misión Crew-2 que despegó en abril.
Kennedy (Florida) con la cápsula Crew Dragon C207 Resilience. La primera etapa, la B1062, efectuaba su tercera misión y fue recuperada poco después tras aterrizar con éxito en la barcaza JRTI (Just Read The Instructions). Esta ha sido la 23ª misión de un Falcon 9 en 2021 y la segunda tripulada tras la misión Crew-2 que despegó en abril.
Lanzamiento de Inspiration4 (SpaceX).
El vuelo salió puntual y sin contratiempos a las ocho de la noche (hora de la Florida).
La tripulación de la misión Inspiration4 está formada por Jared Isaacman (comandante), Sian Proctor (piloto), Hayley Arcenaux (oficial médica) y Christopher Sembroski (especialista de misión), todos ellos estadounidenses. Como primera tripulación n o profesional de la historia, huelga decir que para todos ellos este es su primer vuelo espacial. Isaacman (38 años) es un magnate que se hizo rico gracias a la empresa Shift4 Payments, de la cual es CEO. Esta fortuna le ha permitido contratar la primera misión privada de SpaceX a cambio de una cantidad de dinero que no se ha hecho pública (como referencia, cada uno de los cuatro asientos de la Crew Dragon en la misión privada Axiom 1 se vendió por unos 55 millones de dólares cada uno). Además, Isaacman es piloto y acumula numerosas horas de vuelo en todo tipo de aeronaves, incluyendo reactores de altas prestaciones como el MiG-29 (sí, Isaacman tiene un MiG-29). También es fundador de la empresa Draken International, encargada de entrenar pilotos para los militares estadounidenses.
o profesional de la historia, huelga decir que para todos ellos este es su primer vuelo espacial. Isaacman (38 años) es un magnate que se hizo rico gracias a la empresa Shift4 Payments, de la cual es CEO. Esta fortuna le ha permitido contratar la primera misión privada de SpaceX a cambio de una cantidad de dinero que no se ha hecho pública (como referencia, cada uno de los cuatro asientos de la Crew Dragon en la misión privada Axiom 1 se vendió por unos 55 millones de dólares cada uno). Además, Isaacman es piloto y acumula numerosas horas de vuelo en todo tipo de aeronaves, incluyendo reactores de altas prestaciones como el MiG-29 (sí, Isaacman tiene un MiG-29). También es fundador de la empresa Draken International, encargada de entrenar pilotos para los militares estadounidenses.
Jared Isaacman, Dra. Sian Proctor, Hayley Arceneaux y Christopher Sembroski. Crédito: Inspiration4 / John Kraus
El resto de la tripulación fue seleccionada por Isaacman y su equipo usando distintos métodos. Hayley Arcenaux (29 años) fue elegida directamente para el «asiento de la esperanza» por Isaacman. Arcenaux es una enfermera del hospital Saint Jude (Tennessee) especializada en tratar niños con cáncer (Isaacman ha donado cien millones de dólares a este hospital y ha creado una campaña benéfica con motivo de la misión). La propia Hayley sufrió cáncer de niña y, a raíz de esta enfermedad, fue sometida a varias operaciones de cirugía, por lo que fue necesario implantarle una prótesis en la pierna izquierda. Gracias a esta misión, Arcenaux se ha convertido en la ciudadana estadounidense más joven en alcanzar la órbita (el récord sigue en posesión de Gherman Titov, que viajó a la órbita con 26 años). Christopher Sembroski (42 años) fue seleccionado para ocupar el «asiento de la generosidad» a través de un concurso en el que participaron todas aquellas personas que donaron dinero al  hospital Saint Jude a través de una campaña creada específicamente para la misión Inspiration4. Sembroski trabaja como ingeniero para la empresa aeroespacial Lockheed Martin y ha sido miembro de la fuerza aérea (USAF). Del mismo modo, Sian Proctor (51 años) fue seleccionada para el «asiento de la prosperidad» mediante un concurso en el que se premiaba el mejor vídeo viral de promoción en redes sociales. Geóloga de formación, tiene un doctorado en educación científica. Ha aparecido en varias producciones audiovisuales y se presentó a la selección de astronautas de la NASA de 2009, aunque no consiguió ser admitida.
hospital Saint Jude a través de una campaña creada específicamente para la misión Inspiration4. Sembroski trabaja como ingeniero para la empresa aeroespacial Lockheed Martin y ha sido miembro de la fuerza aérea (USAF). Del mismo modo, Sian Proctor (51 años) fue seleccionada para el «asiento de la prosperidad» mediante un concurso en el que se premiaba el mejor vídeo viral de promoción en redes sociales. Geóloga de formación, tiene un doctorado en educación científica. Ha aparecido en varias producciones audiovisuales y se presentó a la selección de astronautas de la NASA de 2009, aunque no consiguió ser admitida.
La tripulación durante el entrenamiento en vuelos parabólicos (Inspiration4). Proctor y Arcenaux camino de la rampa 39A (SpaceX). La tripulación durante el entrenamiento (SpaceX).
La misión Inspiration4 permanecerá tres días en el espacio sin acoplarse a la ISS ni a ningún otro vehículo. La órbita elegida para la misión tendrá una altura de 575 kilómetros y 51,6º de inclinación (por encima de la ISS y con una inclinación ligeramente diferente). Es la segunda misión espacial de la cápsula Crew Dragon C207 Resilience tras la Crew-1 que despegó en noviembre de 2020. Para este vuelo, la C207 ha sido modificada e incorpora una cúpula panorámica en vez del sistema de acoplamiento andrógino para acoplarse a la ISS (el diseño de la cúpula comenzó en diciembre de 2020, así que ha sido construida en un tiempo récord). La vista desde la cúpula será espectacular, pero hay que señalar que para acceder a la misma sigue siendo necesario abrir la escotilla frontal.
Aunque en algunos medios se ha afirmado que la órbita de esta misión es más alta que la de la ISS o la del Hubble —como si el Hubble tuviese algo de especial: hay cientos de satélites situados en órbitas más altas, empezando por los GPS, por ejemplo—, vale la pena recordar que el transbordador espacial llegó a alcanzar perigeos más altos en algunas misiones y, en cualquier caso, el récord de órbita terrestre más alta en una misión tripulada lo sigue teniendo la Gémini 11, que alcanzó un apogeo de 1373 kilómetros en 1966 (aunque bien es cierto que el perigeo de la Gemini 11 era de 290 kilómetros). En todo caso, la altura de la órbita de Inspiration4 es sin duda de las más elevadas en una misión tripulada (esta cifra no es casual, pues tiene como objetivo aumentar el impacto mediático de la misión al demostrar que una misión tripulada comercial es capaz de superar la altura de la órbita de la ISS). No obstante, la diferencia de alturas no es excepcional y alcanzar esta órbita no es especialmente difícil para el Falcon 9.
La misión Inspiration4 lleva varios experimentos científicos a bordo, la mayoría de ellos relacionados con el estudio de los efectos de la radiación en tejidos biológicos (debido a la altura de esta misión, la dosis de radiación recibida por unidad de tiempo será mayor que la obtenida a bordo de la ISS por su mayor cercanía a los cinturones de radiación; eso sí, debido a la breve duración del vuelo, la dosis total será inferior a la de una misión normal en la ISS). Con este lanzamiento hay en estos momentos tres naves Dragon en el espacio al mismo tiempo: la Crew Dragon C206 Endeavour —acoplada a la ISS en la misión Crew-2—, la Dragon 2 C208 de carga —también acoplada a la ISS— y la C207 Resilience en la misión Inspiration4. Es la primera vez una nave tripulada realiza una misión en solitario sin acoplarse con ningún otro vehículo desde la misión china Shenzhou 7 en septiembre de 2008. También es la primera misión en solitario de una Crew Dragon. En estos momentos hay catorce seres humanos en órbita a bordo de tres vehículos espaciales diferentes: siete en la ISS, tres en la estación espacial china y cuatro en la Crew Dragon de la misión Inspiration4.
Los miembros de Inspiration4 llevan varios objetos al espacio, incluido un ukelele que tocará Sembroski en órbita, un bolígrafo Fisher con un pedazo del Apolo 11 dentro, relojes IWC Schaffhausen para toda la tripulación y otros objetos, muchos de los cuales serán subastados en varias acciones benéficas. SpaceX planea lanzar otras misiones privadas, pero las que actualmente están aseguradas en firme, las Axiom 1 y Axiom 2, se acoplarán a la ISS y llevarán, al menos, un astronauta profesional que vigilará al resto de turistas espaciales.
La misión Inspiration4 ha sido presentada por numerosos medios como la primera «misión civil» de la historia, pero esto es incorrecto. La primera tripulación formada totalmente por astronautas que no habían sido miembros de las fuerzas armadas fue la Soyuz TMA-3, que despegó en 2003 con Alexander Kaleri, Pedro Duque y Michael Foale. Además, en este sentido, se puede señalar que Christopher Sembroski sirvió en la fuerza aérea. No obstante, en inglés se suele emplear el adjetivo «civil» con el matiz de «no profesional». Y, ciertamente, Inspiration4 sí que es la primera misión orbital en la que ninguno de sus miembros es un astronauta profesional. También se puede decir que es la primera misión orbital tripulada encargada por un individuo a una empresa privada sin mediación de ningún organismo gubernamental. Sea como sea, les deseamos un buen y feliz vuelo.
Por lo tanto, Inspiration4, como se conoce la misión, representa mucho más la visión de la ciencia ficción: la pos ibilidad de que la gente común viaje realmente al espacio. “Es un hito en el acceso al espacio”, dijo a la revista Technology Review el historiador espacial John Logsdon. Del éxito de este viaje dependerá que otros se realicen con más frecuencia en el futuro. “Esta misión es un trampolín”, dice Isaacson.
ibilidad de que la gente común viaje realmente al espacio. “Es un hito en el acceso al espacio”, dijo a la revista Technology Review el historiador espacial John Logsdon. Del éxito de este viaje dependerá que otros se realicen con más frecuencia en el futuro. “Esta misión es un trampolín”, dice Isaacson.
“Tienes que despejar este obstáculo para hacer muchas más misiones, más grandes y grandiosas: lr a la Luna, a Marte y más allá”, añadió. El vuelo es histórico, además, porque el entrenamiento que recibió la tripulación fue intenso e incluyó el uso de simuladores del vuelo y la preparación para muchas operaciones, incluidas las de emergencias. Muchos otros civiles han ido al espacio pero bajo la supervisión de astronautas de la Nasa. Esta vez la Nasa fue un simple espectador.
Esta misión tiene el objetivo de recaudar 200 millones de dólares para el hospital St. Jude Children’s Research Hospital y apoyar a niños con cáncer y otras enfermedades potencialmente mortales.
La trayectoria de este vuelo histórico y de los tripulantes del Dragon Crew se puede seguir desde la página de Space X.(www.spaceX.com).
Jared Isaacman compró a SpaceX este vuelo tripulado por civiles: Sian Proctor, Hayley Arceneaux y Chris Sembroski. – Foto: Spacex
Fases del lanzamiento:
T-00:45:00: se autoriza la carga de combustible.
T-00:42:00: el brazo de acceso de la tripulación se retira.
T-00:37:00: se arma el sistema de escape de emergencia.
T-00:35:00: comienza la carga de queroseno (RP-1).
T-00:35:00: comienza la carga de oxígeno líquido de la primera etapa.
T-00:16:00: comienza la carga de oxígeno líquido de la segunda etapa.
T-00:07:00: enfriamiento de los motores Merlin antes del despegue.
T-00:05:00: la Crew Dragon pasa a potencia interna.
T-00:01:00: comprobaciones finales del ordenador de abordo.
T-00:01:00: comienza la presurización de los tanques de propelentes.
T-00:00:45: el director de vuelo autoriza el lanzamiento.
T-00:00:03: envío de la orden de ignición.
T-00:00:00: despegue.
T+00:01:02: Max Q (máxima presión dinámica).
T+00:02:37: apagado de los nueve Merlin de la primera etapa, MECO (Main Engine Cut-Off).
T+00:02:40: separación de la primera etapa.
T+00:02:41: ignición de la segunda etapa.
T+00:07:30: encendido de entrada de la primera etapa.
T+00:08:51: apagado de la segunda etapa, SECO (Second Stage Cut-Off).
T+00:09:04: encendido de aterrizaje de la primera etapa.
T+00:09:31: aterrizaje de la primera etapa.
T+00:12:09: separación de la Crew Dragon de la segunda etapa.
T+00:13:02: apertura del cono frontal de la Crew Dragon.


Dragon C207 Resilience (SpaceX).

Arcenaux dentro de la cúpula (SpaceX).

La cúpula durante el montaje (SpaceX).


Modelo de la Crew Dragon con la cúpula (SpaceX).
El comandante Isaacman durante el entrenamiento (SpaceX).

Orbita de Inspiration4 (SpaceX).

Durante el entrenamiento en la rampa (SpaceX).




La tripulación de Inspiration4 vuela sobre la rampa 39A con el Black Diamond Jet Team (Inspiration4).
Arcenaux con el Tesla que le llevará a la rampa (Inspiration4).
Isaacman «firma» en el hollín con su dedo sobre la etapa B1062 (SpaceX).
La Crew Dragon Resilience antes del lanzamiento (SpaceX).
Traslado a la rampa:
El cohete en la rampa:
La entrada Lanzamiento de Inspiration4, la primera misión orbital formada solo por astronautas no profesionales fue escrita en Eureka.
Sobre la Crew Dragon
Un modelo a tamaño real del módulo de la nave espacial Crew-1. (Photo by GREGG NEWTON/AFP via Getty Images)
La misión Inspiration4 hará uso de una cápsula SpaceX Crew Dragon, el vehículo diseñado para transportar astronautas de la NASA hacia y desde la Estación Es pacial Internacional (EEI), la cual realizó sus primeros vuelos tripulados el año pasado.
pacial Internacional (EEI), la cual realizó sus primeros vuelos tripulados el año pasado.
Si bien la nave está diseñada principalmente para uso de la NASA, la Crew Dragon sigue siendo propiedad privada de SpaceX, lo que le permite a la compañía vender asientos a bordo a turistas espaciales, investigadores privados y cualquier persona que esté dispuesta a pagar el precio de aproximadamente US$ 50 millones por un asiento. Isaacman, que está pagando los cuatro asientos en Inspiration 4, no ha dicho cuánto pagó por la misión.
La nave espacial Crew Dragon tiene la capacidad de transportar a siete pasajeros, desde y hacia la órbita terrestre. La cápsula tiene una altura de 8,1 metros, un diámetro de 4 metros y una capacidad de carga de 165 kilogramos, la cual se repartirá entre los elementos esenciales de la tripulación como en el equipo científico de investigación y experimentación de microgravedad.
La Crew Dragon es una nave tripulada de unas 12,1 toneladas. Está dividida en dos secciones, la cápsula y el «maletero» (trunk). Tiene una longitud total de 8,1 metros y un diámetro de 4 metros. La cápsula mide 4,9 metros de alto y el maletero 3,7 metros, con un diámetro máximo de 4 metros. El volumen de la cápsula es de 9,3 metros cúbicos, mientras que el del maletero es de 37 metros cúbico. Tiene capacidad teórica para siete astronautas, aunque por el momento lleva un máximo de cuatro tripulantes. En todo caso, es la cápsula en servicio La cápsula incorpora ocho motores hipergólicos SuperDraco (de 71 kilonewton de empuje) que sirven tanto como sistema de escape como para otras maniobras orbitales en caso de emergencia. La cápsula también dispone de 16 motores de maniobra Draco de 400 newton de empuje. El maletero no incorpora motores ni paneles solares desplegables, solo fijos, y lleva cuatro aletas aerodinámicas para estabilizar la nave en caso de que haya una aborto durante el despegue. En la parte frontal la cápsula lleva un cono abatible que cubre el sistema de acoplamiento andrógino IDA o, en este caso, la cúpula panorámica. La cápsula cuenta con cuatro paracaídas principales —es la cápsula tripulada con mayor número de paracaídas— que se encuentran alojados bajo la escotilla de entrada. La Crew Dragon ameriza cerca de la costa de Florida, en el océano Atlántico o el Golfo de México.
La tripulación realizará experimentos diseñados para expandir el conocimiento del universo. “Inspiration4 se compromete a asignar la máxima masa posible a esta valiosa investigación, proporcionando acceso al espacio para proyectos inspiradores que de otro modo serían incapaces de superar las altas barreras de la investigación tradicional basada en el espacio”, se lee en el sitio web de la misión.


El primer día de la misión Inspiration4 en el espacio
Los cuatro tripulantes de la nave de SpaceX completaron más de 15 órbitas alrededor de la Tierra
17 sep 2021.
Inspiration4, la primera misión totalmente civil a la órbita terrestre, ha cumplido su primera jornada con los cuatro astronautas aficionados experimentando la vida en el espacio.
«¡La tripulación de Inspiration4 tuvo un increíble primer día en el espacio! Han completado más de 15 órbitas alrededor del planeta Tierra desde el despegue y han hecho un uso completo de la cúpula del Dragón», comenta un tuit con imágenes difundido este viernes en la cuenta de Twitter de la misión.
En las fotografías puede verse a los turistas espaciales en perfecto estado y disfrutando de las vistas de la Tierra y el espacio que ofrece el ventanal en forma de cúpula con que va equipado la nave Crew Dragon Resilience de Space X. En su cuenta de Twitter, Elon Musk, fundador de Space X, comentó que ha hablado con la tripulación y que  «todo va bien».
«todo va bien».
Un cohete el Falcon 9 de SpaceX lanzó con éxito la misión a las 00.02 UTC del 16 de septiembre desde el Centro Espacial Kennedy de la NASA. Aproximadamente tres días después del despegue, Dragon y la tripulación del Inspiration4 aterrizarán en uno de los posibles sitios de aterrizaje frente a la costa de Florida.
Inspiration4 está comandado por Jared Isaacman, fundador y director ejecutivo de Shift4 Payments y un piloto y aventurero consumado. Junto a él se encuentran la oficial médica Hayley Arceneaux, asistente médica del St. Jude Children’s Research Hospital y sobreviviente de cáncer pediátrico; el especialista en misiones Chris Sembroski, veterano de la Fuerza Aérea e ingeniero de datos aeroespaciales; y la piloto de misión Sian Proctor, geocientífica, emprendedora y piloto capacitada.
Agrega que antes de haberse ido a dormir, los miembros de la tripulación «viajaron 5,5 veces alrededor de la Tierra, completaron su primera ronda de investigación científica y disfrutaron de un par de comidas». La firma fundada por Elon Musk informó de que en su segunda jornada los cuatro tripulantes «realizarán investigaciones adicionales y echarán un primer vistazo a la cúpula» de la cápsula Dragón.
Precisamente, SpaceX publicó la madrugada de este jueves en la red social un breve vídeo tomado desde la cúpula de observación de la Dragon con la Tierra de fondo. «Pocos han venido antes y muchos están a punto de seguir. La puerta está abierta ahora y es bastante increíble», confesó el miércoles desde el interior de la cápsula el multimillonario Jared Isaacman, comandante de la misión y quien además corre con todos los gastos.
Casi unas tres horas después de despegar la noche del miércoles desde el Centro Espacial Kennedy, en Cabo Cañaveral (Florida), la cápsula Dragon alcanzó una órbita circular de 585 kilómetros (unas 360 millas) de distancia de la Tierra, más que la Estación Espacial Internacional (EEI).
Los medios estadounidenses han destacado este jueves que además de ser el primer vuelo espacial sin ningún astronauta a bordo, es también el primer vuelo con una piloto afroamericana (Proctor) y con la estadounidense mas joven que llega al espacio orbital: Arceneaux, de 29 años, que sobrevivió al cáncer.
Los cuatro civiles recibieron entrenamiento durante seis meses sobre maniobras en gravedad cero y fueron además preparados para emergencias, ejercicios de entrada y salida de naves espaciales y trajes espaciales, así como simulaciones de misiones parciales y completas.
Inspiration4 es la cuarta misión tripulada para SpaceX, pero la primera que no transporta astronautas capacitados profesionalmente, y además tiene la meta de recaudar 200 millones de dólares -170 millones de euros- para el hospital infantil de investigación St. Jude, en Memphis (Tennessee).
Vuelve a la Tierra la ‘Inspiration4’, la primera misión espacial con una tripulación íntegramente civil
19/09/2021
Los cuatro tripulantes de la primera excursión orbital de tres días organizada de forma privada, gestionada por la compañía SpaceX, han regresado este sábado a la Tierra sin incidentes.
Durante una retransmisión en directo del aterrizaje, recogida por la cadena CNN, el multimillonario y comandante de la misión, Jared Isaacman, ha agradecido a la compañía la experiencia.
Es el primero de varios vuelos espaciales privados que la compañía de Elon Musk está planeando para los próximos años, y el próximo está programado para principios de 2022, ha informado la agencia Bloomberg.
La misión Inspiration4 de SpaceX ameriza con éxito después de pasar tres días orbitando a la Tierra
(23:08 GMT) 18 septiembre, 2021

Así ameriza misión de SpaceX en las costas de Florida 2:05
(CNN Español) — La misión Inspiration4 de SpaceX —el primer vuelo orbital tripulado en su totalidad por turistas— amerizó con éxito en la costa de Florida el sábado por la noche.
El regreso de Inspiration4 marca el final del primer vuelo a la órbita de la Tierra realizado en su totalidad por turistas o personas que no son astronautas.
Después de pasar tres días orbitando a la Tierra cada 90 minutos a lo largo de una ruta de vuelo personalizada de 575 km, los cuatro novatos volvieron a entrar en la atmósfera de la Tierra a bordo de la Cápsula Dragon de SpaceX.
Al regresar de la órbita, las temperaturas externas del Crew Dragon pueden alcanzar hasta 1926 grados Celsius, y los astronautas experimentarán 4,5 Gs de fuerza empujándolos hacia sus asientos, todo mientras la atmósfera cada vez más espesa choca contra la cápsula.
Durante el documental de Netflix sobre la misión Inspiration4, el CEO de SpaceX, Elon Musk describió a una cápsula que atraviesa el reingreso como “como un meteoro en llamas entrando”.
“Por eso es difícil no vaporizarse”, añadió.
Inspiration4: la particular misión espacial de SpaceX 1:13
La tripulación de Inspiration4 pasó los últimos tres días volando libremente a bordo de su cápsula de 3,9 metros de ancho a una altitud de aproximadamente 563 kilómetros, 160 kilómetros de altitud más que donde está la ISS, y más de lo que cualquier humano ha volado en décadas.
Durante el viaje de tres días, la cápsula Dragon dio la vuelta a la tierra unas 50 veces.
Aunque no son los primeros turistas en viajar a la órbita, la misión Inspiration4, es notable porque no implicó una estadía en la Estación Espacial Internacional (ISS, por sus siglas en inglés) bajo la tutoría de astronautas profesionales, como lo han hecho las misiones anteriores con turistas espaciales.
El 18 de septiembre a las 23:07 UTC la Crew Dragon C207 Resilience amerizó en el océano Atlántico a unos cincuenta kilómetros de la costa de Florida con Jared Isaacman, Sian Proctor, Hayley Arcenaux y Christopher Sembroski a bordo. Terminó así Inspiration4, la primera misión privada de SpaceX y la primera compuesta en su totalidad por astronautas no profesionales. También ha sido la primera vez que una nave tripulada estadounidense realiza una misión sin acoplarse con otro vehículo desde de la fatídica misión STS-107 Columbia de 2003. Isaacman, Proctor, Arcenaux y Sembroski han estado casi tres días en el espacio —71 horas y 45 órbitas— viviendo dentro de la Crew Dragon y disfrutando de las vistas gracias a la cúpula panorámica que llevaba la nave en sustitución del sistema de acoplamiento.
La vida a bordo de la Crew Dragon en estos tres días ha tenido que ser intensa. La nave es más espaciosa que una Soyuz, sí, pero son cuatro tripulantes, no tres, que, además, no gozan de la posibilidad de «aislarse» en el módulo de descenso o en el módulo orbital para buscar intimidad. En la Crew Dragon esta intimidad se logra gracias a «cortinas» para separar los espacios llegado el caso. En este sentido, la misión le ha servido a SpaceX para probar cómo se comporta una Crew Dragon durante un vuelo en solitario.

Hayley en la cúpula (Inspiration4).



Sembroski en la cúpula (Inspiration4).

Otra vista de la cúpula de la misión Inspiration4.
La cápsula con los astronautas siendo recogida del agua (SpaceX).
La misión civil de SpaceX contó con un ‘quinto pasajero’: un xenomorfo como el de ‘Alien’

Capturas del vídeo subido por uno de los tripulantes de la misión Inspiration4.
La pasada semana concluyó la expedición Inspiration4, la primera excursión orbital de tres días organizada de forma privada por la empresa SpaceX, de Elon Musk, y que tuvo la presencia de cuatro astronautas no profesionales. Pero ahora se ha descubierto que no estaban solos.
Jared Isaacman, uno de los pasajeros, reveló que al viaje se llevó un xenomorfo, es decir, un e xtraterrestre como el de la película Alien: el octavo pasajero, solo que en este caso era el quinto.
xtraterrestre como el de la película Alien: el octavo pasajero, solo que en este caso era el quinto.
“Este es un xenomorfo y es amigable, aún no nos ha atacado“, dijo Isaacman. En efecto, se trata de un juguete, que replica al inquietante ser que se adhiere al rostro de John Hurt en la película.
No fue el único juguete que orbitó en el espacio. Tal y como recoge Gizmodo, los pasajeros llevaban un peluche en honor al hospital de niños St. Jude, que sirvió como mascota de la misión para revelar ante las cámaras cuando ya se encontraban sin gravedad.
Además, también viajó una figura Funko Pop! inspirada en los nuevos astronautas de Inspiration4, tal y como reveló la propia firma de muñecos en su cuenta de Twitter.
Este ha sido el primero de varios vuelos espaciales privados que la compañía de Elon Musk está planeando para los próximos años, y el próximo está programado para principios de 2022.
Ingenuity
Ingenuity
Mars Helicopter Ingenuity
Tipo de misión: Demostración tecnológica
Página web: Mars Helicopter
Duración de la misión: Planeado: 30 días marcianos
Propiedades de la nave
Fabricante: Laboratorio de Propulsión a Reacción
Masa de lanzamiento: 1.8 kilogramos
Comienzo de la misión
Lanzamiento: 30 de julio de 2020, 11:50 UTC
Vehículo: Atlas V

Acercamiento a Marte: Insignia del helicóptero de Marte del JPL
Ingenuity (previamente llamado Mars Helicopter y con anterioridad Mars Helicopter Scout123456) es un helicóptero robótico que forma parte de la misión Mars 2020. Servirá como demostración tecnológica para explorar objetivos interesantes para estudiar en el planeta Marte, y poder planificar la mejor ruta para la misión encomendada principalmente al rover Perseverance que será colocado en el planeta, y a futuros rovers en Marte.78
El pequeño dron será desplegado del rover Perseverance, y se espera que realice hasta 5 vuelos durante los 30 días, que se espera esté en funcionamiento, coincidiendo con la primera parte de la misión del rover, ya que es una demostración tecnológica.9 Realizará hasta un máximo de cinco vuelos, cada uno de ellos durará aproximadamente 3 minutos, alcanzando alturas que oscilan entre 3 y 10 metros sobre el suelo, pudiendo cubrir distancias de aproximadamente 300 metros por vuelo.10 Será totalmente autónomo y se comunicará con el rover Perseverance directamente después de cada aterrizaje.
Si cumple las expectativas, su diseño podría ser la base para futuras misiones similares.10 La directora del proyecto es MiMi Aung.11 Otros miembros del equipo son la empresa AeroVironment Inc., el Centro de Investigación Ames y el Centro de investigación de Langley, ambos de la NASA.12
El primer vuelo lo realiza el día 19 de abril de 2021 a las 11:30 UTC, encontrándose a unos 400 millones de kilómetros de la Tierra.13
Ingenuity se convirtió en el primer vehículo en hacer un vuelo con motor en otro planeta.
Desde el Laboratorio de Propulsión a Reacción (JPL) y el Instituto de Tecnología de California de la NASA estuvieron estudiando el potencial de enviar un robot explorador aéreo para acompañar al rover Perseverance, terminando por hacer público el proyecto del helicóptero en 2014.1214 A mediados de 2016, se solicitaban 15 millones de dólares para continuar con el desarrollo del helicóptero.15 En diciembre de 2017, se probaron algunos modelos proyectados del helicóptero en una atmósfera marciana simulada en el Ártico,1016 sin ser definitiva su inclusión en la misión ni tampoco aprobada ni financiada.17
El presupuesto federal de los Estados Unidos, anunciado en marzo de 2018, proporcionó 23 millones de dólares para el proyecto del helicóptero,1819 el 11 de mayo de 2018 se anunció que era viable el proyecto para desarrollarlo y probarlo con el tiempo justo para ser incluido en la misión Mars 2020.20
El helicóptero fue sometido a extensas pruebas de dinámica de vuelo y medio ambiente,1021 en agosto de 2019 fue montado en la parte inferior del rover Perseverance.22 Su masa es de poco menos de 1,8 kg2123 y realizará hasta 5 vuelos.212420
Objetivos

Ingenuity es un demostrador tecnológico del Laboratorio de Propulsión a Reacción, que evaluará si es factible volar por Marte de manera segura, también proporcionará una cartografía detallada de la zona que brindaría a los futuros controladores de misiones más información, ayudando de esta manera la planificación de futuras rutas y prevención de riesgos, y facilitará la localización de lugares por donde acceder con el rover y su posterior estudio.252627 Asimismo proporcionará imágenes aéreas con aproximadamente diez veces más resolución que las imágenes orbitales, mostrando características que pueden estar ocultas o excluidas por cámaras móviles.28 Se espera que esta exploración permita a los futuros visitantes dirigirse con seguridad hasta tres veces más lejos por día marciano (sol).29
Esta prueba servirá como base sobre la cual se podrán desarrollar otros ingenios más especializados para la exploración aérea de Marte y otros objetivos planetarios con atmósfera.25103031
Diseño
Diagrama de Ingenuity.
– 1 Rotores diseñados para poder volar en la tenue atmósfera de Marte
– 2 Células solares suministran la energía que carga la batería
– 3 Una cámara de alta resolución permite tomar fotos de sitios ubicados a larga distancia del rover
– 4 Una cámara y otros sensores asociados con un ordenador resistente a diversos fallos permiten gran autonomía
– 5 Patas flexibles para un suave aterrizaje, un sistema de visión activa y un altímetro
– 6 El aislamiento térmico tipo aerogel y la resistencia al calor permiten a las baterías para sobrevivir a las noches
– 7 El helicóptero se comunica con el rover en la banda UHF.
| Mars Helicopter Scout |
Unidades/rendimiento2 |
| Masa | Total: 1,8 kg2 Baterías: 273 g 10 |
| Altura | 0,8 m16 |
| Diámetro del rotor coaxial | 1,2 m16 |
| Revoluciones/min | 1.900–2.800 rpm20 |
| Velocidad punta | 36 km/h |
| Dimensión del chasís | 14 cm² |
| Funcionamiento | 220 W (batería, cargada por paneles solares) |
| Tiempo de vuelo | Hasta 90 segundos, una vez al día |
| Tiempo operativo | ~5 vuelos en ~30 días |
| Rango máximo | Vuelo: 300 m10 Radio: 1.000 m10 |
| Altitud máxima | 10 m10 |
| Velocidad máxima12 | Horizontal: 10 m/s Vertical: 3 m/s |
| 2 cámaras | Imágenes a color en alta resolución Navegación16 |
El helicóptero utiliza rotores coaxiales contrarrotativos de aproximadamente 1,1 m de diámetro. Su carga útil consiste en una cámara de alta resolución con el objetivo apuntando hacia abajo para inspeccionar el suelo y así detectar por dónde se desplaza y poder aterrizar con seguridad posteriormente, también lleva un sistema de comunicación para transmitir datos al rover Perserverance.3233 Aunque se desplaza como un avión, se construyó como una nave espacial que pudiese soportar la fuerza g y las vibraciones durante el lanzamiento. Sus sistemas están fabricados de manera que son resistentes a la radiación y son capaces de operar en un ambiente helado como en ciertas partes de Marte.
El inconsistente campo magnético de Marte impide el uso de brújulas para la navegación, por lo que utilizará una cámara de seguimiento solar integrada al sistema de navegación inercial del JPL. Posee elementos adicionales como giroscopios, odometría visual, sensores de inclinación, altímetro y detectores de peligro.34 Utilizará paneles solares para recargar sus baterías, que son seis celdas de iones de litio de Sony con una capacidad de placa de 2 Ah.10
El prototipo utiliza el procesador Snapdragon de Intrinsyc con un sistema operativo Linux, que también implementa la navegación visual con velocidad estimada derivada de las funciones rastreadas con una cámara. El procesador Qualcomm está conectado a dos unidades microcontroladoras de control de vuelo (MCU) para realizar las funciones de control de vuelo necesarias. Las comunicaciones con el rover se realizan mediante un enlace de radio llamado Zigbee, un chipset estándar de 900 MHz que va montado tanto en el rover como en el helicóptero. El sistema de comunicación fue diseñado para transmitir datos a 250 kbit/s en distancias de hasta 1.000 m.10
Viajó a Marte unido a la parte inferior del rover Perseverance, y se desplegará en la superficie entre 60 y 90 días marcianos tras el aterrizaje. Después, el rover se desplazará 100 m de distancia aproximadamente para que comiencen los vuelos de prueba.353637
Futuro
Esta demostración tecnológica servirá como base sobre la cual se podrán desarrollar helicópteros o ingenios más preparados para misiones más ambiciosas en planetas y lunas con atmósfera.1030 La próxima generación de helicópteros estará en el rango de entre 5 y 15 kg con cargas útiles científicas de entre 0,5 y 1,5 kg. Estas potenciales aeronaves podrán tener comunicación directa con un orbitador y pueden o no continuar trabajando con un objetivo en tierra.36 La siguiente generación de helicópteros podrán utilizarse para explorar regiones con particulares características como que tengan hielo de agua o salmueras donde la vida microbiana del terreno pudiera sobrevivir.
Los helicópteros de Marte también podrán estar preparados para la recuperación rápida de pequeñas cápsulas de muestras para un futuro regreso a un vehículo ascendente de Marte para vuelta a la Tierra.10
Galería
Ingenuity
Drone Ingenuity alimentado con energía solar para ser probado como ayuda para la navegación

Ingenuity
Reproducir contenido multimedia
Animación del Ingenuity (1:07 de duración; 29 de abril de 2020)

Acoplamiento al rover Perseverance (2019)

Acoplamiento de Ingenuity a la parte inferior del rover.
Miembros del equipo de Ingenuity

Reajustando a Ingenuity
Operaciones en Marte
Inicio de separación con el rover Perseverance.


Vertical
Separación completa

Desbloqueo de las aspas

Sombra de Ingenuity durante su primer vuelo
El Ingenuity pesa 1,8 kilogramos en la Tierra, o 0,68 kg en Marte por la menor gravedad de ese planeta.
Su altura es de 0,49 metros, con dos rotores contrarrotatorios de 1,2 metros de longitud que girarán a unas 2.400 rpm. Sobre estos se encuentra la placa de células solares usadas para recargar las seis baterías de ion-litio que aportan la electricidad precisa. La caja que forma el fuselaje y que incluye los sistemas del Ingenuity mide 13,6 x 19,5 x 16.3 cm, y se apoya sobre cuatro patas fabricadas en fibra de carbono de 38,4 cm de longitud. Con ellas, la parte baja del fuselaje queda a 13 cm del suelo.
El Ingenuity lleva además un pequeño fragmento del entelado original del Flyer con el que los hermanos Wright hicieron su primer vuelo el 17 de diciembre de 1903.
El pequeño rectángulo blanco es el trozo de entelado del avión de los hermanos Wright.

Foto del Ingenuity tomada por el rover Perseverance tras depositarlo sobre el terreno marciano.
Se puede ver un log de cada uno de sus vuelos aquí
Como se comprueba en la lectura de este artículo, se superaron con creces las previsiones de: vuelos, desplazamientos, supervivencia, duración, etc.
Tras retrasar un par de días el vuelo en Marte del helicóptero Ingenuity, la NASA decidió posponerlo de nuevo, al menos una semana. Inicialmente el primer vuelo se programó para el domingo 11 de abril, pero el día anterior se decidió el aplazamiento. Después se reprogramó para el miércoles, pero de nuevo se decidió retrasarlo “al menos hasta la próxima semana”. Tras haber sido depositado en el suelo marciano por el rover Perseverance, la NASA realizó diversas pruebas funcionales del Ingenuity, incluyendo hacer girar los rotores del mismo. Se revisaron y arreglaron los problemas de software que impedían su buen funcionamiento.
El primer vuelo de Ingenuity en Marte fue el pasado 19 de abril y duró menos de un minuto. Eso sí, fue un vuelo histórico. La NASA ha hecho historia este lunes al completar con éxito el primer vuelo controlado y con motor de una aeronave en otro planeta. El helicóptero Ingenuity, que se desprendió del ‘rover’ Perseverance hace unas semanas, ha d espegado de la superficie de Marte en torno a las 10:00 (hora española), pero no ha sido hasta nuestras 13:00 cuando los datos han llegado a la Tierra y el equipo del Jet Propulsion Laboratory (JPL) de Los Ángeles ha estallado en júbilo detrás de las mascarillas. Este primer vuelo en Marte tuvo una duración de 39,1 segundos y el pequeño dron no se desplazó horizontalmente, aunque alcanzó una altura de unos 3 metros y giró sobre sí mismo 90º.
espegado de la superficie de Marte en torno a las 10:00 (hora española), pero no ha sido hasta nuestras 13:00 cuando los datos han llegado a la Tierra y el equipo del Jet Propulsion Laboratory (JPL) de Los Ángeles ha estallado en júbilo detrás de las mascarillas. Este primer vuelo en Marte tuvo una duración de 39,1 segundos y el pequeño dron no se desplazó horizontalmente, aunque alcanzó una altura de unos 3 metros y giró sobre sí mismo 90º.
El segundo vuelo se produjo apenas unos días después, el 22 de abril, y consistió en un vuelo de apenas 51,9 segundos y se elevó 5 metros. Tras levantarse, a las 11.30 hora española, se inclinó ligeramente para desplazarse de manera lateral dos metros. Después, se detuvo, giró y retrocedió esos dos metros. Y aterrizó sin ningún tipo de problema. A pesar de la brevedad, todo salió según lo esperado por la NASA y el Laboratorio de Propulsión a Chorro (JPL, por sus siglas en inglés).
El tercero vuelo ha sido durante la madrugada del domingo, 25 de abril. En un vídeo de la NASA y el JPL se puede ver a Ingenuity elevarse del suelo algo más de tres metros, según los expertos de la misión. Y recorrer 50 metros hacia delante. La velocidad máxima en este vuelo fue de 2 m/s (7,2 km/h), Llega a salir de cámara durante un rato, pero luego vuelve para su lugar de origen y aterriza.
El cuarto vuelo sufrió una modificación: 29/04/2021 – 23:42 El mini helicóptero de la NASA Ingenuity en Marte Handout NASA/JPL-Caltech/MSSS/ASU/AFP. Washington (AFP). El helicóptero Ingenuity de la NASA no pudo realizar este jueves su cuarto vuelo programado en Marte por un error de software, informó la agencia espacial estadounidense, que prometió volver a intentarlo al día siguiente. El 30.04.2021 Ingenuity completa con éxito su cuarto vuelo en Marte y comienza una nueva misión de exploración. El helicóptero se alejó 133 metros a 5 metros de altura y luego regresó, desplazándose un total de 266 metros. Además, estuvo un total de 117 segundos en el aire, superando el límite de 90 segundos que el equipo se había autoimpuesto antes del lanzamiento. Ahora la NASA tiene preparada para la aeronave un nuevo objetivo: demostrar las operaciones de vuelo que las futuras naves aéreas podrían utilizar.
En vista de los resultados se propuso que el helicóptero realizase hasta un sexto vuelo, durante un mes adicional de trabajo. Si después del mes adicional Ingenuity sigue funcionando, se podrá prorrogar su vida útil en plazos de un mes, pero solo hasta agosto.
El quinto vuelo fue el 08/05/2021 – El helicóptero Ingenuity de la NASA en Marte ha realizado su primer vuelo de ida desde el aeródromo que ha usado en sus primeros vuelos hasta un nuevo emplazamiento a 129 metros al sur en el cráter Jezero. En su quinto vuelo en el Planeta Rojo, Ingenuity se desplazó a la vertical de su nuevo emplazamiento, subió a un récord de altitud de 10 metros y capturó imágenes en color de alta resolución de la zona antes de aterrizar.
El sexto vuelo fuel el 28/05/2021 – Fue un éxito, pero con algunos problemas. Pese a que la aeronave empezó a experimentar problemas de «sincronización«, con cambios de velocidad, y movimientos de balanceo y cabeceo, varios subsistemas (el sistema de rotor, los actuadores y el sistema de energía) respondieron de forma que el helicóptero se mantuvo volando hasta aterrizar de manera segura.
El séptimo vuelo. El helicóptero Ingenuity de la NASA completaba su séptimo vuelo en Marte el 8 de junio de 2021. Durante él se desplazó 106 metros en dirección sur. Y fue un vuelo absolutamente nominal. Lo que quiere decir que fue un vuelo aburrido. Si es que se puede decir que hacer volar un cacharro a motor en Marte es aburrido, claro. Esto supone una bienvenida diferencia respecto al sexto vuelo, en el que un error en la captura de imágenes de la cámara de navegación dio un buen susto al provocar grandes oscilaciones en el vuelo de Ingenuity.
El octavo vuelo. El helicóptero Ingenuity de la NASA en Marte ha completado con éxito su octavo vuelo este 22 de junio de 2021, capturando su propia sombra en esta imagen. Voló por el cráter Jezero durante 77,4 segundos y viajó 160 metros hasta un nuevo punto de aterrizaje a unos 133,5 metros de distancia del rover Perseverance. Por otra parte, el rover Perseverance ha captado una secuencia de imágenes que muestran cómo el viento arrastra el el polvo en la superficie del cráter Jezero.
En su noveno vuelo, el helicóptero Inge nuity, muestra un terreno intrigante en Marte. El noveno vuelo del dron (05/07/2021) capturó imágenes que ayudarán al equipo del rover Perseverance a planificar su trabajo científico. No sólo ha batido todos los récords de distancia y duración del vuelo –625 metros y 2 minutos y 46 segundos en el aire– sino que además ha validado la idea de que un dispositivo de este tipo puede actuar como explorador para un rover y permitirnos ver sitios a los que el vehículo terrestre no puede llegar. Y es que Ingenuity ha sobrevolado un campo de dunas que está en una zona bautizada como Séítah que Perseverance está evitando cuidadosamente porque nadie quiere que se quede atascado allí.
nuity, muestra un terreno intrigante en Marte. El noveno vuelo del dron (05/07/2021) capturó imágenes que ayudarán al equipo del rover Perseverance a planificar su trabajo científico. No sólo ha batido todos los récords de distancia y duración del vuelo –625 metros y 2 minutos y 46 segundos en el aire– sino que además ha validado la idea de que un dispositivo de este tipo puede actuar como explorador para un rover y permitirnos ver sitios a los que el vehículo terrestre no puede llegar. Y es que Ingenuity ha sobrevolado un campo de dunas que está en una zona bautizada como Séítah que Perseverance está evitando cuidadosamente porque nadie quiere que se quede atascado allí.
En su décimo vuelo. Ingenuity, el helicóptero que acompaña a Perseverance en Marte, ha realizado su décimo vuelo la madrugada del 25 de julio. Ahora ha marcado un hito que la agencia espacial no esperaba; pero que demuestra que Ingenuity todavía tiene mucho que aportar a la exploración en Marte. Con cada nuevo vuelo, la NASA ha tratado de ir probando los límites de Ingenuity a la par que miraba desde el cielo la superficie de Marte, según han explicado en Business Insider. En este décimo vuelo, el pequeño helicóptero se alzó hasta los 12 metros y voló hasta un conjunto de rocas conocido como Raised Ridges. Este nuevo vuelo, además, marcó otro nuevo hito en la vida de Ingenuity en Marte. Y es que el pequeño helicóptero ha completado ya su primera milla (1,6 kilómetros) de recorrido en el cielo del planeta vecino.
Su undécimo vuelo. Washington, 6 ago. El helicóptero Ingenuity culminó con éxito su undécimo vuelo de 130,9 segundos en los que recorrió unos 380 metros en el cráter Jezero del planeta Marte, anunció hoy la NASA. (4 agosto de 2021). De acuerdo con un mensaje en Twitter de la Administración Nacional de Aeronáutica y el Espacio de Estados Unidos (NASA), la aeronave aterrizó en un lugar donde vuelos de reconocimiento con imágenes aéreas ayudarán al rover Perseverance en su búsqueda de vida microbiana ancestral en dicho mundo. La nueva base de operaciones, que se encuentra aproximadamente a 385 metros al noroeste de la ubicación anterior en el conocido planeta rojo se convertirá en el área de preparación para al menos un vuelo de reconocimiento de un área geológicamente desconocida denominada Sur de Seitah.
Su duodécimo vuelo. Realizado el 19 Agosto 2021. El helicóptero Ingenuity de la NASA ha completado con éxito su vuelo número 12 en Marte. Este último vuelo ha sido además uno de los más ambiciosos y peligrosos: Ingenuity abandonaba el vuelo sobre la planicie y se adentraba en un paisaje con desniveles, algo que podría haber sido un problema para sus sensores. No lo fue, y Ingenuity sigue haciendo historia. Ingenuity explora desde el aire para chivarle los datos a Perseverance. En el JPL de la NASA explicaban como Ingenuity ha comenzado a explorar la región ‘South Séítah’. Para ello realizó un vuelo con una altura de 10 metros, y se desplazó cerca de 450 metros durante los 169 segundos que se mantuvo en el aire.
Su decimotercero vuelo. Realizado el 6 Septiembre 2021. Ingenuity realiza el vuelo más bajo y lento en Marte, consiguiendo así fotografías más detalladas del suelo marciano. La idea de esto es combinar las imágenes de ambos vuelos para realizar una mapeado 3D de la zona con más detalles topográficos. Con ello podrán planear mejor también qué hacer en el futuro con el rover Perseverance y por dónde dirigirlo a explorar. Otro detalle interesante es el tiempo del vuelo. O, más específicamente, la velocidad de vuelo. Mientras que en el vuelo número 12 la distancia fue de aproximadamente 450 metros, en esta ocasión la distancia ha sido apenas de 210 metros. Sin embargo, el tiempo de vuelo ha sido aproximadamente el mismo, un total de 161 segundos frente a los 169 segundos del vuelo número 12.
Ingenuity concluye con éxito décimocuarto vuelo en Marte. October 27, 2021. El helicóptero Mars Ingenuity de la NASA se recupera después de una anomalía en el vuelo 14. El helicóptero Ingenuity detectó su propia sombra durante su breve vuelo número 14. El 30/09/2021, el helicóptero Ingenuity de la NASA en Marte canceló su vuelo número 14 tras detectar una anomalía en algunos de los pequeños motores que rigen las palas que hacen volar la aeronave. El helicóptero originalmente iba a intentar su decimocuarto vuelo antes de la conjunción solar de Marte, pero una anomalía le impidió despegar. El exitoso salto posterior a la conjunción sugiere que Ingenuity está en buena forma y listo para continuar su misión pionera.
Ingenuity concluye con éxito décimoquinto vuelo en Marte. 10/11/2021. Y después del decimoquinto vuelo, el cual fue un poco más corto de lo que la NASA tenía planeado (130 segundos y 400 metros), el Ingenuity ya vuelve al lugar donde emprendió su primer vuelo, es decir, su punto de partida. El objetivo final de este helicóptero no es solo extraer minerales del planeta rojo sino también explorar y ver esas zonas a las que el Perseverance no puede llegar. Para hacer ver la evolución de los vuelos del Ingenuity, el primero tan solo fue un vuelo estacional de 3 metros de altura y 40 segundos que cada vez han ido complicando más y más con cada vuelo. Así hasta llegar al 14º, en el que el pequeño helicóptero voló a 2700 rpm, lo cual demuestra que podrá volar sin complicaciones cuando el clima en Marte sea mucho más frío y el aire más fino.
Ingenuity concluye con éxito décimosexto vuelo en Marte. 20/11/2021. Vuelo dieciséis: 20 de noviembre de 2021 viajando 381 pies (116 m) por un total de 108 segundos a un estimado de 3 mph. Durante este vuelo hacia el NE, sobrevoló Raised Ridges y luego aterrizó cerca de Séítah Sud.
Ingenuity concluye con éxito décimoseptimo vuelo en Marte. 05/12/2021. Ingenuity vuela de nuevo sobre Marte: ya lleva 17 trayectos, aunque este último ha dado un pequeño susto. La comunicación entre Ingenuity y el rover Perseverance se interrumpió mientras el helicóptero descendía. Todos datos de la telemetría han indicado posteriormente que el vuelo se completó con éxito, y la NASA ha explicado cuál pudo ser la causa de esa pérdida momentánea del enlace entre ambos vehículos. Hubo dos factores que pudieron causar el problema. El primero, el terreno: al descender, Ingenuity pudo acabar tras una pequeña colina de cuatro metros de altura que el equipo ha denominado ‘Bras’. El segundo, la orientación del rover, que cambió debido a nuevos objetivos para su exploración científica. “En el momento en el que el Vuelo 17 estuvo preparado para su ejecución, Perseverance había ido a otra nueva ubicación y había aparcado en una orientación compleja para las comunicaciones de radio”. Los últimos datos revelan que Ingenuity está en perfecto estado.Con un peso de 1,8 kilogramos, este helicóptero superó todas las expectativas iniciales, y ya ha recorrido una distancia equivalente a 3.592 metros, volando tan alto como 12 metros y tan rápido como 5 metros por segundo. El recorrido de 117 segundos, del 5 de diciembre, le valió al helicóptero en Marte el récord de 30 minutos y 48 segundos, una cifra que superará con sus próximos vuelos. Durante este último recorrido, la nave se acercó a su aeródromo original, “Wright Brothers Field”,
Ingenuity concluye con éxito décimoctavo vuelo en Marte. 17/12/2021. La NASA anunció este viernes que su helicóptero Ingenuity completó con éxito su 18° vuelo sobre Marte. El recorrido fue de 230 metros, a una velocidad de 2,5 metros por segundo, y tuvo una duración de 124,3 segundos. Al igual que con el vuelo anterior, el 18 ampliará los límites del alcance y el rendimiento de radio de Ingenuity. Para brindarle la mejor oportunidad de mantener un enlace durante el aterrizaje, el equipo de Mars Helicopter ha modificado la secuencia de vuelo para comunicarse en un modo de baja velocidad de datos, lo que proporcionará un impulso adicional en la intensidad de la señal al enlace de radio.
Ingenuity concluye con éxito décimonoveno vuelo en Marte. 09/02/2022. Ingenuity vuela en Marte por primera vez este año 2022.Primera vez este año y la decimonovena desde que está en Marte. El helicóptero Ingenuity de la NASA en Marte, primera aeronave a motor de operación controlada en otro mundo, ha permanecido en el aire durante más de minuto y medio y cubriendo unos 62 metros durante su vuelo. Tras más de un mes de retraso debido al polvo en el ambiente. Tal y como estaba previsto, el vuelo sacó a Ingenuity de una zona accidentada del suelo de Jezero conocida como South Séítah, sobre una cresta y hacia una meseta. Ingenuity permaneció en el aire durante 99,98 segundos y cubrió unos 62 metros durante su singladura. (Fuente: NASA)
Ingenuity concluye con éxito vigésimo vuelo en Marte. 25/02/2022. Hace unos días el helicóptero Ingenuity completaba su vuelo número 20 en Marte. En él recorrió 391 metros a una velocidad de 4,4 metros por segundo. En total duró 130,3 segundos. Anteriormente una tormenta de arena ensució su cámara, algo que podía complicar las cosas y confundir los sensores de navegación, pero la NASA ya había previsto algo así y su software es capaz de ignorar ciertas regiones de las imágenes que se capturan. Tanto Ingenuity como Perseverance están volviendo hacia el punto de aterrizaje de ambos tras haber pasado casi un año explorando una zona al sur. Su nuevo objetivo está al noroeste.
Ingenuity concluye con éxito vigésimoprimer vuelo en Marte. 16/03/2022. El JPL ha anunciado que el Ingenuity ha realizado su 21 vuelo en el planeta rojo, recorriendo 370 metros durante el vuelo de 129 segundos de duración. El helicóptero ya ha recorrido más de 4,6 kilómetros desde su primer vuelo en abril de 2021. El Ingenuity se desarrolló con el plan original de no usarse en más de cinco vuelos en un solo mes, sin embargo, dado el buen rendimiento que está proporcionando, la misión se ha ampliado, y ahora se utiliza también como explorador para examinar el terreno por el que el rover Perseverance debe pasar. El ingeniero Matt Golombek aclara que el propio helicóptero no ha mostrado signos de desgaste tras casi un año de vuelo en Marte, y que está, “como nuevo”. El helicóptero, que utiliza energía solar, tampoco tiene consumibles que limiten su vida útil. “No hay nada consumible ni nada que nos impida seguir operando mientras el helicóptero se mantenga sano.” La NASA ha anunciado que la misión de Ingenuity va a ser extendida hasta septiembre de 2022.
Ingenuity concluye con éxito su vigésimosegundo vuelo en Marte. 20/03/2022. El Ingenuity, que pesa 1,8 kilogramos, se mantuvo en el aire durante 101,4 segundos y alcanzó una altura máxima de 10 metros durante la salida, que tuvo lugar el domingo (20 de marzo), según un tweet publicado el lunes (21 de marzo) por el Jet Propulsion Laboratory (JPL) de la NASA en el sur de California, que gestiona la misión del Ingenuity. Los responsables del rover están dirigiendo actualmente a Perseverance hacia una parte accesible del antiguo delta, y las observaciones de Ingenuity les están ayudando a elegir la mejor ruta, han dicho los miembros del equipo de la misión.
Ingenuity concluye con éxito su vigésimotercer vuelo en Marte. 25/03/2022. La NASA ha celebrado el logro avisando de cómo esta nueva incursión ha hecho que Ingenuity vuele durante 129 segundos y recorra 358 metros para explorar el cráter Jezero, que será la siguiente zona a la que el rover Perseverance se dirigirá para continuar sus experimentos científicos. Hace semanas que los vuelos de Ingenuity están dirigidos a ayudar a la NASA a tener muchos más detalles de la superficie marciana y de cuál puede ser el mejor camino para que Perseverance llegue a esa zona. El anuncio insinuó que el vehículo robótico se dirigirá pronto a otra región marciana con la esperanza de buscar rastros de la historia. Aparte de eso, se vio que la estructura geológica de esta tierra era un lugar perfecto para la vida emergente. Esto hizo pensar a los expertos que esta región en particular fue una vez un lugar de residencia para cualquier señal de vida.
Ingenuity concluye con éxito su vigésimocuarto vuelo en Marte. 03/04/2022. En el vuelo 24 del 3 de abril de 2022, los rotores de Ingenuity volvieron a girar a 2500 rpm ahora que el aire poco denso del verano local deja paso al aire más denso del otoño —y, de paso, es posible realizar vuelos más prolongados, puesto que los motores no se calientan tan rápidamente—,
Ingenuity concluye con éxito su vigésimoquinto vuelo en Marte. 08/04/2022. En el vuelo 25 del 8 de abril (sol 403), el helicóptero recorrió 704 metros hasta el Aeródromo Q, a una velocidad de 5,5 metros por segundo, la distancia más larga cubierta hasta el ahora. En los próximos meses, Ingenuity ayudará a Perseverance en el estudio del delta de Jezero y se espera que sus datos sirvan para decidir cuál de los dos canales del delta es el ideal para que el rover suba desde el fondo del cráter. Para ello, un nuevo software le permitirá volar hasta los 15 metros de altitud. Hace un año nadie hubiese previsto que Ingenuity fuera capaz de aguantar tanto tiempo en Marte. Ahora, por el contrario, nadie duda de que seguirá activo mucho tiempo. La cámara de navegación ha sido programada para desactivarse siempre que el helicóptero se encuentre a 1 metro de la superficie. Esto ayuda a garantizar que el polvo levantado durante el despegue y el aterrizaje no interfiera con el sistema de navegación mientras rastrea las características en el suelo.
Ingenuity concluye con éxito su vigésimosexto vuelo en Marte. 19/04/2022. Aterrizar en Marte es muy complicado porque el planeta rojo tiene atmósfera, lo que implica que debes usar un escudo térmico para proteger tu nave y, de paso, puedes usar un paracaídas. Pero esta atmósfera es muy poco densa —menos del 1% de la terrestre—, por lo que no es posible frenar una nave para que realice un aterrizaje suave empleando paracaídas exclusivamente y hay que recurrir a otro s medios —retrocohetes o airbags—. Pero, ¿qué pasaría si solo empleamos paracaídas? ¿Cómo quedaría una sonda espacial? Pues ya podemos dejar de imaginar, porque el 19 de abril el helicóptero marciano Ingenuity sobrevoló durante su 26º vuelo el paracaídas y el escudo térmico trasero —backshell— de la cápsula que lo llevó, junto al rover Perseverance, a la superficie marciana. El escudo térmico trasero y el paracaídas, acabaron en el suelo del cráter Jezero el 18 de febrero de 2021 y, desde entonces, allí han permanecido inmóviles, aunque el paracaídas se ha movido ligeramente debido a la débil brisa marciana.
s medios —retrocohetes o airbags—. Pero, ¿qué pasaría si solo empleamos paracaídas? ¿Cómo quedaría una sonda espacial? Pues ya podemos dejar de imaginar, porque el 19 de abril el helicóptero marciano Ingenuity sobrevoló durante su 26º vuelo el paracaídas y el escudo térmico trasero —backshell— de la cápsula que lo llevó, junto al rover Perseverance, a la superficie marciana. El escudo térmico trasero y el paracaídas, acabaron en el suelo del cráter Jezero el 18 de febrero de 2021 y, desde entonces, allí han permanecido inmóviles, aunque el paracaídas se ha movido ligeramente debido a la débil brisa marciana.
Restos alienígenas en Marte: el escudo térmico trasero y el paracaídas de Mars 2020 vistos por Ingenuity 19 de abril de 2022 (NASA/JPL-Caltech).
Ingenuity concluye con éxito su vigésimoseptimo vuelo en Marte. 23/04/2022. Intrigante descubrimiento del Ingenuity en Marte. El dron de la NASA en el planeta rojo capta unas imágenes que muestran rocas inclinadas poco comunes. El hallazgo puede ayudar a conocer la historia del cráter de Jezero. El helicóptero Ingenuity de la NASA en Marte ha inspeccionado una intrigante cresta cerca del antiguo delta fluvial en el cráter Jezero. El sistema ha captado imágenes de un escarpe (pendiente o inclinación muy pronunciada de un terreno), una característica geológica de interés porque los datos recopilados desde la órbita y a distancia por Perseverance indican que es el límite entre las dos principales unidades rocosas en el suelo del cráter. Las imágenes, capturadas el 23 de abril, durante el vuelo 27 del pequeño helicóptero, se tomaron a petición del equipo científico del rover Perseverance Mars, que quería ver más de cerca el afloramiento inclinado. Ingenuity “no solo proporciona imágenes desde una perspectiva aérea, sino que permite a nuestro equipo estar en dos lugares a la vez en Marte”, dijo en un comunicado Ken Farley de Caltech, cient ífico del proyecto de Perseverance.
ífico del proyecto de Perseverance.
Ingenuity concluye con éxito su vigésimooctavo vuelo en Marte. 29/04/2022. El Vuelo 28, un vuelo de 400 metros que duró dos minutos y medio. Ahora la NASA se pregunta si será la última. Luego, la NASA hizo algo inusual: ordenó a los diligentes controladores de la misión que pasaran la mayor parte del 5 de mayo escuchando las señales del helicóptero. Ingenuity vuela de forma autónoma, ya que es imposible pilotarlo en tiempo real porque aunque viajan a la velocidad de la luz las órdenes tardarían, en el mejor de los casos, 3 minutos en llegar a Marte desde la Tierra. En el peor –cuando Marte está más lejos– hasta 22 y medio. Y de media 12 minutos y medio. Así que desde el control de la misión le indican hacia dónde volar, durante cuanto tiempo, y a qué velocidad. Y su sistema de control y guiado –de código abierto– lleva a cabo el vuelo, escogiendo un lugar de aterrizaje adecuado gracias al análisis que hace en tiempo real del suelo sobre el que está. No está nada mal para estar fabricado con hardware comercial que te puedes comprar casi en cualquier tienda.
Ingenuity concluye con éxito su vigésimonoveno vuelo en Marte. 27/05/2022. Ingenuity logra nuevo récord de vuelo en la superficie de Marte. El dispositivo alcanzó el vuelo más rápido y el más lejano desde que fue lanzado a la órbita espacial el pasado 30 de julio de 2020. De acuerdo a lo informado por la NASA, este artefacto logró una velocidad de 5.5 metros por segundo en los que cubrió una distancia de 704 metros. Así las cosas, alcanzó el vuelo más rápido y el más lejano desde que fue lanzado a la órbita espacial el pasado 30 de julio de 2020. “Para nuestro vuelo sin precedentes, la cámara de navegación que mira hacia abajo de Ingenuity nos brindó una sensación impresionante de lo que se sentiría al deslizarse a 10 metros sobre la superficie de Marte a 19 kilómetros por hora“, manifestó Teddy Tzanetos, líder del equipo de Ingenuity. Una vez se puso en marcha, partió hacia el suroeste. Allí pasa por unas ondas de arena, después pasa por un grupo de rocas marcianas y termina captando imágenes de un terreno llano. El video tuvo una duración de 161.3 segundos; sin emba rgo, tras acelerarlo cinco veces el tiempo final fue de 35 segundos. “Ingenuity primero vuela sobre un grupo de ondas de arena y luego sobre varios campos de rocas. Finalmente, debajo aparece un terreno relativamente llano y sin rasgos distintivos, lo que proporciona un buen lugar para aterrizar”, señala la agencia. (Puede leer: Así se escuchan los nuevos sonidos en Marte que descubrió el Perseverance). Los datos en tiempo real de Ingenuity son enviados por los sensores que están a bordo, y la cámara de navegación, una unidad de medición inercial y un telémetro láser guían al helicóptero en el vuelo, haciendo que el helicóptero reaccione al paisaje mientras ejecuta sus comandos.
rgo, tras acelerarlo cinco veces el tiempo final fue de 35 segundos. “Ingenuity primero vuela sobre un grupo de ondas de arena y luego sobre varios campos de rocas. Finalmente, debajo aparece un terreno relativamente llano y sin rasgos distintivos, lo que proporciona un buen lugar para aterrizar”, señala la agencia. (Puede leer: Así se escuchan los nuevos sonidos en Marte que descubrió el Perseverance). Los datos en tiempo real de Ingenuity son enviados por los sensores que están a bordo, y la cámara de navegación, una unidad de medición inercial y un telémetro láser guían al helicóptero en el vuelo, haciendo que el helicóptero reaccione al paisaje mientras ejecuta sus comandos.
Restos de una manta térmica, fotografiados el 15/06/2022, a 2 km. del lugar de aterrizaje.
La NASA le da vacaciones de invierno al helicóptero Ingenuity 14 de Julio de 2022. Ingenuity sobre Marte. Se ven las rodadas de Perseverance tras apartarse de él – NASA/JPL-Caltech. La NASA acaba de anunciar que Ingenuity no volverá a volar hasta principios de agosto. El motivo es que en la mitad de Marte en la que está el pequeño helicóptero es invierno y cada vez hay menos horas de luz y más polvo en la atmósfera. Esto dificulta el trabajo del panel solar que tiene que cargar sus baterías. Así que han decidido darle vacaciones en lo que a la campaña de vuelos se refiere hasta que pase lo peor del invierno. Eso permitirá concentrar la electricidad que produzca el panel en los calentadores que le permitirán sobrevivir al frío. Para evitar que se acumule demasiado polvo en el panel, activará sus rotores de vez en cuando para que las vibraciones lo limpien.
Ingenuity concluye con éxito trigésimo vuelo en Marte. 20/08/2022. Tras casi darlo por perdido, Ingenuity realiza su vuelo número 30 en Marte con éxito. Ingenuity sigue batiendo récords a pesar de casi perderse en mayo. Tras una necesaria hibernación, ha podido realizar un vuelo corto.
Ingenuity vuelve del mundo de los sueños
Afortunadamente el plan parece haber funcionado y el pasado día 20 el helicóptero hacía su vuelo número 30. Fue un vuelo corto y sencillo en el que se elevó cinco metros, se desplazó dos, y volvió a aterrizar a los 33,3 segundos. Está muy por debajo de su vuelo 25, en el que estableció récords de distancia y duración con 704 metros y 161,3 segundos Pero demuestra que todo a bordo funciona correctamente. Así que en las próximas semanas, según vaya mejorando la meteorología, Ingenuity irá haciendo vuelos cada vez más largos en su función de explorador avanzado para el rover Perseverance. El vuelo número 30 de Ingenuity se ha llevado a cabo con dos objetivos. Por un lado, mover el helicóptero para que se active y libere parte del polvo que se ha acumulado sobre él en estos dos meses de letargo. Es un problema que se acumule mucho polvo, ya que puede afectar a su electrónica y, además, interfiere en la capacidad de sus placas solares para tomar las radiaciones solares. Por otro lado, se ha llevado a cabo un vuelo de salto corto, que serán los que se realicen mayoritariamente cuando se envíen más helicópteros como él a Marte. El objetivo es que transporten hasta la nave las muestras extraídas por los rover que tendrán que enviarse de nuevo a la Tierra. Para ello, no se necesitan vuelos largos y un ensayo como este es más que suficiente. Es cierto que no podría haber sido más larga, pues sus baterías solares apenas pueden cargarse un poco durante el día. No debemos olvidar que aún se están alcanzando en Marte temperaturas de hasta -86ºC por la noche. Pero tampoco se necesitaba nada más.
Ingenuity concluye con éxito trigésimo primer vuelo en Marte. 06/09/2022. El helicóptero de Marte de la NASA realiza su vuelo más largo. El Ingenuity completó su vuelo número 31 en el planeta rojo el 6 de septiembre, informó el miércoles el Laboratorio de Propulsión a Chorro (JPL), que supervisa la actual misión a Marte. El helicóptero, viajó durante 319 pies (97,2 metros) a una altitud de 33 pies (10 metros), dijo JPL en un tweet. La agencia aún no ha comentado con más detalle sobre el vuelo. La salida del martes fue la segunda desde el 11 de junio, después de lo cual el equipo de la misión dejó en tierra a Ingenuity debido a un aumento en las tormentas de polvo y las temperaturas estacionales amargamente frías. Ingenuity se dirige al delta del río dentro del cráter Jezero, donde se reunirá con el rover Perseverance, que continúa su misión de recolectar muestras de suelo marciano para regresar a la Tierra para que los científicos puedan estudiar el material en busca de evidencia de vida microbiana antigua en el planeta distante. El helicóptero ha estado ayudando utilizando su cámara a bordo para obtener imágenes de áreas de interés para que el equipo pueda ver si vale la pena enviar a Perseverance para una mirada más cercana. También está mapeando el terreno, lo que permite a los controladores usar los datos para crear las rutas más seguras para que Perseverance las tome. El ingenio se ha desempeñado tan bien que la NASA anunció recientemente que tiene la intención de construir versiones más avanzadas de la máquina voladora similar a un dron para futuras misiones planetarias.
Ingenuity concluye con éxito trigésimo segundo vuelo en Marte. 17/09/2022. Ingenuity completó su vuelo número 32 sobre la superficie de Marte. El vuelo duró 55 segundos. La imagen fue tomada con su cámara de navegación. En la esquina superior derecha se ve una de sus patas y en la esquina inferior izquierda su sombra.
Ingenuity concluye con éxito trigésimo tercer vuelo en Marte. 24/09/2022. Misteriosas imágenes del vuelo 33 de Ingenuity revelan un objeto extraño; la NASA investiga qué es. La aeronave viajó unos 111 m antes de aterrizar, y su vuelo duró poco más de 55 segundos.
4 octubre, 2022. ¿De qué se trata este extraño objeto en Marte? Lo captan en video | Foto: NASA. Durante el vuelo 33, la cámara de navegación del Ingenuity Mars Helicopter de la Administración Nacional de Aeronáutica y el Espacio (NASA) capturó imágenes en las que se aprecia una pequeña pieza de escombro de objetos extraños (FOD). El hallazgo quedó registrado en video.
De acuerdo con la NASA, el suceso ocurrió el pasado 24 de septiembre de 2022. El FOD se ve al lado de una de las patas de aterrizaje del helicóptero y cómo se aleja después. Este objeto misterioso no era visible en las imágenes de la Cámara de Navegación (NavCam) del vuelo anterior, es decir, el número 32. La Agencia detalló que toda la telemetría del vuelo, así como una búsqueda y transferencia posteriores al vuelo son nominales y no muestran indicios de daños en el vehículo, aunque todavía no logran definir exactamente de qué se trata en realidad. Gracias a la NavCam, se puede ver las imágenes del objeto con forma de tela durante la excursión aérea, mostrando el despegue del helicóptero con los escombros colgando en una de sus patas, pero a medida que Ingenuity se movía por el aire, los desechos se desprendieron del módulo de aterrizaje.
Ingenuity concluye con éxito trigésimo cuarto vuelo en Marte. 22/11/2022. El vuelo 34 de Ingenuity fue corto pero significativo.
En comparación con algunos de los otros vuelos, el Vuelo 34 podría no resaltar especialmente. Ha sido más corto que el primer vuelo de Ingenuity; el exitoso vuelo de 18 segundos de ayer simplemente se elevó a poco más de 5 metros, se mantuvo en el aire y luego aterrizó. A pesar de la naturaleza simple del vuelo, el equipo está muy emocionado por lo que significa para el futuro de Ingenuity.
En vuelos anteriores, los pilotos de Ingenuity necesitaban encontrar aeródromos libres de rocas u otros obstáculos que pudieran dañar el vehículo al aterrizar. El cráter Jezero es un lugar rocoso, ¡así que ha sido difícil encontrar aeródromos seguros! Usando la cámara de navegación orientada hacia abajo de Ingenuity, esta actualización de software previene los riesgos al aterrizar. Durante el vuelo, Ingenuity identificará el lugar de aterrizaje visible más seguro. Al prepararse para aterrizar, Ingenuity se desviará hacia el lugar seleccionado. Esta capacidad permite que Ingenuity aterrice de forma segura en terrenos más rocosos que antes, proporcionando a nuestros pilotos muchos más sitios potenciales de aterrizaje.
El software de navegación de Ingenuity fue diseñado para asumir que el vehículo volaría sobre un terreno plano. Cuando el helicóptero vuela sobre un terreno como colinas, esta suposición de terreno plano hace que el software de navegación de Ingenuity piense que el vehículo está virando, lo que hace que Ingenuity comience a virar en un intento de contrarrestar el error. En vuelos largos, se deben tener en cuenta los errores de navegación causados por el terreno accidentado, lo que requiere que el equipo seleccione grandes aeródromos. Esta nueva actualización de software corrige esta suposición de terreno plano mediante el uso de mapas digitales de elevación del cráter Jezero para ayudar al software de navegación a distinguir entre cambios en el terreno y el movimiento del vehículo. Esto aumenta la precisión de Ingenuity, lo que permite a los pilotos apuntar a aeródromos más pequeños en el futuro.
Ingenuity concluye con éxito trigésimo quinto vuelo en Marte. 03/12/2022. Ingenuity bate récord de altitud de vuelo en Marte en su vuelo 35. El helicóptero Ingenuity de la NASA en Marte batió su propio récord de altitud en vuelo sobre el planeta rojo en su vuelo 35, el 3 de diciembre, alcanzando los 14 metros de altura. El récord anterior del pequeño helicóptero de 1,8 kilos fue de 12 metros logrado en tres vuelos anteriores a Marte, informó el JPL (Jet Propulsion Laboratory en su cuenta de Twitter.
Ingenuity cubrió unos 15 metros de distancia horizontal en el vuelo del sábado, que duró 52 segundos. El helicóptero ahora ha viajado un total de 7.407 metros y ha permanecido en el aire durante 59,9 minutos en sus 35 salidas a Marte, según el registro de vuelo de la misión. El vuelo del sábado fue el primero de Ingenuity desde el 22 de noviembre y solo el segundo que ha realizado desde una importante actualización de software. Esa actualización, que tardó varias semanas en instalarse, “brinda a Ingenuity dos nuevas capacidades importantes: evitación de peligros al aterrizar y el uso de mapas digitales de elevación para ayudar a navegar”, escribieron los miembros del equipo de la misión en una publicación de blog a fines del mes pasado.
El panel solar carga las baterías de iones de litio, proporcionando suficiente energía para un vuelo de 90 segundos por día marciano.
Ingenuity concluye con éxito trigésimo sexto vuelo en Marte. 10/12/202. Mars Helicopter Sol 642 – Cámara de navegación: Ingenuity Mars Helicopter de la NASA adquirió esta imagen usand o su cámara de navegación. Esta cámara está montada en el fuselaje del helicóptero y apunta directamente hacia abajo para rastrear el suelo durante el vuelo. Esta imagen fue adquirida el 10 de diciembre de 2022 (Sol 642 de la misión del rover Perseverance) a la hora solar media local de 16:31:22. Esta fue la fecha del vuelo 36 de Ingenuity. Créditos: NASA/JPL-Caltech. El helicóptero Ingenuity supera la hora de vuelo en Marte.
o su cámara de navegación. Esta cámara está montada en el fuselaje del helicóptero y apunta directamente hacia abajo para rastrear el suelo durante el vuelo. Esta imagen fue adquirida el 10 de diciembre de 2022 (Sol 642 de la misión del rover Perseverance) a la hora solar media local de 16:31:22. Esta fue la fecha del vuelo 36 de Ingenuity. Créditos: NASA/JPL-Caltech. El helicóptero Ingenuity supera la hora de vuelo en Marte.
El helicóptero Ingenuity de la NASA en Marte ha realizado su vuelo número 36 en el cráter Jezero, que se prolongó 60,5 segundos, lo que eleva a una hora y un minuto su tiempo total en el aire marciano. Este vuelo, de 110 metros, se produjo justo una semana después de que el Ingenio estableciera un nuevo récord de altitud, al elevarse 14 metros sobre el suelo del cráter Jezero de Marte el 3 de diciembre, llevando el tiempo de vuelo total a 59,9 minutos. El helicóptero alcanzó un máximo de 10 metros en el vuelo 36, según el diario de vuelo. Ingenuity, que pesa 1,8 kilos, aterrizó con el explorador Perseverance de la NASA en febrero de 2021, con la misión de demostrar que es posible volar con motor en Marte a pesar de la delgada atmósfera del planeta. El helicóptero superó ese objetivo principal durante una campaña de cinco vuelos en la primavera de 2021. A continuación, Ingenuity pasó a una misión ampliada en la que está ampliando los límites del vuelo en el Planeta Rojo y sirviendo de explorador para Perseverance. Según el diario de vuelo de Ingenuity, el helicóptero ha recorrido un total de 7.517 metros en sus 36 salidas y ha permanecido en el aire durante casi 61 minutos.
Ingenuity concluye con éxito trigésimo séptimo vuelo en Marte. 17/12/2022.
Lo cierto es que ha seguido haciéndolo, y el pasado 17 de diciembre efectuó su vuelo número 37. Últimamente los vuelos son especialmente cortos —no mucho más de 100 metros de distancia, apenas un minuto de duración— pero que siga realizándolos sigue siendo un regalo.
- Número de vuelo: 37
- Fecha de vuelo: NETO 17 de diciembre
- Duración del vuelo: 49 segundos
- Distancia de vuelo horizontal: 180 pies (55 metros)
- Velocidad de vuelo (horizontal): 6,7 mph (3 mps)
- Altitud máxima de vuelo: 33 pies (10 metros)
- Objetivo de vuelo: cambiar la posición del helicóptero y probar las nuevas capacidades del software de vuelo.
Ingenuity concluye con éxito su trigésimo octavo vuelo en Marte 04/01/2023
El Mars Helicopter In genuity de la NASA completó con éxito su vuelo número 38 el miércoles 4 de enero. Durante este vuelo, el pequeño helicóptero voló 363 pies (110 metros) sobre la superficie marciana durante 74,26 segundos a una altitud máxima de 33 pies (10 metros) para reposicionarse. Este fue el primer vuelo de Ingenuity en 2023.
genuity de la NASA completó con éxito su vuelo número 38 el miércoles 4 de enero. Durante este vuelo, el pequeño helicóptero voló 363 pies (110 metros) sobre la superficie marciana durante 74,26 segundos a una altitud máxima de 33 pies (10 metros) para reposicionarse. Este fue el primer vuelo de Ingenuity en 2023.
El pasado 8 de enero, el rover Perseverance le sacó una foto al cráter Jezero, pero también a su compañero de viajes marciano, al helicóptero Ingenuity. La vista muestra una amplia extensión rocosa de Jezero junto con algunas huellas de ruedas notables dejadas por el rover. Dunas de arena onduladas aparecen en la distancia.
«Ingenio en la vista más cercana / mejor que hemos visto en bastante tiempo, de manera segura en la zona de aterrizaje del vuelo 38 en el lado de una onda de arena poco profunda, ~ 280m NNE», tuiteó el usuario DejaSu. La NASA reconoció la robótica de larga distancia de Perseverance e Ingenuity. «El helicóptero de Marte y yo estamos más cerca de lo que hemos estado en mucho tiempo, y adivinen a quién vi descansando en una duna entre vuelos», tuiteó el equipo de Perseverance el miércoles. El mapa de la NASA de las ubicaciones actuales del rover y el helicóptero ofrece una buena visión de arriba hacia abajo del terreno marciano.
Ingenuity concluye con éxito su trigésimo noveno vuelo en Marte 11/01/2023
El Ingenuity realiza vuelos de prueba para demostrar que es posible el vuelo propulsado en la delgada atmósfera marciana. Hasta ahora, el pequeño helicóptero ha completado 39 vuelos de prueba. Según el diario de vuelo de la misión, el Ingenuity realizó su 39º vuelo marciano cubriendo 140 metros de terreno en el transcurso de casi 79 segundos. Hasta la fecha, el helicóptero ha volado un total de 7.830 m sobre Marte y ha permanecido en el aire durante más de 64 minutos, según el diario de vuelo de la misión. En esta fase de la misión, el helicóptero actúa como explorador para Perseverance, ayudando al equipo del rover a elegir las mejores rutas a través del accidentado paisaje de Jezero y a identificar afloramientos prometedores para estudiarlos en profundidad.
Ingenuity concluye con éxito su cuadragésimo vuelo en Marte 19/01/2023
El pasado día 19 el helicóptero Ingenuity completaba su vuelo número 40 en Marte. En él estuvo en el aire durante 91,62 segundos y recorrió 178 metros a una altura máxima de 10 metros. En total acumula 8.008 metros recorridos –sí, ocho kilómetros– y casi 66 minutos en el aire. Esto permitió que se desplazase desde el denominado Aeródromo Z al Aeródromo Beta. Ambos son, naturalmente, designaciones utilizadas por el equipo de la misión para referirse a lugares donde Ingenuity puede aterrizar. En su recorrido, sobrevoló algunas dunas antes de llegar a su destino.
Ingenuity concluye con éxito cuadragésimo primer vuelo en Marte 27/01/2023
Según el diario de vuelo de la misión, el Ingenuity realizó su 41º vuelo marciano cubriendo 183 metros de terreno en el transcurso de casi 109 segundos, a una altura de 10 m.
Ingenuity concluye con éxito su cuadragésimo segundo vuelo en Marte 04/02/2023
Según el diario de vuelo de la misión, el Ingenuity realizó su 42º vuelo marciano cubriendo 248 metros de terreno en el transcurso de 137,2 segundos, a una altura de 10 m. Esto permitió que se desplazase desde el denominado Aeródromo Beta al Aeródromo Gamma.
Ingenuity concluye con éxito su cuadragésimo tercer vuelo en Marte 16/02/2023
El helicóptero Ingenuity en Marte, primera aeronave a motor bajo control en otro mundo, ha completado su vuelo número 43, que ha sido el más largo en casi un año. Ingenuity viajó a lo largo de 390 me tros a través de la superficie marciana durante 145,99 segundos, y a 12 metros de altitud sobre el cráter Jezero de Marte, donde está desplegado junto al rover Perseverance, con el que llegó al planeta rojo hace ahora dos años, informa el JPL (Jet Propulsion Laboratory) en su cuenta de Twitter.
tros a través de la superficie marciana durante 145,99 segundos, y a 12 metros de altitud sobre el cráter Jezero de Marte, donde está desplegado junto al rover Perseverance, con el que llegó al planeta rojo hace ahora dos años, informa el JPL (Jet Propulsion Laboratory) en su cuenta de Twitter.
Imagen del suelo de Marte tomada por el helicóptero Ingneuity en su vuelo 43 NASA/JPL.
Según la previsión de este vuelo, el objetivo del vuelo fue reposicionar el aparato con un desplazamiento en dirección noroeste en el que tomó nuevas fotografías.
Ingenuity concluye con éxito el cuadragésimo cuarto vuelo en Marte 19/02/2023
Durante este vuelo, el pequeño helicóptero voló 1096 pies (334 metros) sobre la superficie marciana durante 141,3 segundos a una altitud máxima de 39 pies (12 metros) para reposicionarse.
Ingenuity concluye con éxito el cuadragésimo quinto vuelo en Marte 22/02/2023
Ingenuity capta la puesta de sol en Marte en pleno vuelo. El helicóptero Ingenuity de la NASA en Marte adquirió esta imagen espectacular de la puesta de sol en el cráter Jezero del planeta rojo utilizando su cámara en color de alta resolución.
 La imagen fue tomada el 22 de febrero de 2023 durante el vuelo número 45 de Ingenuity. La cámara en color de alta resolución de Ingenuity está situada 22 grados por debajo del horizonte. Por lo tanto, las imágenes transmitidas a la NASA desde el helicóptero de 1,8 kilos se centran principalmente en el suelo, en busca de características geológicas interesantes y posibles obstáculos. Ocasionalmente, sin embargo, un trozo de cielo marciano aparecerá en alguna de las fotografías. El helicóptero capturó una imagen de este tipo en su vuelo 45, pero con un protagonista aún más raro en el encuadre: el sol. La foto muestra el sol ligeramente por encima del horizonte de colinas en la distancia, en el día marciano 714 de Ingenuity, o sol. Los rayos que brillan en la fotografía ayudan a iluminar el ondulante paisaje extraterrestre de arena y rocas del cráter Jezero, y casi parece una foto que podría tomarse en un desierto de la Tierra.
La imagen fue tomada el 22 de febrero de 2023 durante el vuelo número 45 de Ingenuity. La cámara en color de alta resolución de Ingenuity está situada 22 grados por debajo del horizonte. Por lo tanto, las imágenes transmitidas a la NASA desde el helicóptero de 1,8 kilos se centran principalmente en el suelo, en busca de características geológicas interesantes y posibles obstáculos. Ocasionalmente, sin embargo, un trozo de cielo marciano aparecerá en alguna de las fotografías. El helicóptero capturó una imagen de este tipo en su vuelo 45, pero con un protagonista aún más raro en el encuadre: el sol. La foto muestra el sol ligeramente por encima del horizonte de colinas en la distancia, en el día marciano 714 de Ingenuity, o sol. Los rayos que brillan en la fotografía ayudan a iluminar el ondulante paisaje extraterrestre de arena y rocas del cráter Jezero, y casi parece una foto que podría tomarse en un desierto de la Tierra.
Durante este vuelo, el pequeño helicóptero voló 496 metros (162,7 pies) sobre la superficie marciana durante 144,5 segundos a una altitud máxima de 39 pies (12 metros) para reposicionarse. El vuelo fue una misión de reposicionamiento en preparación para dar más asistencia al rover Perseverance de la NASA mientras continúa explorando el cráter Jezero.
Ingenuity concluye con éxito el cuadragésimo sexto vuelo en Marte 25/02/2023
Durante este vuelo, el pequeño helicóptero voló 445 metros (1460 pies) sobre la superficie marciana durante 135,9 segundos a una altitud máxima de 39 pies (12 metros) para reposicionarse.
Ingenuity concluye con éxito el cuadragésimo septimo vuelo en Marte 09/03/2023
Durante este vuelo, el pequeño helicópte ro voló 440 metros (1444 pies) sobre la superficie marciana durante 146,1 segundos a una altitud máxima de 39 pies (12 metros) para reposicionarse.
ro voló 440 metros (1444 pies) sobre la superficie marciana durante 146,1 segundos a una altitud máxima de 39 pies (12 metros) para reposicionarse.
Perseverance graba el despegue de Ingenuity en su vuelo 47 en Marte. El helicóptero Ingenuity de la NASA en Marte ha sido grabado por una de las cámaras del rover Perseverance en el punto de partida de su vuelo número 47 en el cráter Jezero del Planeta Rojo.
Ingenuity concluye con éxito el cuadragésimo octavo vuelo en Marte 21/03/2023
Alcanza Ingenuity marca de 48 vuelos en Marte
El helicóptero Ingenuity graba su aterrizaje en el vuelo 48 en Marte
En la superficie de Marte, el rover Perseverance desplegó el helicóptero Ingenuity el pasado 3 de abril de 2021. Unos 720 días después, el Ingenuity logró completar su vuelo número 48, alcanzando una altitud de 12 m, viajando unos 398 m y permaneciendo en el aire durante 149.9 segundos, según el registro de vuelo de Ingenuity.
Con una envergadura (o aspa) de poco menos de 1.2 m y una masa de 1.8 kilogramos, lo que se traduce en 0.0033 gramos en Marte, Ingenuity es un explorador extraterrestre bastante pequeño. Especialmente en comparación con el último rover de Marte del tamaño de un automóvil de la NASA. Esto se puede lograr debido a que la atmósfera de Marte es extremadamente delgada, de solo el 1% de la densidad de la Tierra, por lo tanto, cualquier helicóptero que espere volar en Marte no solo debe mantener su peso bajo, sino también tener rotores capaces de proporcionar suficiente sustentación, de acuerdo con el portal Astronomy. Es por eso que los rotores de Ingenuity giran a una velocidad impresionante de 2,400 revoluciones por minuto (rpm), que es entre cinco y seis veces más rápido que las palas de un helicóptero promedio en la Tierra.
En total, Ingenuity ha pasado hasta ahora unos 84 minutos viajando unos 11,000 m sobre la superficie marciana. El helicóptero ha alcanzado una velocidad máxima de aproximadamente 21.6 km/h y una altitud máxima de 14 m.
máxima de 14 m.
El helicóptero alcanzó una altitud de 12 metros y viajó 398 metros durante 149,9 segundos. El vuelo se produjo en dirección noroeste a una velocidad de 4,65 metros por segundo. El objetivo fue el reposicionamiento del helicóptero y cubrir objetivos científicos de imágenes en el camino. La aeronave ha volado ya 11 kilómetros en total.
El rover Curiosity descubre un ‘fósil’ de dragón en Marte
El pasado 1 de abril, el rover Curiosity envió una sorprendente imagen de lo que se asemeja a un fósil con espinas. La astrobióloga Nathalie A. Cabrol dice al respecto que “llevo 20 años estudiando Marte, y es la cosa más bizarra que he visto“.
El rover Curiosity descubre un ‘fósil’ con espinas en Marte© Proporcionado por Computer
Ingenuity concluye con éxito el cuadragésimo noveno vuelo en Marte 02/04/2023
El helicóptero Ingenuity en Marte bate dos récords en su vuelo 49
El helicóptero Ingenuity de la NASA en Marte ha completado con éxito su vuelo número 49, estableciendo un nuevo récord de velocidad de vuelo de 6,5 metros por segundo y un récord de altitud de 16 metros. Este vuelo tuvo lugar el 2 de abril. Ingenuity, primera aeronave a motor de vuelo controlado en otro mundo, recorrió 282 metros en 142,7 segundos, informa la NASA.
El helicóptero estaba situado en el punto verde, y el rover con uno rojo en los lugares donde la comunicación no era posible. El punto amarillo muestra la posición de Perseverance justo antes del vuelo 50 de Ingenuity. Fuente: NASA/JPL-Caltech

Ingenuity concluye con éxito el quincuagésimo vuelo en Marte 13/04/2023
Cumplió su vuelo número 50 en el planeta rojo, informó la NASA este viernes (14.04.2023). La primera aeronave en otro planeta alcanzó la marca el pasado jueves, viajando más de 322,2 metros en 145,7 segundos. El helicóptero también logró un nuevo récord de altitud de 18 metros antes de aterrizar cerca del «Cráter Belva» de 800 metros de ancho. Con el vuelo número 50 en el libro de registros de la misión, el equipo de helicópteros planea realizar otro vuelo de reposicionamiento antes de explorar la región del «Fall River Pass» del cráter Jezero.
Ingenuity visto por Perseverance el 16 de abril de 2023 (sol 766) a 23 metros de distancia (NASA/JPL-Caltech/ASU/MSSS).
Ingenuity concluye con éxito el quincuagésimoprimer vuelo en Marte 22/04/2023
Durante este vuelo, el pequeño helicóptero voló 188 metros (617 pies) sobre la superficie marciana durante 136,9 segundos a una altitud máxima de 39 pies (12 metros) para reposicionarse. La velocidad alcanzada en esta ocasión fue de 4 metros por segundo.
Ingenuity aterrizó por primera vez en un terreno rocoso después de completar su vuelo número 50, pero recientemente, dicho dispositivo espacial fotografió al rover Perseverance en el cráter Belva durante el vuelo 51.
Como se puede observar en la fotografía de la noticia, la NASA explica en su blog que “el rover está en la parte superior izquierda de la imagen, estacionado en un afloramiento rocoso de tonos claros que el equipo científico llama ‘Echo Creek’. La sombra del helicóptero se puede ver en la colina rocosa en primer plano, justo a la derecha y debajo del centro de la imagen. Además, en la parte central inferior de la imagen se puede ver una pequeña pieza triangular de escombros del sistema de entrada, descenso y aterrizaje del rover“.
Por otro lado, la imagen de abajo es una vista am pliada del Perseverance, en la que aparecen las huellas que dejó el rover al hacer su recorrido por el planeta marciano.
pliada del Perseverance, en la que aparecen las huellas que dejó el rover al hacer su recorrido por el planeta marciano.
Mientras tanto, la siguiente fotografía es una vista ampliada de la pequeña pieza de escombros del rover. Pieza de escombros. NASA
Es motivo de celebración en el seno del Jet Propulsion Laboratory, laboratorio que maneja el destino de los robots marcianos, ya que el rover Perseverance ha podido encontrarse de nuevo con Ingenuity, tal y como muestra la NASA en su página web. Gracias al instrumento Mastcam-Z del rover, éste ha podido retratar al helicóptero de la NASA en un área del planeta rojo denominada como ‘Airfield Mu’ el día 14 de abril de este mismo año. Y la imagen del helicóptero aterrizando en dicho terreno no sería más que una anécdota interesante para los aficionados a la ciencia y el espacio, de no ser porque este aterrizaje ha sucedido por primera vez en terreno rocoso, marcando un hito en la exploración de Marte. Gracias a un algoritmo integrado en el sistema de guiado de Ingenuity, después de completar su vuelo número 50, el helicóptero pudo descansar sobre una superficie que aún esconde muchos secretos para el ser humano.
Trayecto de Perseverance (naranja) e Ingenuity (verde) hasta marzo de 2023 (NASA).

Ingenuity concluye con éxito el quincuagésimosegundo vuelo en Marte 26/04/2023
Durante este vuelo, el pequeño helicóptero voló 363 metros (1.191 pies) sobre la superficie marciana durante 145,0 segundos a una altitud máxima de 39 pies (12 metros) para reposicionarse. La velocidad alcanzada en esta ocasión fue de 3,70 metros por segundo.
Y cuando Ingenuity despegó para el vuelo 52, una colina presentó un obstáculo que impedía que el helicóptero y el rover se comunicaran entre sí.
“La parte del cráter Jezero que el rover y el helicóptero están explorando actualmente tiene mucho terreno accidentado, lo que hace que las interrupciones de las comunicaciones sean más probables”, dijo Josh Anderson, líder del equipo Ingenuity en JPL, en un comunicado. Según explica la agencia estadounidense, el rover actúa como “repetidor de radio entre el helicóptero y los controladores de la misión”. Dado que los de JPL ya esperaban una pérdida de conexión, planearon un ‘recontacto’ cuando el robot volviese a estar cerca de Ingenuity.
Ingenuity concluye con éxito el quincuagésimotercero vuelo en Marte 22/06/2023
Durante este vuelo, el pequeño helicóptero voló 142,5 metros (468 pies) sobre la superficie marciana durante 74,9 segundos a una altitud máxima de 16 pies (5 metros) para reposicionarse. La velocidad alcanzada en esta ocasión fue de 2,5 metros por segundo.
En su vuelo número 53, el helicóptero debía completar un vuelo de 136 segundos que incluía moverse 203 metros hacia el norte a una altitud de 5 metros, un descenso vertical a la mitad de la altitud y una última etapa en la que se elevaría 10 metros. Todo esto en teoría, claro, porque Ingenuity tuvo un problema a mitad de camino que le impidió completar la misión.
Como explica la NASA en una publicación, la pequeña máquina con hélices voló 142 metros cuando se activó su programa de contingencia de vuelo y realizó un aterrizaje de emergencia. El pequeño helicóptero surcó los cielos marcianos el 26 de abril para su vuelo número 52, pero perdió contacto con los controladores de la misión antes de aterrizar, creando un apagón de comunicaciones de un mes de duración.
Pero Ingenuity volvió a llamar a casa el 28 de junio, disipando cualquier preocupación potencial sobre la seguridad y el paradero de la primera aeronave en otro planeta. Sin embargo, sigue siendo mucho tiempo para que los humanos aquí en la Tierra confirmen que Ingenuity aterrizó a salvo. El vuelo tenía la intención de reposicionar el helicóptero y capturar imágenes de la superficie marciana. El equipo de la misión anticipó que podría ocurrir un corte de comunicación. Esto se debe a que el helicóptero Ingenuity se comunica con el control de la misión en el Laboratorio de Propulsión a Chorro de la NASA (JPL, por sus siglas en inglés) en Pasadena, California, transmitiendo todos los mensajes a través del rover Perseverance.
El equipo de Ingenuity cree que este aterrizaje de emergencia se produjo porque las imágenes de la cámara de navegación del helicóptero no se sincronizaban con los datos de su unidad de medición inercial (el aparato que mide la aceleración y la rotación del helicóptero), como explicaba la NASA.
“Desde el primer vuelo hemos incluido un programa llamado ‘LAND_NOW’ que fue diseñado para aterrizar el helicóptero sobre el suelo lo antes posible si este se encontraba con algunos escenarios fuera de lo normal”, explicó Teddy Tzanetos, líder del equipo del Ingenuity del Laboratorio de Propulsión a Chorro de la NASA en un comunicado. “Durante el vuelo 53, nos topamos con uno de esos escenarios, y el helicóptero funcionó según lo planeado y ejecutó un aterrizaje de emergencia inmediato”.
Una imagen captada por el rover Perseverance muestra una misteriosa roca con forma de dónut en la superficie de Marte.
El rover recoge muestras de rocas, rocas rotas y suelo (llamado regolito) para su posible retorno a la Tierra en una futura misión a Marte.
El “dónut” de Marte es uno de los últimos objetos captados a unos 100 metros de distancia en el delta del cráter Jezero por la SuperCam Remote Micro-Imager, una de las cámaras del rover que ayuda a los científicos a ver lo que hay en la superficie del planeta.
El equipo del Perseverance no ha hecho que el rover se acerque a la roca en forma de rosquilla para examinarla o tomar muestras de ella, por lo que se desconoce su composición y origen exactos, según Jim Rice, científico investigador adjunto de la Escuela de Exploración Terrestre y Espacial de la Universidad Estatal de Arizona. Rice, que forma parte del equipo de imágenes Mastcam-Z del rover, observó la roca por primera vez el 14 de junio.
El Mars Perseverance de la NASA captó esta imagen el 23 de junio en el cráter Jezero del planeta. (Crédito: NASA/JPL-Caltech/LANL/CNES/IRAP)
Los científicos tienen algunas hipótesis sobre cuál es el origen de la roca, y cuál no.
“No puedo decir con absoluta certeza que no sea un meteorito, pero creo que es muy poco probable”, dijo Rice. “La razón por la que lo digo es porque en esta región en la que estamos vemos muchas rocas que tienen este tipo de interiores huecos”.
Las rocas típicas de esta región son areniscas sedimentarias que probablemente tengan unos cuantos miles de millones de años, explicó Rice. “Fueron traídas por las inundaciones de este gran canal fluvial, el Neretva Vallis, que es el que trajo el agua, las rocas y los sedimentos”.
El canal fluvial probablemente transportó la roca en forma de rosquilla desde otra zona, añadió. La roca tiene más de 25 centímetros de ancho, pero se desconoce cuánto mide exactamente, dijo Rice.
Otra roca podría haber estado incrustada en el centro de la roca en forma de rosquilla antes de que el tiempo la erosionara dejando una cavidad, añadió. El viento también puede agrandar gradualmente las pequeñas fosas o cavidades que ya existían. O la roca podría haber sido más débil en su centro.
“Desde el punto de vista científico no es nada especial”, dijo Rice.
Pascal Lee, científico planetario del Instituto SETI, cree que podría tratarse de un meteorito, dados los avistamientos de meteoritos en Marte y la proximidad del planeta al cinturón de asteroides, así como su capacidad para conservar meteoritos.
La roca está rodeada de rocas o fragmentos más pequeños, “por lo que tal vez (se trate) de un meteorito que se rompió al aterrizar”, dijo Lee. En este caso, la forma de rosquilla podría haberse creado por la erosión de los materiales más débiles de la roca al entrar en la atmósfera de Marte, añadió.
También es posible que la roca fuera “arrojada desde otra parte de Marte por el impacto de un gran asteroide”, explicó Lee. “Recomendaría que Perseverance se desviara de su curso actual para comprobarlo”.
El equipo del rover no tiene planes de hacerlo, ya que actualmente está conduciendo a Perseverance en la dirección opuesta hacia las rocas que eventualmente muestreará, dijo Rice.
El dónut de Marte no es la única roca con forma de dulce que se ha encontrado en el planeta. En 2014, el rover Opportunity de la NASA descubrió una pequeña roca blanca por fuera y roja por dentro, como un dónut de gelatina, según Lee.
Ingenuity concluye con éxito el quincuagésimocuarto vuelo en Marte 03/08/2023
Durante este vuelo, el pequeño helicóptero voló 0 metros (0 pies) sobre la superficie marciana durante 24,4 segundos a una altitud máxima de 16 pies (5 metros) para reposicionarse. La velocidad alcanzada en esta ocasión fue de 0 metros por segundo.
El Ingenuity Mars Helicopter de la Nasa completó con éxito su vuelo número 54 el pasado jueves, el primero desde que el helicóptero interrumpió su vuelo del 22 de junio. El salto de 25 segundos hacia arriba y hacia abajo proporcionó datos que podrían ayudar al equipo de Ingenuity a determinar por qué su vuelo 53 terminó antes de tiempo.
El vuelo 54 era “solo” una elevación vertical sin ningún desplazamiento horizontal. Las características oficiales (anunciadas en el avance) reportan una altura máxima de 5 metros con una duración de 24,4″ sin movimiento en otros aeródromos (el helicóptero siempre permaneció en Omicron) y sin movimientos horizontales ni de velocidad con respecto al suelo detectados.
Ingenuity concluye con éxito el quincuagésimoquinto vuelo en Marte 12/08/2023
Durante este vuelo, el pequeño helicóptero voló 263,99 metros (866 pies) sobre la superficie marciana durante 142,9 segundos a una altitud máxima de 33 pies (10 metros) para reposicionarse. La velocidad alcanzada en esta ocasión fue de 4,7 metros por segundo.
Ingenuity ahora ha cubierto un total de 12.503 metros de tierra y permaneció en el aire durante casi 98 minutos en sus 55 vuelos, escribieron los miembros del equipo de la misión en el registro de vuelo del helicóptero.
Precisamente el rover actualmente está investigando una enigmática roca sedimentaria que Ingenuity detectó por primera vez durante su vuelo 52 hace varias semanas.
Ingenuity concluye con éxito el quincuagésimosexto vuelo en Marte 26/08/2023
Durante este vuelo, el pequeño helicóptero voló 410 metros (1334 pies) sobre la superficie marciana durante 136 segundos a una altitud máxima de 39.37 pies (12 metros) para reposicionarse.
Ingenuity concluye con éxito el quincuagésimoseptimo vuelo en Marte 02/09/2023
Durante este vuelo, el pequeño helicóptero voló 204 metros (669,3 pies) sobre la superficie marciana durante 120,12 segundos a una altitud máxima de 32,8 pies (10 metros) para reposicionarse. La velocidad alcanzada en esta ocasión fue de 3 metros por segundo.
El helicóptero Ingenuity de la NASA ha logrado otro hito en su misión en Marte al superar los 13 kilómetros de distancia recorrida en vuelo, En su vuelo número 57.
Ingenuity concluye con éxito el quincuagésimo-octavo vuelo en Marte 11/09/2023
Durante este vuelo, el pequeño helicóptero voló 171,38 metros (562,27 pies) sobre la superficie marciana durante 129,8 segundos a una altitud máxima de 32,8 pies (10 metros). La velocidad alcanzada en esta ocasión fue de 2 metros por segundo. Objetivo del vuelo: 1) Reposición del helicóptero 2) Metas científicas por imágenes
Ingenuity concluye con éxito el quincuagésimonoveno vuelo en Marte 16/09/2023
Durante este vuelo, el pequeño helicóptero voló 0 metros (0 pies) sobre la superficie marciana durante 142,94 segundos a una altitud máxima de 65,6 pies (20 metros). Vuelo exclusivamente vertical. Objetivo del vuelo: 1) Reposición del helicóptero 2) Metas científicas por imágenes
El helicóptero Ingenuity de la NASA en Marte ha batido su récord de altitud en vuelo sobre el cráter Jezero del Planeta Rojo, alcanzando 20 metros sobre el suelo, dos más que la marca anterior. Ingenuity pudo despegar, elevarse y aterrizar en el mismo lugar, denominado campo de aterrizaje Sigma.
Ingenuity concluye con éxito el sextuagésimo vuelo en Marte 25/09/2023
Durante este vuelo, el pequeño helicóptero voló 326,493 metros (1071,17 pies) sobre la superficie marciana durante 124,18 segundos a una altitud máxima de 52,49 pies (16 metros). La velocidad alcanzada en esta ocasión fue de 8 metros por segundo. Objetivo del vuelo: 1) Reposición del helicóptero 2) Metas científicas por imágenes. En esta ocasión, la aeronave alzó vuelo a una velocidad de 8 metros por segundo, superando su antigua marca de 6,5 metros por segundo obtenida en el vuelo 49 el pasado 2 de abril.
Ingenuity concluye con éxito el sextuagésimoprimer vuelo en Marte 29/09/2023
Durante este vuelo, el pequeño helicóptero hizo un vuelo vertical, sin desplazamiento horizontal. Con una duración de 129,69 segundos a una altitud máxima de 58,74 pies (24 metros). Objetivo del vuelo: Vuelo emergente
Ingenuity concluye con éxito el sextuagésimosegundo vuelo en Marte 11/10/2023
Durante este vuelo, el pequeño helicóptero voló 268 metros (879,26 pies) sobre la superficie marciana durante 119,30 segundos a una altitud máxima de 59,05 pies (18 metros). La velocidad alcanzada en esta ocasión fue de 10 metros por segundo (nuevo récord). Objetivo del vuelo: 1) Ciencia de la imagen objetivos 2) Ampliación de la envolvente de vuelo Aeródromo.
Ingenuity concluye con éxito el sextuagésimotercer vuelo en Marte 18/10/2023
Vuelo 63 fecha de vuelo: 19/10/2023 Distancia de vuelo horizontal: 573,93 metros (1882,97 pies) Tiempo de vuelo: 137 segundos Altitud de vuelo: 12 metros (39,37 pies). Rumbo: SO Velocidad máxima de vuelo: 6,3 m/s Objetivo del vuelo: 1) Reposición del helicóptero 2) Metas científicas por imágenes
Ingenuity concluye con éxito el sextuagésimocuarto vuelo en Marte 25/10/2023
Durante este vuelo, el pequeño helicóptero voló 408,435 metros (1340 pies) sobre la superficie marciana durante 124,5 segundos a una altitud máxima de 39,37 pies (12 metros). La velocidad alcanzada en esta ocasión fue de 5,3 metros por segundo. Objetivo del vuelo: 1) Ciencia de la imagen objetivos 2) Ampliación de la envolvente de vuelo Aeródromo.
Ingenuity concluye con éxito el sextuagésimoquinto vuelo en Marte 01/11/2023
Durante este vuelo, el pequeño helicóptero voló 7 metros (22,96 pies) sobre la superficie marciana durante 48,26 segundos a una altitud máxima de 32,8 pies (10 metros). La velocidad alcanzada en esta ocasión fue de 1 metros por segundo. Objetivo del vuelo: Reposición del helicóptero Vuelo 65
Ingenuity concluye con éxito el sextuagésimosexto vuelo en Marte 02/11/2023
Durante este vuelo, el pequeño helicóptero voló 0,5 metros (1,6 pies) sobre la superficie marciana durante 23,38 segundos a una altitud máxima de 9,84 pies (3 metros). La velocidad alcanzada en esta ocasión fue de 1 metros por segundo. Objetivo del vuelo: reposicionar el helicóptero.
De hecho, los vuelos 65 y 66 del Ingenuity se llevaron a cabo de manera consecutiva, con distancias registradas de 7 metros y un poco más de medio metro, según se detalla en el diario de vuelo del helicóptero. Estas maniobras fueron necesarias para reposicionar el helicóptero de cara al cierre de las comunicaciones con el Jet Propulsion Laboratory, que se extenderá por aproximadamente dos semanas. Esto se debe a una próxima conjunción solar, que implica que la Tierra y Marte estarán separados por el Sol, imposibilitando el establecimiento de contacto entre ambos planetas. Este fenómeno ocurre aproximadamente cada dos años, y en la ocasión anterior, en septiembre de 2021, las comunicaciones se restablecieron después de que la conjunción solar concluyó.
Ingenuity concluye con éxito el sextuagésimoseptimo vuelo en Marte 02/12/2023
Durante este vuelo, el pequeño helicóptero voló 393 metros (1.289 pies) sobre la superficie marciana durante 135,9segundos a una altitud máxima de 39 pies (12 metros). La velocidad alcanzada en esta ocasión fue de 5,30 metros por segundo. Objetivo del vuelo: reposicionar el helicóptero.
El helicóptero Ingenuity de la NASA en Marte ha superado el hito de volar dos horas en la tenue atmósfera del Planeta Rojo, con ocasión de su vuelo número 67. La aeronave, que contribuye con sus imágenes a planificar la exploración en superficie de Perseverance, totaliza 15.3 kilómetros recorridos en la atmósfera de Marte, que tiene menos del uno por ciento de la densidad de la terrestre.
Ingenuity concluye con éxito el sextuagésimoctavo vuelo en Marte 15/12/2023
Durante este vuelo, el pequeño helicóptero voló 702 metros (2.304 pies) sobre la superficie marciana durante 131,1 segundos a una altitud máxima de 52 pies (16 metros). La velocidad alcanzada en esta ocasión fue de 10 metros por segundo. Objetivo del vuelo: reposicionar el helicóptero.
El vuelo del viernes 15 alcanzó una velocidad máxima de 36 km/h, según el registro de vuelo. Esa marca empató el récord de velocidad de Ingenuity, que se estableció en octubre pasado.
Ingenuity concluye con éxito el sextuagésimnoveno vuelo en Marte 20/12/2023
Durante este vuelo, el pequeño helicóptero voló 705 metros (2.315 pies) sobre la superficie marciana durante 135,4 segundos a una altitud máxima de 52 pies (16 metros). La velocidad alcanzada en esta ocasión fue de 10 metros por segundo. Objetivo del vuelo: reposicionar el helicóptero.
El helicóptero Ingenuity de la NASA en Marte ha batido su anterior marca de distancia recorrida en vuelo, al alcanzar 705 metros entre despegue y aterrizaje en el cráter Jezero. Ingenuity, primera aeronave de vuelo a motor controlado en otro mundo, logró este hito en su vuelo 69, realizado el 20 de diciembre, con origen y destino en el mismo punto.
Ingenuity concluye con éxito el septuagésimo vuelo en Marte 22/12/2023
Durante este vuelo, el pequeño helicóptero voló 260 metros (853 pies) sobre la superficie marciana durante 132,9 segundos a una altitud máxima de 39 pies (12 metros). La velocidad alcanzada en esta ocasión fue de 3 metros por segundo. Objetivo del vuelo: reposicionar el helicóptero.
Ingenuity concluye con éxito el septuagésimoprimer vuelo en Marte 06/01/2024
Durante este vuelo, el pequeño helicóptero voló 71 metros (233 pies) sobre la superficie marciana durante 35 segundos a una altitud máxima de 39 pies (12 metros). La velocidad alcanzada en esta ocasión fue de 7 metros por segundo. Objetivo del vuelo: reposicionar el helicóptero.
Ingenuity concluye con éxito el septuagésimosegundo vuelo en Marte 18/01/2024
El 18 de enero los encargados de la misión decidieron dar otro pequeño salto de medio minuto y 12 metros de altitud sin desplazamiento horizontal para comprobar el estado de los sistemas. Ingenuity se elevó en su 72º vuelo y, tras alcanzar los 12 metros de altitud, permaneció 4,5 segundos estacionario en la misma posición antes de comenzar el descenso a 3,6 km/h. Lamentablemente, en esta fase el sistema de navegación volvió a perder la orientación y, probablemente, ejecutó una maniobra de evasión pensando que estaba desplazándose horizontalmente con respecto al suelo cuando en realidad su velocidad horizontal era nula. Como resultado, una de las palas chocó contra el suelo y resultó dañada. Al mismo tiempo se perdió la comunicación con el rover y, por tanto, con la Tierra. La NASA decidió que Ingenuity no puede seguir volando y el 25 de enero se declaró el fin oficial de la misión del primer helicóptero que ha volado por los cielos de Marte.
A lo largo de su historia, Ingenuity ha efe ctuado 72 vuelos, recorriendo un total de 17 kilómetros. Ha estado en el aire más de dos horas en total, 128,8 minutos, y ha llegado a una altura máxima de 24 metros y una velocidad máxima de 36 km/h.
ctuado 72 vuelos, recorriendo un total de 17 kilómetros. Ha estado en el aire más de dos horas en total, 128,8 minutos, y ha llegado a una altura máxima de 24 metros y una velocidad máxima de 36 km/h.
Ruta de Ingenuity en estos dos años (NASA).

Ingenuity plegado en la Tierra antes del lanzamiento tras ser unido a la barriga de Perseverance (NASA).
Gracias al éxito de Ingenuity la NASA ha decidido incluir dos helicópteros en la próxima sonda del programa MSR (Mars Sample Return) para traer muestras de Marte a la Tierra. Estos helicópteros, los SRH (Sample Recovery Helicopter), llevarán un brazo robot para recoger muestras dejadas por Perseverance y llevarlas hasta la sonda SRL (Sample Retrieval Lander) para luego enviarlas a la órbita marciana y, de allí a la Tierra. Funcionarán como plan B en caso de que Perseverance no esté operativo (por problemas de presupuesto puede que solo vaya un helicóptero). Del mismo modo, China e India están sopesando incluir helicópteros en su próxima misión marciana, que, en el caso de China, sería otra misión de retorno de muestras (Tianwen 3).
Limes Africanus
LImes Africanus
Fronteras del sur
Limes Africano bajo Septimio Severo (La frontera del África romana (bronceado oscuro) en el siglo último 2do AD: Septimi o Severo amplió el limes Tripolitanus drásticamente (medio de bronceado), sosteniendo aunque sea brevemente una presencia militar (color marrón claro) en el Garamantian de capital Garama en 203)
o Severo amplió el limes Tripolitanus drásticamente (medio de bronceado), sosteniendo aunque sea brevemente una presencia militar (color marrón claro) en el Garamantian de capital Garama en 203)
En la mayor extensión del Imperio Romano, la frontera sur se encontraba a lo largo de los desiertos de Arabia en el Medio Oriente (ver Romanos en Arabia) y el Sahara en el norte de África, lo que representaba una barrera natural contra la expansión. El Imperio controlaba las costas del Mediterráneo y las cadenas montañosas del interior. Los romanos intentaron dos veces ocupar el Oasis de Siwa y finalmente usaron Siwa como lugar de destierro. Sin embargo, los romanos controlaron el Nilo muchas millas en África hasta la frontera moderna entre Egipto y Sudán.[cita requerida]
En África, los romanos controlaban el área al norte del Sahara, desde el Océano Atlántico hasta Egipto, con muchas secciones de limas (Limes Tripolitanus, Limes Numidiae, etc.).[12]
El Fossatum Africae (“foso africano”) de al menos 750 km controlaba las fronteras del sur del Imperio y tenía muchas similitudes de construcción con el Muro de Adriano.
Hay fossatas similares, pero más cortas, en otras partes del norte de África. Entre los rangos de Matmata y Tabaga en el Túnez moderno hay un fossatum que se duplicó durante la Segunda Guerra Mundial.[13] También parece haber un recorrido de 20 km., de fossatum en Bou Regreg en Marruecos, aunque esto no habría estado dentro del alcance de la proclamación del Codex Theodosianus porque en ese momento la provincia no estaba en África, administrativamente hablando.[14]
En el sur de Mauritania Tingitana, la frontera en el siglo III se encontraba justo al norte de Casablanca, cerca de Sala, y se extendía hasta Volubilis.
Septimius Severus expandió el “Limes Tripolitanus” dramáticamente, incluso manteniendo brevemente una presencia militar en la capital de Garama, Garama, en 203 d. C. Gran parte del éxito de la campaña inicial lo logró Quintus Anicius Faustus, el legado de la Legio III Augusta.
El Limes Tripolitanus era una zona fronteriza de defensa del Imperio Romano, construido en el sur de lo que ahora es Túnez y el noroeste de Libia. Fue pensado principalmente como una protección para las ciudades tripolitanas de Leptis Magna, Sabratha y Oea en la Libia romana.
Después de sus conquistas africanas, el Imperio Romano pudo haber alcanzado su mayor extensión durante el reinado de Septimio Severo,[15] [16] bajo quien el imperio abarcaba un área de 2 millones de millas cuadradas[15] (5,18 millones de kilómetros cuadrados).
Limes Germánico inferior o Renano
Limes Germánico inferior o Renano
Las limas renales eran el sistema de fortificaciones a lo largo de un río (ripa) para defender los territorios de la Galia (frente a Magna Germania, poblada por las poblaciones germánicas), que podían dividirse en dos o tres tramos diferentes y conectar la desembocadura del río Rin con la del Danubio.
El limes germánico, se divide generalmente en tres, siendo el Renano, el más próximo al Mar del Norte.
El limes de Germania Inferior constituía la frontera nororiental del Imperio Romano. Se extendía a lo largo de 400 km. del río Rin desde las estribaciones del Macizo renano, al sur de Bonn, hasta la costa del Mar del Norte, en los Países Bajos. Esta estructura militar se estableció en las últimas décadas de la primera centuria antes de nuestra era. Estuvo en uso hasta la desintegración del Imperio Romano a principios del siglo V d.C. En sus inicios se utilizó como plataforma logística desde la cual los romanos lanzaron su estrategia de conquista  de Germania, las tierras localizadas más allá del Rin. Tras el fracaso de esta invasión con la aniquilación de tres legiones en Teutoburgo, la margen izquierda del Rin se convirtió en la frontera del Imperio. Una línea fortificada marcada por el curso del Rin.
de Germania, las tierras localizadas más allá del Rin. Tras el fracaso de esta invasión con la aniquilación de tres legiones en Teutoburgo, la margen izquierda del Rin se convirtió en la frontera del Imperio. Una línea fortificada marcada por el curso del Rin.
En 2018 se presentó una candidatura conjunta entre Alemania y los Países Bajos para que el Limes de Germania Inferior sea declarado Patrimonio Mundial de la UNESCO, dentro de la categoría Fronteras del Imperio Romano. (Ver artículo del Limes en los Países Bajos). Este objetivo culminó en Julio de 2021 con la designación del Limes de Germania Inferior como Patrimonio Mundial de la UNESCO.
El recorrido de el Limes, a lo largo del río Rín.
El limes de Germania Inferior en Alemania se extiende por los actuales estados de Renania-Palatinado y Renania del Norte-Wesfalia. Su punto de partida se hallaba en Kleve (Renania del Norte-Wesfalia), en la región de Düsseldorf, y finalizaba en Remagen (Renania Palatinado). Este lugar marcaba el inicio de la provincia de Germania Superior, punto en el que el Limes se desplazaba a la margen derecha del Rin.
Iba desde la desembocadura hasta las montañas Taunus (Rheinbrohl). En el siglo I tenía asentadas cuatro legiones (I Germanica en Bonna actual Bonn, la V Alaudae y la XV primigenia en Castra Vétera actual Xanten, y la XX Valeria Victrix, y XXI Rapax), en el siglo II se redujeron a tres (la IX hispana en Noviomagus, la XXX Ulpia Victrix en Vétera y la I Minervia en Bonna).
La estructura militar del Limes de Germania Inferior estaba formada por fortalezas legionarias, fuertes auxiliares, fortines, torres de observación, y campos temporales de marcha. En las fortalezas se encontraban acantonadas las unida des militares más potentes del ejército romano, las legiones. Los fuertes auxiliares estaban destinados a los cuerpos auxiliares de infantería y caballería.
des militares más potentes del ejército romano, las legiones. Los fuertes auxiliares estaban destinados a los cuerpos auxiliares de infantería y caballería.
Hacia el año 80 dC, el limes, una línea fortificada con murallas, fosos, terraplenes y empalizadas defendida por cuatro legiones protegía la frontera septentrional del imperio romano. Los campamentos de las legiones estaban ubicados en Bonn y Neuss y los de los cuerpos auxiliares en Xanten.
El limes y las legiones que la defendían se convirtieron en una barrera infranqueable para los pueblos germánicos que se trasladaban hacia las tierras más fértiles del sur.
El emperador Tito reformó el limes después de renunciar a la ocupación del territorio germánico hasta el río Elba. En el año 83 dC el emperador Domiciano inició una campaña entre los ríos Main y Lahn contra los catos para alejar a los germanos del Rin.
Tras la victoria de Domiciano la frontera avanzó hasta situarse en el curso del Rin, asentándose las bases del limes germánico, que quedará establecido a lo largo del Rin hasta la caída del imperio romano.
A partir de ese momento, el número de legiones romanas acantonadas en Germania Inferior iría disminuyendo. Con Domiciano se suprimió el campamento de Neuss, asentándose las legiones en Bonn, Xanten y Nimega. Posteriormente, en época de Trajano, ya únicamente quedarían los campamentos legionarios de Bonn y Xanten.
Fortalezas legionarias
En el Limes de Germania Inferior en Alemania se encontraban cuatro fortalezas legionarias: Xanten (Castra Vetera), Neuss (Novaesium), Colonia (Colonia Clauda Ara Agrippinensium) y Bonn (Castra Bonona). En Colonia además se hallaba la base naval de la Classis Germanica, la flota romana del Rin. Son destacables los vestigios de la primera integrados en el Parque Arqueológico de Xanten. Entre los interesantes monumentos romanos de Colonia merecen especial mención las ruinas del pretorio del gobernador, integrado en un museo subterráneo.
La parte histórica de la frontera de defensa romana en Germania inferior tenía una longitud de 385 kilómetros. Ese sector del Limes era también conocido como “Limes Húmedo”. Desde el 19 a.C. hasta el 430 d.C., empalizadas, trincheras, muros, torres de vigilancia y hasta 30.000 legionarios aseguraron el movimiento de mercancías y personas a lo largo de la orilla izquierda del río Rin, y aún más allá de las fronteras del Imperio. La parte germánica inferior del Limes se extendía desde la actual ciudad de Bad Breisig, en Renania-Palatinado, pasando por Neuss, en Renania del Norte-Westfalia, hasta Katwijk, en los Países Bajos, cerca de la desembocadura del Rin.
Fuertes auxiliares
Entre los fuertes auxiliares, siete están catalogados para formar parte del Patrimonio de la Humanidad: Kalkar (Burginatium, fuerte de caballería que se encuentra entre los mejor preservados), Alpen, Moers (Asciburgium), Krefeld (Gelduba), Monheim, Dormagen (Durnomagus) y Remagen (Rigomagus). Salvo los fuertes de Gelduba y Rigomagus, la mayor parte de los fuertes conservan sus estructuras bajo tierra, en buen estado, según las prospecciones arqueológicas.
Campamentos temporales
Se han descubierto, en un buen estado de conservación, numerosos campamentos temporales. Dieciséis en Ueden, cuatro en Wesel, Alpen, doce en Alfter/Bornheim y diez en Bonn.
Otras construcciones
La construcción de esta vasta red de construcciones militares necesitaba de fábricas, canteras donde producir/obtener los materiales necesarios para levantar las edificaciones. Así, en Bad Münstereifel se han hallado seis hornos de cal integrados en un edificio de trabajo. En Königswinter se descubrieron las canteras de Drachenfels, cuya piedra fue utilizada para construcciones e inscripciones a lo largo del Limes germano.
Remagen. Vestigios del fuerte de Rigomagus (foto: Marcin-Janek)

Canteras romanas de Drachenfels (foto: Klaus Venus)

Colonia Claudia Ara Agrippinensium se llamaba la sede del gobernador de la región de Germania inferior. El pretorio (en la foto) era su residencia.






Chang’e 5
Chang’e 5
Lanzamiento de Chang’e 5 desde el Centro de Lanzamiento de Satélites de Wenchang
Tipo de misión: Retorno de muestras lunares
Operador: Administración Espacial Nacional China
- SATCAT: 47097
ID NSSDCA: 2020-087A
Propiedades de la nave
Fabricante: Academia China de Tecnología Espacial
Masa de lanzamiento: 3.780 kg1
Comienzo de la misión
Lanzamiento: 23 de noviembre de 202023
Vehículo: Larga Marcha 5
Lugar: Centro de Lanzamiento de Satélites de Wenchang
Fin de la misión
Deshecho: reingreso
Fecha de decaída: 16 de diciembre de 2020
Parámetros orbitales
Sistema de referencia: Lunar
Chang’e 5 (Chino: 嫦娥五号; pinyin: Cháng’é wǔhào) es una misión china de exploración lunar robótica que consta de un aterrizador y un vehículo de retorno de muestras. Su lanzamiento se realizó el 23 de noviembre de 2020 por un Larga Marcha 5, y entró en órbita lunar el 28 de noviembre y alunizó el 1 de diciembre del mismo año.245678 Chang’e 5 fue la primera misión china de retorno de muestras, retornando con al menos 2 kilogramos de muestras de suelo y rocas lunares a la Tierra el 16 de diciembre de 2020.9 Como sus naves predecesoras, ésta nave espacial lleva el nombre de la diosa china de la luna, Chang’e.
Es la primera misión de retorno de muestras lunares desde Luna 24 en 1976, convirtiendo a China en el tercer país en retornar muestras de la Luna, tras los Estados Unidos y la Unión Soviética.
Visión general
El Programa de Exploración Lunar chino está diseñado para ser ejecutado en tres fases de adelanto tecnológico incremental. La primera fase consistía simplemente en lograr alcanzar la órbita lunar, una tarea completada por Chang’e 1 en 2007 y Chang’e 2 en 2010. La segunda fase consiste en aterrizar en la Luna y explorarla, tareas completadas por Chang’e 3 en 2013 y Chang’e 4 en 2019. La tercera fase consiste en recoger muestras lunares de la cara visible y retornarlas a la Tierra, tareas para Chang’e 5 y Chang’e 6. El programa pretende facilitar el aterrizaje lunar tripulado en la década de 2030 y la posible construcción de una base en el polo sur de la Luna.10
Perfil de la misión
Anteriormente estaba planeado que la misión fuese lanzada mediante un cohete Larga Marcha 5 desde el Centro de Lanzamiento de Satélites de Wenchang en la Isla Hainan, pero un fallo de este lanzador en 2017 creó incertidumbre sobre su capacidad para transportar a Chang’e 5.6 Actualmente sigue planeado que la nave sea lanzada mediante un cohete Larga Marcha 5, y la zona de aterrizaje prevista es Mons Rümker en Oceanus Procellarum, situada en la región noroeste de la cara visible de la Luna.1112 La ubicación es un gran montículo volcánico elevado de 70 km de diámetro con una fuerte firma espectroscópica de material basáltico de mar lunar.1314
Las partes de las que se compone Chang’e 5 y sus diferentes fases.
La misión constaría de cuatro módulos o elementos: el aterrizador que recogería aproximadamente 2 kg de muestras a 2 metros bajo la superficie12 y las colocaría en un vehículo de ascenso que será insertado en órbita lunar. El vehículo de ascenso realizaría un encuentro y acoplamiento automático con un orbitador que transferiría las muestras a una cápsula para su regreso a la Tierra.1115
La masa estimada en el lanzamiento es de 3.780 kg, el aterrizador serían 1.200 kg y el vehículo de ascenso unos 120 kg.1116
Chang’e 5-T1
Chang’e 5-T1 fue una misión lunar robótica experimental lanzada el 23 de octubre de 2014 para realizar pruebas de reentrada atmosférica del diseño de la cápsula previsto para ser utilizado en la misón Chang’e 5.1718 Su módulo de servicio, llamado DFH-3A, permaneció en órbita alrededor de la Tierra antes de ser reubicado en órbita lunar el 13 de enero de 2015 a través del punto L2 Tierra-Luna. En la órbita lunar utiliza sus restantes 800 kg de combustible para probar maniobras claves para misiones lunares futuras.19
Cargas útiles del aterrizador
El aterrizador llevará cámaras de aterrizaje, una cámara panorámica, un espectrómetro para determinar la composición mineral, un instrumento para analizar los gases del suelo lunar, un detector térmico de muestreo seccional, y un georradar.1115 Para adquirir muestras, estará equipado con un brazo robótico, un martillo rotativo-percutor, una pala para muestreo, y tubos de separación para aislar muestras individuales.
Para saber más: https://danielmarin.naukas.com/2017/01/03/primeras-imagenes-de-la-sonda-china-change-5-para-traer-muestras-de-la-luna/

El cohete Long March-5 durante su lanzamiento REUTERS/Tingshu Wang

La nave china Chang’e 5 llega a la Luna

Actualizado Martes, 1 diciembre 2020 – 19:03
El gigante asiático ha anunciado que su nave robótica ha logrado alunizar en la zona prevista, Mons Rümker. Su misión será recoger dos kilos de rocas y traerlas a la Tierra a mediados de diciembre.
La nave espacial china Chang’e 5 acaba de alunizar. Así lo han asegurado las autoridades chinas, que han ofrecido este martes las primeras imágenes de este nuevo hito histórico para su programa espacial, pues se trata de la misión más compleja que emprende el gigante asiático.
La nave robótica despegó el pasado lunes 23 de noviembre (24 de noviembre en China) desde el Centro Espacial de Wenchang, en la isla de Hainan, a bordo de un cohete Long March rumbo a nuestro satélite con el objetivo de recoger muestras de su suelo (regolito lunar) y traerlas a la Tierra a mediados de diciembre.
Su zona de trabajo es Mons Rümker, un montículo volcánico situado en una llanura de lava llamada Oceanus Procellarum en la cara visible de la Luna. El plan es que recoja unos dos kilos de rocas y otros escombros, para lo c ual taladrará la superficie con su brazo robótico, que trasladará las muestras a un vehículo que ascenderá hasta acoplarse con un módulo orbitador que permitirá que el material sea enviado a la Tierra. Si todo marcha según lo previsto, la cápsula con el material lunar aterrizará en la provincia de Mongolia Interior dentro de dos semanas.
ual taladrará la superficie con su brazo robótico, que trasladará las muestras a un vehículo que ascenderá hasta acoplarse con un módulo orbitador que permitirá que el material sea enviado a la Tierra. Si todo marcha según lo previsto, la cápsula con el material lunar aterrizará en la provincia de Mongolia Interior dentro de dos semanas.
La sombra de la nave durante el alunizaje CLEP.
Desde hace más de 40 años ningún país ha traído muestras de nuestro satélite. El último que lo logró fue la URSS en 1976 con una de sus misiones robóticas Luna, que consiguió transportar unos 170 gramos de material. Los estadounidenses siguen siendo los únicos que han conseguido enviar misiones tripuladas a nuestro satélite.
El coronavirus no está afectando de manera importante al programa espacial de China, que en julio lanzó una nave robótica a Marte, la primera que manda al planeta rojo.
La Luna es sin embargo el primer foco de atención del gigante asiático, que en 2013 realizó su primer alunizaje. En enero de 2019 se convirtió en la primera nación que logra un aterrizaje controlado en la cara oculta de nuestro satélite. Lo consiguió con la sonda Chang’e 4, que llevaba a bordo un robot explorador llamado Yutu-2.
Chang’e-5: la misión china regresa a la Tierra con las primeras rocas de la Luna en más de 40 años. La misión china Chang’e-5 regresó a la Tie rra con muestras de rocas y “suelo” de la Luna.
rra con muestras de rocas y “suelo” de la Luna.
Fuente de la imagen, Getty Images
La cápsula de retorno de la sonda Chang’e-5 de China ha aterrizado en la Tierra este 16 de diciembre a las 17:59 UTC, trayendo de regreso muestras del país asiático recolectadas de la Luna, las primeras del mundo en más de 40 años.
A la 1:59 del 17 de diciembre, hora de Pekín, el retornador del proyecto de exploración lunar Chang’e-5 ha aterrizado en el área planificada de Siziwang Banner, Mongolia Interior, marcando la finalización con éxito de la primera misión de muestreo y retorno de cuerpos celestes extraterrestres de China, ha infor mado la Programa de Exploración Lunar China (CLEP) en su cuenta de Weibo.
mado la Programa de Exploración Lunar China (CLEP) en su cuenta de Weibo.
Han pasado más de 40 años desde que misiones de Estados Unidos y la entonces Unión Soviética recolectaran rocas y suelo lunar para ser analizados en nuestro planeta.
Las muestras permitirán investigar la geología y la historia temprana del satélite natural terrestre.
La sonda, que comprendía al lanzamiento un orbitador, un módulo de aterrizaje, un ascendente y un retorno, fue lanzada el 24 de noviembre y su combinación de módulo de aterrizaje y ascendente alunizó en el norte del Mons Rumker en Oceanus Procellarum, también conocido como el Océano de las Tormentas, en el lado cercano de la Luna, el 1 de diciembre.
Allí recogió muestras lunares en los días siguientes tras lo cual emprendió su viaje de regreso desde la órbita lunar. El plan era recoger 2 kg de muestras, aunque todavía no se ha revelado cuánto se recogió finalmente. Son las primeras desde las traídas en los años 70 del siglo XX por soviéticos y estadounidenses.
Arroz, orquídeas, alfalfa y avena
Además de estas muestras, los científicos chinos esperan otro paquete del viaje espacial: una variedad de semillas de plantas que pueden traer mayores cosechas. Según la Space Breeding Innovation Alliance, citada por Xinhua, su programa de reproducción espacial era parte de la carga útil.
Las semillas, que incluyen arroz, orquídeas, alfalfa y avena, se embarcaron en el viaje de ida y vuelta a la Luna el 24 de noviembre cuando se lanzó la sonda. El cultivo espacial en China comenzó en la década de 1980. Después de estar expuestas a la radiación cósmica y la gravedad cero, algunas semillas pueden mutar y producir mayores rendimientos y una mejor calidad cuando se vuelven a plantar en la Tierra, dicen los científicos.
Con el desarrollo del programa espacial de China, los investigadores del Instituto de Ciencias Farmacéuticas y Ganaderas de Lanzhou han estado buscando semillas de forraje de calidad con nuevas tecnologías espaciales, con la esperanza de reducir la dependencia de China de las importaciones.
Desde 2009, el instituto ha enviado 38 lotes de semillas de nueve tipos de forrajes al espacio en siete viajes, incluidas tres naves espaciales de la serie Shenzhou, el laboratorio espacial Tiangong-1, el satélite recuperable Shijian-10 y la nave espacial tripulada de nueva generación y Chang’e-5. El instituto ha cultivado Alfalfa Zhongtian No. 1, que se cultiva ampliamente en el norte de China.
Los investigadores dicen que no es posible predecir si las semillas enviadas al espacio eventualmente mutarán o cómo lo harán. La respuesta solo se revela cuando regresan a la Tierra para plantarlas y seguir con su cultivo.
El lander Chang’e 5 chino, tras recoger con éxito muestras de la Luna, ha acabado congelado en la superficie lunar
15 Diciembre 2020Actualizado 16 Diciembre 2020, 21:41
La misión Chang’e 5 de China es una de las más excitantes en estos últimos años. Con el propósito de recoger muestras lunares por primera vez en cinco décadas, el país asiático envió a Chang’e 5 hasta nuestro satélite y ahora lo está trayendo de vuelta con dos kilogramos de muestras. Más o menos, porque parte de la nave, tras acabar su misión, se ha quedado en la Luna. Y ahora que se ha hecho de noche ahí, no lo está pasando nada bien.
Chang’e 5 se compone de varias piezas y partes que han sido cruciales en cada fase de la misión. El propulsor para llegar a la luna, el módulo de aterrizaje, la cápsula con las muestra, el orbitador… De entre estas partes destaca el lander, que fue el encargado de descender hasta la superficie lunar, recoger las muestras y ayudar a la cápsula a volver al orbitador. Para esto último se sacrificó quedándose en la Luna.
Cuando explicamos el lanzamiento de la misión avisamos de la importancia de completar la misión en menos de catorce días. Había una razón de ser para esto, y es que 14 días es lo que dura un “día lunar”. China, con el objetivo en mente de optimizar lo máximo posible la misión, no equipó a la nave con protectores térmicos. Esto ahorra de forma considerable en peso y volumen, pero también arriesga y limita la misión a que se complete durante el día lunar. De lo contrario ocurre lo que ha ocurrido: congelación de todos los circuitos y piezas de la nave.
Las frías noches lunares a -190 °C
Ahora que se ha hecho de noche en la Luna donde aterrizó el lander, este ha acabado congelado a unas temperaturas que suelen descender hasta los -190 °C. Al no contar con protectores térmicos como sí lo hacen los landers Chang’e 3 y Chang’e 4, el Chang’e 5 ha dejado de responder y sus sistemas internos se han estropeado.
Esta pérdida del lander no es un fracaso para la misión, de hecho es justamente lo planeado. El lander ya hizo su trabajo aterrizando espectacularmente bien en la superficie lunar, recogiendo datos de ahí y ayudando a la cápsula a volver al orbitador. El orbitador ahora se encuentra de vuelta hacia la Tierra.
Imágenes enviadas por el lander en el momento de lanzar de vuelta la cápsula hacia el orbitador.
Además de recoger alrededor de 2 kilogramos de muestras, el módulo de aterrizaje llevó a cabo diferentes experimentos con un radar que ha ofrecido información sobre las capas debajo del sitio de aterrizaje. Un espectrómetro de imágenes analizó la composición del regolito superficial y además con una cámara panorámica se tomaron detalladas fotografías de Oceanus Procellarum, el área de la Luna donde aterrizó.
Mientras el lander sucumbe a las frías temperaturas de la noche lunar, el resto de la nave está de camino a la Tierra con las muestras recogidas. Se espera que la cápsula con las muestras se desprenda de la nave y caiga en algún lugar de Inner Mongolia este próximo 17 de diciembre. De hacerlo con éxito y si los investigadores chinos recogen a salvo las muestras, será la primera vez en casi 50 años que lo hace de nuevo la humanidad. Previamente sólo Estados Unidos y la antigua Unión Soviética han conseguido traer muestras lunares a la Tierra. Otros como Japón las han traído recientemente de asteroides.
Sonda china Chang’e-5 regresó a la Tierra con material lunar

{kind=link}
El último intento lo había llevado a cabo con éxito la antigua Unión Soviética en 1976, con la misión robótica Luna 24.
Una sonda china descendió en la Tierra este jueves (17.12.2020) trayendo rocas y arena de la Luna, y completó una misión que no se había realizado en cuatro décadas, informó la agencia de noticias estatal Xinhua.
El módulo de la nave espacial Chang’e-5 aterrizó en la región de Mongolia Interior, en el norte de China, informó la agencia espacial de ese país, citada por Xinhua.
China busca alcanzar a Estados Unidos y Rusia después de tomar décadas para igualar los logros de sus rivales e invertir miles de millones en su programa espacial militar.
La sonda china Chang’e 5, bautizado con el nombre de una diosa de la Luna según la mitología china, se posó sobre el satelite terrestre el 1 de diciembre y dos día después comenzó su viaje de regreso a la Tierra.
Los científicos esperan que las muestras recolectadas les permitan conocer más sobre los oríg
las muestras recolectadas les permitan conocer más sobre los oríg enes de la Luna, su formación y la actividad volcánica en su superficie.
enes de la Luna, su formación y la actividad volcánica en su superficie.
La cápsula de retorno de la sonda china Chang’e-5 aterriza en Siziwang Banner, en la Región Autónoma de Mongolia Interior, norte de China, el 17 de diciembre de 2020.
Con esta misión, China será el tercer país en haber extraído muestras del satélite, después de Estados Unidos y la antigua Unión Soviética en las décadas de 1960 y 1970.
La misión incluyó extraer 2 kilos de rocas tras perforar el suelo hasta dos metros de profundidad, en el “Océano de las Tormentas”, una vasta llanura de lava.
Esta misión es una nueva etapa del programa espacial chino, que a principios de 2019 consiguió por primera vez en la historia el alunizaje de un aparato en la cara oculta de la Luna.
China espera disponer de una estación espacial de aquí a 2022, y, finalmente, enviar astronautas a la Luna.
Debe estar conectado para enviar un comentario.