Tecnología
OSO 3
OSO 3
OSO 3 ( Observatorio Solar en Órbita 3 ), u Tercer Observatorio Solar en Órbita [2] [3] (conocido como OSO E2 antes del lanzamiento) fue lanzado el 8 de marzo de 1967, en una órbita casi circular de altitud media de 550 km, inclinada a 33 ° al plano ecuatorial. Su grabadora de cinta a bordo falló el 28 de junio de 1968, lo que permitió solo la adquisición de datos escasos en tiempo real durante los pases de la estación a partir de entonces; los últimos datos se recibieron el 10 de noviembre de 1969. OSO 3 volvió a entrar en la atmósfera terrestre y se quemó el 4 de abril de 1982.
OSO 3
El tercer Observatorio Solar en Órbita, OSO 3, mostrando su “Vela” (superior), que lleva experimentos solares apuntando al Sol, y su “Rueda” giratoria (inferior), que lleva dos instrumentos de exploración del cielo: el UCSD de rayos X duros experimento, y el telescopio de rayos gamma del MIT
Tipo de misión: Física solar
Operador: NASA
ID COSPAR: 1967-020A
SATCAT no.: 02703
Duración de la misión: 2 años, 8 meses
Propiedades de la nave espacial
Fabricante: BBRC
Masa de lanzamiento: 281 kilogramos (619 libras)
Comienzo de la misión
Fecha de lanzamiento: 8 de marzo de 1967, 16:19:00 UTC
Cohete: Delta C
Sitio de lanzamiento: Cabo Cañaveral LC-17A
Fin de misión
Último contacto: 10 de noviembre de 1969
Fecha de descomposición: 4 de abril de 1982
Parámetros orbitales
Sistema de referencia: Geocéntrico
Régimen: tierra baja
Excentricidad: 0.002164
Altitud del perigeo: 534 kilometers (332 mi)
Altitud de apogeo: 564 kilometers (350 mi)
Inclinación: 32,87 grados
Período: 95.53 minutos
Movimiento medio: 15.07
Época: 8 de mayo de 1967, 11:19:00 UTC [1]
Como todos los satélites de la serie American Orbiting Solar Observatory (OSO), tenía dos segmentos principales: uno, la “Vela”, estaba estabilizado para mirar hacia el Sol y llevaba paneles solares y experimentos de física solar que apuntaban al Sol. La otra sección, la “Rueda”, giraba para proporcionar una estabilidad giroscópica general y también llevaba instrumentos de exploración del cielo que barrían el cielo a medida que giraba la rueda, aproximadamente cada 2 segundos.
Instrumentación
| Experimentos a bordo de OSO 3 | ||
| Nombre | Objetivo | Investigador principal |
| Rayos gamma de alta energía (> 50 MeV) | anti-solar | Kraushaar, WL , Instituto de Tecnología de Massachusetts |
| Detector de espectro de rayos cósmicos y analizador de rayos gamma | Sol , todo el cielo | Kaplon, Morton F, Universidad de Rochester |
| Experimento de radiómetro direccional | Tierra | Neel, Carr B Jr, Centro de Investigación Ames de la NASA |
| Tierra Albedo (0,32 a 0,78 µm) | Tierra | Neel, Carr B Jr, Centro de Investigación Ames de la NASA |
| Espectrómetro EUV solar de 0,1 a 40,0 nm | Sol | Neupert, Werner M, Centro de Vuelo Espacial Goddard de la NASA |
| Cámara de iones de rayos X solares de 0,8 a 1,2 nm | Sol | Teske, Richard G, Universidad de Michigan |
| Telescopio de rayos gamma solar y celeste (7,7 a 200 keV) | Sol, todo el cielo | Laurence E. Peterson Universidad de California, San Diego |
| Emisividad de radiación térmica | entorno espacial cercano a la Tierra | Neel, Carr B Jr, Centro de Investigación Ames de la NASA |
| Espectrómetro ultravioleta extremo | Sol | Hinteregger, Hans E, Laboratorio Phillips |
El Sail llevó a cabo un experimento de rayos X duros de UCSD, con un solo cristal de centelleo delgado NaI (Tl) más un fototubo encerrado en un escudo anticoincidencia CsI (Tl) en forma de obús. La resolución energética fue del 45% a 30 keV. El instrumento operaba de 7,7 a 210 keV con 6 canales. El Investigador Principal (PI) fue el Prof. Laurence E. Peterson de UCSD. de rayos gamma cósmicos (>50 MeV También en la rueda había un instrumento de estudio del cielo ) aportado por el MIT, con el IP Prof. William L. Kraushaar.
Resultados científicos
OSO-3 obtuvo extensas observaciones de rayos X duros de erupciones solares, el fondo cósmico difuso de rayos X y múltiples observaciones de Scorpius X-1, la primera observación de una fuente de rayos X extrasolar por un satélite de observación.[4] [5] [6] [7]
El instrumento de rayos gamma del MIT obtuvo la primera identificación de rayos gamma cósmicos de alta energía que emanan de fuentes galácticas y extragalácticas.[8]
Lorenz Fries
Lorenz Fries
Retrato de Lorenz Fries en una obra de 1523.
Lorenz Fries, latinizado Laurentius Phrisius (n. ca. 1490; m. 1531/32 en Metz12) fue un médico, astrólogo y geógrafo del Sacro Imperio Romano Germánico. Su obra más conocida fue el Spiegl der Artzny (“Espejo de la Medicina”), con ocho ediciones publicadas entre 1518 y 1557. También tuvo un papel relevante en la vulgarización y popularización de la obra geográfica de Martin Waldseemüller.
Carrera médica inicial
Portada de la edición de 1532 del Spiegel der Artzney.
Lorenz Fries nació hacia 1490, probablemente en Metz o quizás en Mühlhausen. Su apellido ha sido escrito de múltiples maneras: Fries, Friess, Frisius, Phrisius, Phryes, Phrijsen; él mismo se llamó “Laurentius Phryesen” en la portada de su libro más famoso.3 No se tienen datos ciertos sobre su educación, aunque se cree que pudo estudiar medicina en las universidades de Viena, Piacenza, Padua o Montpellier.4
Hacia 1516 se asentó en la ciudad alsaciana de Colmar, atendiendo a enfermos en el monasterio de San Agustín. Ese mismo año publicó su primer libro, una breve obra en latín sobre la sífilis, del cual no se conserva ninguna copia. En 1518 publicó un nuevo libro sobre la sífilis, en el que explicó el novedoso tratamiento mediante esencia de guayaco, un árbol caribeño traído por los españoles a Europa diez años antes.4 En el mes de septiembre de 1518 salió de la imprenta de Johann Grüninger en Estrasburgo la que sería la obra médica más conocida de Fries, el Spiegl der Artzny (“Espejo de la Medicina”), un libro de remedios caseros inspirado de Hipócrates, Galeno y Avicena y escrito en alemán que tuvo siete ediciones más hasta 1546.5
En 1519, Fries se mudó a Estrasburgo, tras un breve paso por Friburgo. En la imprenta de Grüninger publicó un tratado sobre manantiales. Poco después adquirió la ciudadanía al casarse con una mujer local, Barbara Thun. También se apuntó al gremio Zur Steltz.6
Actividad cartográfica
En Estrasburgo, Fries empezó a colaborar en obras de geografía y cosmografía. Sus iniciales, LF, aparecen en un mapamundi incluido en una edición del Polyhistor de Solino, publicada en 1520. El mapa es una reducción del gran planisferio mural de 1507 de Martin Waldseemüller, y durante mucho tiempo se consideró el mapa más antiguo con el topónimo “América”.7 No está claro cuál fue el papel de Fries en la elaboración de este mapa, ya que su título lo atribuye a Petrus Apianus. La intervención de Fries parece confirmada sin embargo por una pequeña línea de texto que, cerca de la isla Española, dice que allí hay guayaco, el remedio contra la sífilis publicitado por Fries.8
El impresor Grüninger le confió a Fries la preparación del texto y algunos mapas de una edición de la Geografía de Ptolomeo. Para los mapas y sus textos, Fries se inspiró en gran medida en obras de Waldseemüller. En el mapa de Tierra Santa, sin embargo, Fries cambió radicalmente la descripción: en vez del “iste terra est fertil” (“esta tierra es fértil”) de Waldseemüller, afirmó que Palestina era “estéril y sin cultivar”. El texto de Fries fue reproducido en 1535 en otra edición de la Geografía, a cargo del médico aragonés Miguel Servet. Se ha afirmado que uno de los argumentos con los que Calvino logró condenar a muerte a Servet fue esta afirmación sobre la esterilidad de la Tierra Santa, si bien algunos historiadores lo consideran un bulo.9 La Geografía de Fries fue publicada en 1522 por Johann Koberger. Se conservan muy pocos ejemplares y ello sugiere que se vendió mal, quizás debido a los numerosos errores de imprenta.7
El siguiente gran proyecto geográfico del dúo Grüninger – Fries fue una edición reducida del planisferio mural de Waldseemüller titulado Carta Marina, de 1516. Fries se encargó de traducir la mayoría del texto del mapa al alemán y, sobre todo, escribió un libro titulado Uslegung der Mercarthen que se vendía junto con el mapa y explicaba cómo usarlo. Además el Uslegung incluía descripciones de ciudades y países de todo el mundo.10 El libro fue publicado en 1525, pocos meses antes de que Fries abandonase Estrasburgo para siempre. Se supone que el mapa también salió al mercado ese año, aunque los dos ejemplares completos que se conservan son reediciones posteriores, de 1530 y 1531.7 La Carta Marina de Fries era de menor calidad cartográfica y artística que la de Waldseemüller pero su menor tamaño y el hecho de estar escrita en el lenguaje del pueblo llano la hicieron mucho más popular que la original.11
Astrología y persecución
Fries, como muchos médicos del Renacimiento, consideraba a la astrología una herramienta imprescindible de la medicina. Por ello, Fries publicó un tratado sobre cómo usar el astrolabio para calcular los días críticos de una enfermedad (1522), horóscopos para cada nuevo año (al menos entre 1524 y 1530) así como un libro titulado “Breve defensa de la Astrología” (1520), en respuesta a la condena de la astrología realizada poco antes por Martín Lutero.12 Esta última obra convirtió a Fries en blanco de las sátiras de autores protestantes. Tanto Fries como su editor, Grüninger, se encontraron cada vez más perseguidos en Estrasburgo, ya que el gobierno de la ciudad se había apuntado firmemente a las tesis de Lutero. La presión condujo a Fries a renunciar a su ciudadanía el 11 de mayo de 1525 y mudarse a Metz y luego a Colmar. En esa ciudad acogió unos años más tarde a otro médico católico, Paracelso, que huía de los protestantes de Basilea.10
Últimos años
Tras abandonar Estrasburgo, Fries ya no volvió a trabajar en obras geográficas. Sí publicó un par de libros más sobre medicina, uno de ellos sobre la enfermedad denominada sudor inglés (Sudoris anglici exitialis, 1529).13 También tuvo una fuerte controversia con Paracelso.13
Se desconoce la fecha exacta de fallecimiento de Fries pero debió ser hacia 1531.13
Mapas de Lorenz Fries
Tabula Terra Nova de 1513
De Lorenz Fries – UTA Libraries Cartographic Connections: map / texto, Dominio público, https://commons.wikimedia.org/w/index.php?curid=114780070

Mapamundi de la Geografía de 1522
De Ptolemy – " Early and Fine Printed Atlases" world maps, largely inspired from an earlier map by Martin Waldseemüller., Dominio público, https://commons.wikimedia.org/w/index.php?curid=51556151

1522

Tabu Nova Partis Aphri de 1522-1535
De Lorenz Fries – UTA Libraries Cartographic Connections: map / texto, Dominio público, https://commons.wikimedia.org/w/index.php?curid=112955264

Asia central en la Geografía de 1535
De Ptolemy; Johannes Regiomontanus; Wilibald Pirkheimer – BL Ruderman Antique Maps, Dominio público, https://commons.wikimedia.org/w/index.php?curid=51453882

Navegación de Cadamosto en el Uslegung
De Lorenz Fries – Bayerische Staatsbibliothek (BSB), Dominio público, https://commons.wikimedia.org/w/index.php?curid=38078176
Presunto Mapa de Lorenz Fries
Por imisiego en octubre 23, 2013
En mayo de 2011, en el Congreso anual de la Australian and New Zealand Map Society, el anticuario holandés Frederik Muller presentó un Mapa de su colección que, según sus investigaciones, sería obra desconocida del médico y cartógrafo Lorenz Fries, realizado antes de 1525 y destinado a la edición de la Geografía de Ptolomeo que publicó en ese mismo año el prestigioso impresor de Estrasburgo Johan Grüninger, en colaboración con el no menos famoso editor de Nuremberg, Anton Koberger. Lorenz Fries fue el continuador y difusor de la obra cartográfica de Martin Waldseemüller, dentro de un ambicioso proyecto divulgador en el que participaron humanistas como Willibald Pirckheimer y artistas como Alberto Durero. El mapa en cuestión, titulado Tabula Moderna Alterius Hemisphaerii, tiene sin duda el inconfundible “estilo” de los grabados xilográficos desarrollados entre 1507 y 1530 en dichas imprentas para varias ediciones de la Geografía de Ptolomeo, pero resulta “extraño” porque representa el Océano Pacífico en una supuesta fecha (1525) en la que la información disponible sobre esta zona y la que pudo llegar a estas ciudades de Europa central, parece a todas luces insuficiente para haber permitido esta representación. No han faltado críticas al respecto.
Reproducción del mapa “Tabula Moderna Alterius Hemisphaerii”, atribuido al cartógrafo Lorenz Fries (latinizado como Laurentius Phrisius), donde se representa el océano Pacífico. Se trata del primer mapa dedicado al océano Pacífico, donde aparecen todos los territorios comprendidos entre la línea de demarcación de Tordesillas y la longitud de las islas Molucas, situadas al Este del antimeridiano defendido por España en las juntas de Badajoz (1524). Sería también el mapa más antiguo conocido que representa Méjico como país. El autor Lorenz Fries, realizó también los mapas para las ediciones de la Geographia de Ptolomeo de 1522, 1525, 1535 y 1541, que tomó de la edición de Waldseemüller publicada en Estrasburgo en 1513, reduciéndolos de formato. El manuscrito original fue adquirido por el anticuario holandés Frederick Muller en 2009 en Sudamérica. La investigación de Muller presenta pruebas de su elaboración en esa fecha propuesta anterior a 1525: la datación del papel por el método del carbono 14, el análisis de la tinta empleada o la marca de agua del papel. Otros aspectos cartográficos permitir ían adscribirlo a Fries y, concretamente, a un manuscrito preparado para tallar la plancha de madera que debía aparecer en la edición de Estrasburgo de 1525: el estilo del mapa, en típica proyección trapezoidal “donis”; el número del mapa (51) que correspondería a un mapa adicional que finalmente no se publicó en esa edición de Ptolomeo (1525), que contiene 50 mapas; los espacios dejados en blanco, tanto en el mapa como en el reverso, para incluir motivos xilográficos y letra capitular; el estilo de redacción del texto en el reverso, similar al de otras tábulas modernas de Fries. La información a partir de la que se realizó el mapa procede de Pedro Mártir de Anglería (1516), la segunda Carta de Hernán Cortés (1522) y la carta de Maximiliano Transilvano (1523) principalmente, además de posible información oral procedente de supervivientes de la nao Victoria. En 2009 se subastó en Sotheby’s otro manuscrito, aparentemente de la misma mano, estilo y propósito, con el título de “Tabula Moderna Tartarie”, que reforzaría la idea de la autenticidad del “mapa moderno del otro hemisferio”, al ser de origen totalmente diferente al adquirido por Muller y conocido en el Reino Unido desde hace más de 40 años, y que tampoco resultaría finalmente incluido en la edición de Estrasburgo de 1525.
ían adscribirlo a Fries y, concretamente, a un manuscrito preparado para tallar la plancha de madera que debía aparecer en la edición de Estrasburgo de 1525: el estilo del mapa, en típica proyección trapezoidal “donis”; el número del mapa (51) que correspondería a un mapa adicional que finalmente no se publicó en esa edición de Ptolomeo (1525), que contiene 50 mapas; los espacios dejados en blanco, tanto en el mapa como en el reverso, para incluir motivos xilográficos y letra capitular; el estilo de redacción del texto en el reverso, similar al de otras tábulas modernas de Fries. La información a partir de la que se realizó el mapa procede de Pedro Mártir de Anglería (1516), la segunda Carta de Hernán Cortés (1522) y la carta de Maximiliano Transilvano (1523) principalmente, además de posible información oral procedente de supervivientes de la nao Victoria. En 2009 se subastó en Sotheby’s otro manuscrito, aparentemente de la misma mano, estilo y propósito, con el título de “Tabula Moderna Tartarie”, que reforzaría la idea de la autenticidad del “mapa moderno del otro hemisferio”, al ser de origen totalmente diferente al adquirido por Muller y conocido en el Reino Unido desde hace más de 40 años, y que tampoco resultaría finalmente incluido en la edición de Estrasburgo de 1525.
Desastre del Urquiola
Desastre del Urquiola
Coordenadas: 43°22′00″N 8°23′00″O
Localización
País: España
Datos generales
Tipo: petrolero
Histórico
El desastre del Urquiola fue un derrame de petróleo en Galicia provocado por el hundimiento del buque petrolero Urquiola en 1976.
El petrolero Urquiola fue protagonista, el 12 de mayo de 1976, de una de las peores catástrofes ecológicas acaecidas en España. Ese día, el buque petrolero, portando una carga de petróleo para la empresa Petrolíber, sufrió un accidente a la entrada de la ría del Burgo en Galicia, cuando quedó embarrancado al encallar contra una aguja rocosa existente a la entrada del mismo que estaba mal señalizada, según afirmó posteriormente un práctico del puerto. Aunque en ese accidente el buque no sufrió grandes daños y su capitán pidió la entrada a puerto, la Comandancia de Marina tomó la decisión de sacarlo a alta mar para alejarlo a 200 millas de la costa.
En las maniobras para su alejamiento el barco sufrió más daños y en el quinto intento de rescate se incendió y explotó. El capitán murió intoxicado al quedarse a bordo hasta el último momento. El vertido de unas 100.000 toneladas de crudo que portaba anegó las rías de Betanzos, Ferrol y Ares.
El 4 de mayo de 1982, el Parlamento aprobó una iniciativa para que la Junta de Galicia solicitara al Gobierno español el pago de indemnizaciones a los pescadores afectados por la catástrofe. Estos comenzaron a percibirlas en 1986 finalizando los últimos pagos en noviembre de 1992. En 1985 una Sentencia del Tribunal Supremo dictaminó que el costo total para las arcas públicas del desastre fue de más de 7000 millones de pesetas.1
El petrolero Urquiola
El Urquiola fue un buque petrolero de bandera española de 276,54 metros de eslora, 39,07 de manga y 15,19 de calado. Construido por Astilleros Españoles, en su factoría de Sestao (Vizcaya) fue botado en junio de 1973, tenía un peso muerto de 111.225 toneladas.2 Estando asegurado en 1.280 millones de las pesetas de entonces. La propulsión consistía en un motor principal de 25.000 BHP (Brake Horse Power, caballos efectivos de potencia al freno), cuatro generadores auxiliares para la potencia electrica del buque y tres calderas (una de generación de vapor a través de los gases de escape); podía alcanzar una velocidad máxima de 15 nudos. Llevaba tres turbo bombas que le permitían efectuar la descarga de crudo del buque en un plazo de 24 horas.
La tragedia
A las 08:20 horas del 12 de mayo de 1976 en la maniobra de entrada al Puerto de La Coruña, para efectuar la descarga en su refinería, toca unos bajos no señalados en las cartas. Ya con el barco detenido y una vez analizadas las averías, la Comandancia de Marina ordenó al Urquiola salir a la mar, lo que se produce a las 09:15 horas del mismo día. La maniobra se realiza por el mismo canal de la entrada, lo que sumado a que por la avería ocasionada en la maniobra de entrada, que le aumentaba el calado de proa en 2,5 metros, vuelve a tocar en la misma “aguja” causándole averías irreversibles que hacen que, tras una explosión registrada horas más tarde, arda por completo, consumiéndose con las llamas parte de su carga y vertiendo al mar otra parte causando una gran marea negra. Días más tarde con la ayuda del petrolero Camporraso, se trasiega al mismo el resto de la carga que todavía quedaba en su interior, en una operación bastante controvertida en su momento debido a su falta de seguridad.
Se hizo responsable de la tragedia al capitán del buque, Francisco Eduardo Rodríguez Castelo (único fallecido en la tragedia que murió de forma heroica tras las explosiones posteriores). Los tribunales lo exculparon, dando la razón a su familia, ya que ni la carta estaba actualizada y la Autoridad de Marina le obligó a ciabogar y salir por el mismo canal, con más calado por el agua embarcada tras la primera colisión, y con la marea más baja, por lo que la varada final fue inevitable.
Antecedentes de la tragedia

Entre los años 1953 y 1956 se levantó la carta n.º 9290, que se consideró la más idónea para acceder al puerto de La Coruña y fue la utilizada en la derrota del petrolero Urquiola veinte años más tarde.
Con la entrada en servicio de la refinería coruñesa (Petrolíber), en 1964, los petroleros que accedían al puerto de La Coruña fueron cada vez mayores, acentuando este hecho que, a partir del cierre del Canal de Suez en 1967, comenzaron a hacerse enormes. La Comandancia de Marina de La Coruña había sido notificada de la existencia de agujas por un buzo en 1967, y por una filial de Dragados y Construcciones en 1971. Según algunas fuentes, dos petroleros (se mencionan el Santiago y el Ildefonso Fierro) habían sufrido incidentes en ese mismo lugar aunque no tuvieron mayores consecuencias. En 1974 el capitán del Magdalena del Mar dio parte a la Comandancia sobre la existencia de la aguja rocosa que había detectado en el sonar de su barco.
Ante la posible existencia de agujas rocosas sin identificar se planteó, en 1976, realizar un nuevo levantamiento para hacer una nueva carta náutica aunque se mantiene el uso de la canal “N” para el acceso a la refinería. El Urquiola había usado, antes del accidente, este canal dieciséis veces para entrar cargado y sin novedad en “casi” todas las condiciones de marea.
Explosión y vertido
Tras el primer roce con el fondo a las 08:20 horas del 12 de mayo, y tras un primer informe de daños se detectó una entrada de crudo mezclado con agua en la cámara de bombas; se informó además que a la altura del 1E (contiguo al 1C) salía crudo al exterior, inundación en el cofferdam de proa, y a popa estribor, una pequeña pérdida de fuel al mar. Pasada una hora la situación estaba estabilizada con el petrolero adrizado y hocicado de proa unos 2,5 metros por la inundación del cofferdam y, por lo que se deduce, cuando menos del 1E. Con unos 18 metros de calado, desde el propio buque se informó a la Comandancia que era inconveniente (más bien imposible) acceder a la terminal, aunque con la sala de máquinas y la casi totalidad de los tanques de carga intactos, se podría de fondear, extender una barrera, trasegar a otro petrolero parte de la carga hasta reducir el calado y terminar el trabajo atracados al pantalán.
Hacia las 09:15 la Comandancia de Marina ordenó al Urquiola salir a la mar, con obligación de hacerlo “por el mismo canal por el que había entrado”. Semejante medida pretendía salvaguardar la ría de un desastre ecológico. Con su sobrecalado y habiendo bajado la marea 35 cm, a las 09:33, tras un choque, un enorme ruido y una fuerte vibración, el barco quedó súbitamente detenido en una situación muy próxima a donde había tocado fondo al entrar. Inmediatamente se ordenó “para” y se probó a dar avante y atrás, el buque estaban irremisiblemente trincados al fondo; días después los buceadores de la compañía de salvamento encontrarían un desgarrón en el casco de unos 60 metros de largo por 0,5 de ancho. Tras el impacto se produjo una escora de unos 10º a estribor y la proa se hundió hasta los escobenes, la brecha abierta afecto a algunos tanques de carga comenzando el vertido del crudo.
Tras evacuar a la tripulación, y tan sólo con el capitán Castelo y el práctico Sánchez Lebón a bordo, hacia las 13:53, se produjo una explosión, seguida de un pavoroso incendio. Ambos se arrojaron al mar sin poder ser rescatados por las embarcaciones. El práctico llegó a nado a la Cala del Canabal. El cadáver del capitán aparecería quemado y cubierto de petróleo dos días después.
Marea negra
Tras la explosión inicial se produjo un incendio de crudo que arrasó al petrolero durante dos días; afortunadamente, la ligereza de la carga permitió que casi sus tres cuartas partes ardieran en una descomunal hoguera o se evaporaran sin más. En su extinción definitiva tendrían una actuación destacada el CASI de Ferrol y el remolcador de la Armada RA-1.
Una vez estabilizada la situación, el petrolero Camporraso se amarró a boyas a cien metros escasos del casco del petrolero siniestrado y con la intervención del buque de salvamento holandés Smit Lloyd 106, se trasegó unas 7.700 toneladas de crudo que le quedaban a bordo. Esta operación fue criticada por falta de seguridad. Otras 4500 toneladas fueron recogidas a flote o en las playas, pero la carga restante se extendió por las rías de Ferrol, Ares y Betanzos arruinando la pesca durante una temporada; para desgracia de la fauna marina, entre 10.000 y 15.000 toneladas fueron tratadas en la mar con dispersantes y otras 2.000 quedaron pegadas a la costa reforzando el negro de los percebes.
El honor del capitán Castelo
Para el difunto capitán al principio todo fueron elogios: a los siete días de su muerte ya se le había concedido una Cruz del Mérito Naval a título póstumo y a los veinte la Medalla de Oro del Mérito Social Marítimo, pero posteriormente una sentencia de acuerdo con la Ley Penal y Disciplinaria de la Marina Mercante, hace “directamente responsable” del mismo al capitán, al jefe de máquinas y al 1º oficial, y subsidiariamente al 3º oficial y al 1º oficial de máquinas del Urquiola.
En 1979 el Ministerio de Defensa denegó por transcurso de plazo la indemnización solicitada por la viuda de Castelo y esta acudió a tribunales llegando el caso a la Sala Cuarta del Tribunal Supremo, que declaró probado que la muerte de Castelo se había producido a consecuencia de una sucesión de acontecimientos ocasionados por el mal funcionamiento de la Administración. En su Sentencia de 18 de julio de 1983 la Sala puntualizó que ello había acontecido
…sin que en esta serie encadenada de acontecimientos interviniera culpa o negligencia del citado capitán, que cumplió en todo momento con los deberes de su cargo de manera irreprochable y con tal dedicación y heroísmo que perdió su vida por su fidelidad a las tradicionales virtudes de los hombres de la mar y de su profesión de capitán de la Marina Mercante, a la cual honró en conducta ejemplar compartida por el práctico…
La sentencia sentó las bases para que las compañías aseguradoras ejercieran acción de regreso contra el Estado, que hubo de indemnizarlas en virtud de otra Sentencia del Supremo de fecha 6 de marzo de 1985. Posteriormente se erigió un monumento en un lugar de la ciudad de La Coruña, próximo al de la tragedia, dedicado al fallecido capitán Castelo.
El buque tras el accidente

Los restos del Urquiola, tras ser reflotados, fueron trasladados al puerto de Ferrol donde se desguazó la proa y se reutilizó la parte de popa, que tenía la sala de máquinas casi intacta, que fue usada en el buque bulkcarrier Argos botado en 1983.3 Esta nave pasó en 1988 a la Naviera Vizcaína con el nombre de Urduliz. El 29 de agosto de 1983 el Urduliz tuvo un incidente con el portaaviones nuclear de la armada de EE. UU. Dwight D. Eisenhower en el puerto de Hampton Roads cuando estaba esperando turno para cargar carbón en Norfolk.
En 1984 el Urduliz cambió de armador pasando a E.N. Elcano con el nombre de Castillo de Quermensó y pabellón de Bahamas estando en activo hasta el año 2002 que fue desguazado en Bangladés.
La confusión interesada
Desde el primer momento, las autoridades marítimas causantes de la desgracia se dedicaron a desviar y confundir a la opinión pública. Tres días después del accidente, el ministro de Obras Públicas afirmaba en La Voz de Galicia que el accidente del Urquiola es totalmente ajeno al puerto coruñés. Algo más tarde, el 26 de mayo, ahora en El Ideal Gallego, el contralmirante director del Instituto Hidrográfico de la Marina declaraba: Es improbable la existencia de una piedra desconocida en el canal. Al día siguiente, en el mismo diario, el contralmirante que ejercía de director general de Navegación apostillaba: Yo no creo demasiado en esa aguja misteriosa. Pudo haber acontecido una pequeña explosión interna que originase el boquete.
Con el fin de justificar la decisión de alejar el buque, que fue la verdadera causa de la catástrofe, se mintió y manipuló a una opinión pública inexperta repitiendo una y otra vez que, de otra forma, el buque podría haber explotado en la refinería de La Coruña causando decenas de muertos.
El informe del instructor del caso
Como el código de Justicia Militar aplicable entonces permitía juzgar a un muerto, se abrió consejo de guerra para determinar las responsabilidades del caso. La Armada nombró un juez instructor encargado de la Causa 106/76, instruida con motivo de la varada del petrolero Urquiola en la Bahía de la Coruña. El designado fue el capitán de navío (CN) Isidro Fontenla Roji, quien realizó un trabajo extenso y asombroso: 1052 folios por las dos caras, más 83 folios con el Resumen de los hechos, más un montón de documentos anexos. Las bochornosas conclusiones a que llega el informe, terminado dos años después del accidente, todavía despiertan indignación. Una a una fueron desmentidas por la sentencia del Tribunal Supremo de 18 de julio de 1983.
Isidro Fontenla no estuvo a la altura de las circunstancias. No supo ver que tenía en sus manos el accidente marítimo de la Transición y redactó un informe sesgado y parcial, de puro y duro estilo franquista, que seguramente (¿No había ocurrido siempre así en los cuarenta años de gobierno del general Franco?) él creyó incontestable e indiscutible. También ahí se equivocó. El informe era simplemente patético, hasta el punto de que la Administración ni siquiera lo tuvo en cuenta durante el proceso en el Tribunal Supremo.
Por un lado, el instructor consideró incompetente y errónea la navegación que el buque realizaba al entrar en puerto, así como las reacciones de la dotación ante el accidente. Tirando de diccionario de sinónimos, el informe arremete contra los oficiales y el capitán del buque y concluye que el accidente les produjo (repare el lector en el etcétera final):
Incoherencias, indecisiones, impresiones, titubeos, contradicciones, errores, desconocimientos, equivocaciones, confusiones, precipitaciones, desaciertos, dudas, incertidumbres, nervios, sustos y miedos, etc.
Por el contrario, las actuaciones de la Comandancia de Marina se presupusieron correctas o, más simplemente, ni siquiera se examinaron, como tampoco se tomaron en consideración los hechos que claramente demostraban su responsabilidad. Se ignoraron las denuncias previas al accidente acerca de la existencia de bajos no señalizados en el canal, a pesar de que constaban de forma fehaciente, y, sobre todo, no se analizó si la orden de salir a la mar de inmediato tenía algún sentido, qué se perseguía con ella, qué beneficios hubiera podido acarrear y por qué se adoptó sin oír previamente al capitán del buque. En realidad, se contempló sólo una parte del siniestro, la que tuvo lugar antes de tocar fondo, lo cual dejaba fuera a las autoridades y ponía el foco en el buque, el capitán y la tripulación. Lo demás, cuanto sucedió a partir de ese momento, se ignoró por completo. Algo similar se hizo años después cuando el AEGENA SEA embarrancó frente a la Torre de Hércules y lo mismo hicieron los redactores del informe de la Comisión Permanente de Investigación de Siniestros Marítimos en el naufragio del PRESTIGE.
Unos meses después del accidente del URQUIOLA, el Instituto Hidrográfico de la Marina oficialmente reconoció la existencia en el canal, no de una sino de nueve agujas como la que rajó el casco del Urquiola. Conociendo ese dato, el instructor incluyó en su informe una serie de comentarios bochornosos acerca del concepto de canal y enfilación y sobre el valor de las cartas náuticas.
Para rematar su informe, el instructor recomendó someter al capitán y oficiales del buque a un consejo de guerra:
… por infracción de medidas de seguridad, de acuerdo con el artículo 62 de la Ley Penal y Disciplinaria de la Marina Mercante, resultan directamente responsables el capitán del Urquiola, don Francisco Rodriguez Castelo, el Jefe de Máquinas, don Angel Urizar Aramburu y el Primer Oficial de Puente don Eugenio Tesouro Fernandez, así como subsidiariamente el Tercer Oficial de Puente don Miguel Angel Gomez Peña y el Primer Oficial de Máquinas don José Caamaño Dominguez.
No satisfecho con empapelar a tanta gente, el informe proponía también (folios 1120 a 1124) el enjuiciamiento, en aplicación de los artículos 315 y 317 del Código de Justicia Militar y de los artículos 453 y 457, 462 y 463 del Código Penal Común, de diversos periódicos («El Correo Español», «La Gaceta del Norte», la «Hoja del Lunes» de La Coruña), de algunos oficiales del URQUIOLA que habían realizado declaraciones en medios de comunicación comentando sus experiencias, de un profesor de la Escuela de Náutica de La Coruña por la misma razón, (declaraciones la mar de moderadas y cargadas de razón) y de los firmante del libro URQUIOLA, la verdad de una catástrofe, los tres marinos que dirigían entonces la organización de SLMM. Y ya puestos, afirma sobre la prensa toda que, de sus informaciones, incluso gráficas, se deduce en general una clara tendencia hostil a la administración en sus autoridades. Por ello se estima como conveniente la aplicación de lo dispuesto en el artículo 465 del Código Penal Común reclamando la oportuna satisfacción.
El URQUIOLA entraba perfectamente por el canal del Este o de Seixo Blanco y las agujas no señalizadas se encontraban en pleno canal. El CN Fontenla sabía perfectamente todo esto. Tan sólo su obcecación por no reconocer la culpabilidad de sus compañeros de armas y superiores le llevó a conclusiones tan disparatadas, ridículas y lesivas para los profesionales de la marina mercante.
La sentencia del Tribunal Supremo que selló el caso
Tras el indulto, la viuda de l capitán solicitó al Tribunal Supremo una declaración expresa de que su marido había actuado con total profesionalidad, lo que permitió al más alto órgano judicial sentenciar que los hechos que se dejan probados acreditan que el fallecimiento del Capitán del Urquiola se produjo a consecuencia de una sucesión temporal de acontecimientos que se inició con el primer choque de la quilla de dicho barco ocasionada por el anormal funcionamiento del servicio público de cartografía marina y de información sobre el mar y litoral y culminó con dicho fallecimiento, que pudo haber sido evitado con el funcionamiento normal del servicio público de ordenación, seguridad y salvamento marítimos, sin que en esa serie encadenada de acontecimientos interviniera culpa o negligencia del citado Capitán. (TST de 18 de julio de 1983).
l capitán solicitó al Tribunal Supremo una declaración expresa de que su marido había actuado con total profesionalidad, lo que permitió al más alto órgano judicial sentenciar que los hechos que se dejan probados acreditan que el fallecimiento del Capitán del Urquiola se produjo a consecuencia de una sucesión temporal de acontecimientos que se inició con el primer choque de la quilla de dicho barco ocasionada por el anormal funcionamiento del servicio público de cartografía marina y de información sobre el mar y litoral y culminó con dicho fallecimiento, que pudo haber sido evitado con el funcionamiento normal del servicio público de ordenación, seguridad y salvamento marítimos, sin que en esa serie encadenada de acontecimientos interviniera culpa o negligencia del citado Capitán. (TST de 18 de julio de 1983).
La misma sentencia califica duramente la decisión de la autoridad de marina de alejar el buque después de su primera tocada de fondos, una orden apresurada, incompetente, irrazonable y absurda.
Ello llevó a que, finalmente, el Estado español fuera condenado a indemnizar tanto al armador del buque por la pérdida de éste, como a los propietarios del crudo derramado.
Para entonces, los cargos responsables se habían jubilado y desde luego nadie dentro de la burocracia marítima tomó nota del mal que se había causado, a saber, adoptar una política de alejamiento del riesgo sin análisis ni reflexión ninguna. Veintiséis años después, ante una situación en esencia idéntica, la avería del PRESTIGE, la Administración demostraría que no había aprendido nada de la experiencia del URQUIOLA.
El día que llovió petróleo en A Coruña LA OPINIÓN


Primera explosión en el Urquiola frente al puerto de A Coruña. Imagen extraída de http://fotosdelpasado-jm.blogspot.com

El petrolero Urquiola recién construido en la ria de Bilbao. Imagen extraída de https://www.grijalvo.com

Humareda del Urquiola en A Coruña. Imagen extraída de http://fotosdelpasado-jm.blogspot.c om
om
El capitán y el practico se arrojan al mar desde una altura de 15 metros, el capitán apareció muerto dos días después y el practico consiguió alcanzar la costa de Mera después de nadar la distancia de 2 kilómetros durante 3 horas.
Se produjo una pavoroso incendio que lleno de una negra humareda los cielos de A Coruña, Betanzos, Ares y Ferrol, arrojando al mar toneladas de crudo que tiñeron de negro nuestras costas por un largo periodo de tiempo.15 toneladas de crudo fueron tratadas con dispersantes y 2.000 toneladas pasaron a formar parte del paisaje costero gallego.
Imagen de la ciudad de La Coruña bajo el humo del Urquiola. Imagen extraída de http://fotosdelpasado-jm.blogspot.com
Pietro Coppo
Pietro Coppo

El mapa del mundo de Pietro Coppo (1520)
Pietro Coppo (1469/70 – 1555/56; latín : Petrus Coppus) fue un italiano geógrafo y cartógrafo que escribió una descripción del mundo entero conocido en el siglo XVI, acompañado de un conjunto de mapas dispuestos sistemáticamente, uno de los primeros rutters y también una descripción precisa de la Istria península de, acompañada de su primer mapa regional.
Vida
Pietro Coppo nació en Venecia y estudió con Marcus Antonius Coccius Sabellicus. También estuvo profundamente influenciado por la Historia Natural de Plinio.[1] Después de varios viajes por Italia y el Mediterráneo y un período de seis años que pasó en Creta,[2] en 1499 se trasladó a Izola debido a sus obligaciones laborales como escribano municipal, donde se casó con Colotta di Ugo de una rica familia Izola. Estuvo activo en la vida pública de la localidad, donde ejerció como notario, y también la representó en varias ocasiones ante el Dogo de Venecia.[3]
De toto orbe
El trabajo principal de Coppo fue la descripción, acompañada de un atlas de 22 mapas, de todo el mundo conocido, titulado De toto orbe. Fue escrito en cuatro volúmenes desde 1518 hasta 1520 y también incluía el contorno de la costa de las Américas, un secreto militar en ese momento,[3] pero permaneció inédito.[4] Las dos muestras conservadas de la obra se conservan en Bolonia ( Biblioteca comunale dell’Archiginnasio) y en París ( Bibliothèque nationale de France).[5]
En todo el mundo
Desde 1524 hasta 1526, Coppo preparó una versión abreviada de De toto orbe bajo el título De Summa totius Orbis. Este trabajo contenía 15 mapas grabados en madera dispuestos sistemáticamente, llamados Tabulae (“tablas”), para ser publicados en un libro, representando así el primer “moderno” atlas, aunque esta distinción se otorga convencionalmente a Abraham Ortelius.[6] Se ha conservado en tres copias, conservadas en Venecia, París y Piran. Solo el manuscrito de Piran contiene los mapas.[7]
Portolano
En 1528 publicó la obra Portolano, una de las primeras rutinas del mundo. Aunque no se conserva en su totalidad (probablemente debido al uso frecuente), sus copias se han conservado en Piran, Parish y Londres (el Museo Británico).[2]
Del sito de l’Istria
En su descripción de Istria (Del sito de l’Istria; 1529, publicado en 1540, Venecia), publicó la primera descripción geográfica y una copia del primer mapa regional de Istria, producido en 1525 y ya incluido en De Summa totius Orbis.[2] Su copia inscrita en piedra ahora se puede ver en el Parque Pietro Coppo en el centro de la ciudad de Izola en el suroeste de Eslovenia.[8] [2]
Códice Piran
En el dos manuscritos de De Summa totius Orbis y Portolano se conservan, encuadernados en un solo bloque de texto, junto con mapas grabados en madera impresos Museo Marítimo Sergej Mašera de Piran. Esta es probablemente la obra cartográfica más preciosa que se conserva en Eslovenia y considerada patrimonio cultural de clase mundial. Es único principalmente porque a diferencia de otras obras de Coppa conservadas, contiene 15 mapas grabados en madera coloreados y dispuestos sistemáticamente.[9] [6]
En 1520, el cartógrafo y geógrafo italiano Pietro Coppo diseñó un mapamundi como se conocía en el siglo XVI. Este mapa en particular es el último en el que aparece la “Cola del Dragón”, la larga extremidad que sale de la parte oriental de Asia y se inclina hacia el sur. Este mapa es interesante porque muestra la visión del geógrafo Claudio Ptolomeo de un Océano Índico casi sin salida al mar, algo que ilustró más de 1500 años antes del trabajo de Coppo en el siglo XVI.
Se hizo un nombre particularmente con sus obras del campo de la cartografía. Escribió cuatro trabajos extensos y para aquellos tiempos muy avanzados:
– De toto orbe (1518-1520)
– El más grande del mundo entero (1524-1526)
– Portolano (1528) en
– Del Sito de Listria (1529, 1540)
El Museo Marítimo »Sergej Mašera« Piran tiene manuscritos muy valiosos de dos de sus obras: De Summa totius orbis y Portolano. Ambos están encuadernados en un bloque de libro, con 15 mapas a color adjuntos. Este trabajo se llama Código Piran.
De Summa totius orbis está escrito en latín y comprende una revisión del mundo entero que conocía en ese momento. Portolano, en cambio, está escrito en italiano; comprende una descripción de los lugares e islas litorales del Mar Mediterráneo y los que se encuentran fuera del Estrecho de Gibraltar, junto con las distancias entre los lugares, los vientos locales y otros detalles. Este trabajo estaba destinado principalmente a ayudar a la gente de mar durante sus viajes.
orbis está escrito en latín y comprende una revisión del mundo entero que conocía en ese momento. Portolano, en cambio, está escrito en italiano; comprende una descripción de los lugares e islas litorales del Mar Mediterráneo y los que se encuentran fuera del Estrecho de Gibraltar, junto con las distancias entre los lugares, los vientos locales y otros detalles. Este trabajo estaba destinado principalmente a ayudar a la gente de mar durante sus viajes.
Histriae tabula (1573)

De especial importancia entre sus mapas es el Mapa de Istria, ya que resulta ser el mapa provincial más antiguo que se conserva de esta península y la visualización detallada más antigua de cualquier parte del territorio esloveno. Fue realizado en 1525.
Echa un vistazo al mapa de Istria. Notarás que difiere un poco de los mapas modernos. Trate de encontrar y marcar en él las ciudades de Piran, Izola, Koper, Trieste, Poreč (Parenzo), Vodnjan (Dignano) y Pula (Pola).
Los mapas grabados en madera de 15 colores de Coppo, reunidos en el Código Piran, representan el mundo entero que conocía en ese momento y es uno de los primeros intentos de publicar un atlas impreso. Los originales de las obras de Coppo, conservados en el Museo Marítimo de Piran, se conservan en condiciones especiales debido a su extremado valor y antigüedad y sólo se pueden ver en ocasiones excepcionales.
Vela
Vela
Serie de Observatorios
Vela era el nombre de un grupo de satélites desarrollados como el elemento Vela Hotel del Proyecto Vela por los Estados Unidos para detectar detonaciones nucleares y monitorear el cumplimiento del Tratado de Prohibición Parcial de Pruebas de 1963 por parte de la Unión Soviética.
Satélite Vela 5B en órbita.
País de origen: Estados Unidos
Operador: Fuerza Aérea de EE. UU.
Aplicaciones: Reconocimiento
Especificaciones
Régimen: Órbita muy elíptica
Vida de diseño: 15 años
Estado: Retirado
Lanzado: 12
Operacional: 0
Retirado: 12
Lanzamiento inaugural: Vela 1A
Último lanzamiento: Vela 6B
Programa: Proyecto Vela & Integrated Operational Nuclear Detection System (IONDS).
Campo: Satélite de reconocimiento
Lanzamiento: 1963 hasta 1970
Lanzacohetes: Atlas – Agena – Titan IIIC
Fin de la misión: 1984
Duración: 15 años
Misa en el lanzamiento: de 150 a 261 kg
Vela comenzó como un programa de investigación de bajo presupuesto en 1959. Terminó 26 años después como un sistema espacial militar exitoso y rentable, que también proporcionó datos científicos sobre fuentes naturales de radiación espacial. En la década de 1970, la misión de detección nuclear fue asumida por los satélites del Programa de Apoyo a la Defensa (DSP). A fines de la década de 1980, se amplió con los satélites del Sistema de posicionamiento global (GPS) Navstar. El programa ahora se llama Sistema Operativo Integrado de Detección NuDet (Detonación Nuclear) ( IONDS).
Despliegue
Se construyeron doce satélites, seis del diseño del Vela Hotel y seis del diseño Advanced Vela. La serie Vela Hotel fue para detectar pruebas nucleares en el espacio, mientras que la serie Advanced Vela fue para detectar no solo explosiones nucleares en el espacio sino también en la atmósfera.
Todas las naves espaciales fueron fabricadas por TRW y lanzadas en pares, ya sea en un propulsor Atlas – Agena o Titan III -C. Fueron colocados en órbitas de 118.000 km (73.000 millas),[1] muy por encima de los cinturones de radiación de Van Allen. Su apogeo fue aproximadamente un tercio de la distancia a la Luna. El primer par de Vela Hotel se lanzó el 17 de octubre de 1963,[2] una semana después de que entrara en vigencia el Tratado de Prohibición Parcial de Pruebas, y el último en 1965. Tenían una vida útil de seis meses, pero solo se cerraron después de cinco años. Los pares Advanced Vela se lanzaron en 1967, 1969 y 1970. Tenían una vida útil nominal de diseño de 18 meses, que luego se cambió a siete años. Sin embargo, el último satélite que se apagó fue el Vehículo 9 en 1984, que se había lanzado en 1969 y había durado casi 15 años.
La serie Vela comenzó con el lanzamiento de Vela 1/2 el 17 de octubre de 1963, un vuelo que también marcó el viaje inaugural del vehículo Atlas-Agena SLV-3. El segundo par de satélites se lanzó el 17 de julio de 1964 y el tercero el 20 de julio de 1965. El último lanzamiento falló levemente cuando un motor vernier Atlas se apagó en el despegue, mientras que el otro nonio operaba a niveles de empuje por encima de lo normal. Esto resultó en una inclinación ligeramente más baja de lo normal para los satélites, sin embargo, la misión se llevó a cabo con éxito. El problema se debió a un mal funcionamiento de la válvula de asiento a vernier LOX.
Los satélites Vela posteriores se cambiaron al propulsor Titan IIIC debido a su mayor peso y complejidad. Se lanzaron tres conjuntos más el 28 de abril de 1967, el 23 de mayo de 1969 y el 8 de abril de 1970. El último par de satélites Vela operó hasta 1985, cuando finalmente se cerraron, la Fuerza Aérea afirmó que eran los más antiguos del mundo en funcionamiento. Permanecieron en órbita hasta su descomposición a fines de 1992.
Instrumentos
El satélite Vela- 5A / B en su sala blanca. Los dos satélites, A y B, se separaron después del lanzamiento.
5A / B en su sala blanca. Los dos satélites, A y B, se separaron después del lanzamiento.
Los satélites Vela originales estaban equipados con 12 detectores de rayos X externos y 18 detectores internos de neutrones y rayos gamma. Estaban equipados con paneles solares que generaban 90 vatios.
Los satélites Advanced Vela estaban equipados adicionalmente con dos sensores de fotodiodo de silicio sin imágenes llamados bhangmetros que monitoreaban los niveles de luz en intervalos de menos de milisegundos. Podrían determinar la ubicación de una explosión nuclear dentro de aproximadamente 3,000 millas. Las explosiones nucleares atmosféricas producen una firma única, a menudo llamada “curva de doble joroba”: un destello corto e intenso que dura alrededor de 1 milisegundo, seguido de una segunda emisión de luz mucho más prolongada y menos intensa que toma una fracción de segundo a varios segundos. El efecto se produce porque la superficie de la primera bola de fuego es rápidamente superada por la onda de choque atmosférica en expansión compuesta de gas ionizado. Aunque emite una cantidad considerable de luz en sí mismo, es opaco y evita que la bola de fuego mucho más brillante brille a través. A medida que la onda de choque se expande, se enfría y se vuelve más transparente, lo que permite que la bola de fuego mucho más caliente y brillante vuelva a ser visible.
No solo fenómeno natural se conoce la producción de esta firma, aunque se especuló con que el Velas podría grabar excepcionalmente raros eventos dobles naturales, tales como un meteoro huelga en la nave espacial que produce un destello brillante o desencadenante en un rayo Superbolt en la atmósfera de la Tierra, como pudo haber ocurrido en el incidente de Vela.[3] [4] [5]
También estaban equipados con sensores que podían detectar el pulso electromagnético de una explosión atmosférica.
Se requería energía adicional para estos instrumentos, y estos satélites más grandes consumían 120 vatios generados a partir de paneles solares. Por casualidad, los satélites Vela fueron los primeros dispositivos en detectar explosiones de rayos gamma cósmicos.
Observaciones controvertidas
Alguna controversia todavía rodea al programa Vela ya que el 22 de septiembre de 1979 el satélite Vela 5B (también conocido como Vela 10 y OPS 6911[6]) detectó el característico destello doble de una explosión nuclear atmosférica cerca de las Islas Príncipe Eduardo. Aún explicado de manera insatisfactoria, este evento se conoce como el Incidente de Vela. El presidente Jimmy Carter inicialmente consideró que el evento era evidencia de una prueba nuclear conjunta de Israel y Sudáfrica, aunque el informe ahora desclasificado de un panel científico que posteriormente nombró mientras buscaba la reelección concluyó que probablemente no fue el evento de una explosión nuclear.[cita requerida] Una explicación alternativa implica un evento magnetosférico que afecta a los instrumentos.
Un incidente anterior ocurrió cuando una intensa tormenta solar el 4 de agosto de 1972 activó el sistema en modo evento como si hubiera ocurrido una explosión, pero esto fue rápidamente resuelto por el personal que monitoreaba los datos en tiempo real. [7]
En 2018, un nuevo estudio confirmó que es muy probable que se tratara de una prueba nuclear, realizada por Israel. [8] [9]
Vela 5A y 5B
El detector de rayos X de centelleo (XC) a bordo del Vela 5A y su Vela 5B gemelo constaba de dos cristales de NaI (Tl) de 1 mm de espesor montados en tubos fotomultiplicadores y cubiertos por una ventana de berilio de 0,13 mm de espesor. Los umbrales electrónicos proporcionaron dos canales de energía, 3–12 keV y 6–12 keV.[10] Además del anuncio de rayos X de Nova indicado arriba, el detector XC a bordo del Vela 5A y 5B también descubrió y anunció la primera explosión de rayos X jamás reportada.[11] El anuncio de este descubrimiento precedió al anuncio inicial del descubrimiento de explosiones de rayos gamma en 2 años. Delante de cada cristal había un colimador de listones que proporcionaba un ancho completo a la mitad de la apertura máxima (FWHM) de ~ 6,1 × 6,1 grados. El área efectiva del detector fue de ~ 26 cm 2. Los detectores escanearon un gran círculo cada 60 segundos y cubrieron todo el cielo cada 56 horas.[12] La sensibilidad a las fuentes celestes estaba severamente limitada por el alto fondo intrínseco del detector, equivalente a aproximadamente el 80% de la señal de la Nebulosa del Cangrejo, una de las fuentes más brillantes del cielo en estas longitudes de onda.[12]
El detector de rayos X satelital Vela 5B siguió funcionando durante más de diez años.
Vela 6A y 6B
Al igual que los satélites Vela 5 anteriores, los satélites de detección de pruebas nucleares Vela 6 formaban parte de un programa dirigido conjuntamente por los Proyectos de Investigación Avanzada del Departamento de Defensa de EE. UU. Y la Comisión de Energía Atómica de EE. UU., Administrado por la Fuerza Aérea de EE. UU. Las naves espaciales gemelas, Vela 6A y 6B, se lanzaron el 8 de abril de 1970. Se utilizaron datos de los satélites Vela 6 para buscar correlaciones entre estallidos de rayos gamma y eventos de rayos X. Se encontraron al menos dos buenos candidatos, GB720514 y GB740723. Los detectores de rayos X fallaron en Vela 6B el 27 de enero de 1972 y en Vela 6A el 12 de marzo de 1972.
Papel de Vela en el descubrimiento de estallidos de rayos gamma
El 2 de julio de 1967, a las 14:19 UTC, los satélites Vela 4 y Vela 3 detectaron un destello de radiación gamma diferente a cualquier firma de armas nucleares conocida.[13] Sin saber qué había sucedido pero sin considerar el asunto particularmente urgente, el equipo del Laboratorio Científico de Los Alamos, dirigido por Ray Klebesadel, archivó los datos para su investigación. A medida que se lanzaron satélites Vela adicionales con mejores instrumentos, el equipo de Los Alamos continuó encontrando explosiones inexplicables de rayos gamma en sus datos. Al analizar los diferentes tiempos de llegada de las ráfagas detectadas por diferentes satélites, el equipo pudo determinar estimaciones aproximadas para las posiciones del cielo de dieciséis ráfagas[14] y descartar definitivamente un origen terrestre o solar. Contrariamente a la creencia popular, los datos nunca se clasificaron.[15] Después de un análisis exhaustivo, los hallazgos se publicaron en 1973 como un artículo de Astrophysical Journal titulado “Observaciones de estallidos de rayos gamma de origen cósmico”.[14] Esto alertó a la comunidad astronómica sobre la existencia de explosiones de rayos gamma (GRB), ahora reconocidos como los eventos más violentos del universo.
Lanzamientos
| Historial de lanzamiento | |||||||
| N º de pedido. | Satélite | Fecha de lanzamiento | Lanzacohetes | Masa | Instrumentos | ID de Cospar | Comentario |
| 1 | Vela 1A | 17 de octubre de 1963 | Atlas Agena -D | 150 kilogramos | 3 instrumentos | 1963-039A | |
| 2 | Vela 1B | 1963-039C | |||||
| 3 | Vela 2A | 17 de julio de 1964 | Atlas Agena -D | 150 kilogramos | 8 instrumentos | 1964-040A | |
| 4 | Vela 2B | 1964-040B | |||||
| 5 | Vela 3A | 20 de julio de 1965 | Atlas Agena -D | 150 kilogramos | 8 instrumentos | 1965-058A | |
| 6 | Vela 3B | 1965-058B | |||||
| 7 | Vela 4A | 28 de abril de 1967 | Titán -3C | 231 kilogramos | 9 instrumentos | 1967-040A | |
| 8 | Vela 4B | 1967-040B | |||||
| 9 | Vela 5A | 23 de mayo de 1969 | Titán -3C | 259 kilogramos | 8 instrumentos | 1969-046D | |
| 10 | Vela 5B | 1969-046E | |||||
| 11 | Vela 6A | 8 de abril de 1970 | Titán -3C | 261 kilogramos | 8 instrumentos | 1970-027A | |
| 12 | Vela 6B | 1970-027B | |||||
Avance del proyecto
El proyecto Vela, luego el programa del Sistema Integrado de Detección Nuclear Operativa (IONDS) lanzado por los Estados Unidos para monitorear la aplicación del Tratado de Prohibición Parcial de Ensayos Nucleares firmado en 1963, tiene tres componentes: Vela Uniform debe monitorear las señales sísmicas emitidas por un prueba nuclear subterránea, Vela Sierra detecta pruebas atmosféricas desde el suelo, mientras que Vela Hotel debe detectar las mismas pruebas desde el espacio. El Proyecto Vela es desarrollado por DARPA y supervisado por la Fuerza Aérea de los Estados Unidos . El nombre Vela se elige en referencia a la constelación de las Velas. Doce satélites, en dos subseries, son construidos por la empresa TRW. Los instrumentos están siendo desarrollados por el Laboratorio Nacional de Los Alamos, que ha adquirido experiencia en el desarrollo de detectores de rayos cósmicos y rayos gamma mediante el desarrollo de cargas útiles para cohetes de sondeo.
Despliegue
Los satélites son lanzados por parejas por lanzadores Atlas / Agena en 1963 (Vela 1), 1964 (Vela 2) y 1967 (Vela 3). Versiones posteriores más pesadas por cohetes Titan IIIC en 1967 (Vela 4), 1969 (Vela 5) y 1970 (Vela 6). Se colocan en una órbita circular alta (altitud 137.000 km) con una inclinación orbital de 36 °. Cada par circula en la misma órbita pero ocupa una posición opuesta (a 180 °) para garantizar en conjunto una vigilancia completa de la superficie del globo.
Los satélites Vela han cumplido por completo sus objetivos y también han aportado información científica que ha tenido un impacto significativo en el campo de la astronomía (viento solar, estallido de rayos gamma). Todos los satélites funcionaron al menos 10 veces más que la duración para la que fueron diseñados (6 meses). Los satélites de la versión mejorada (Vela 5 y 6) funcionaron hasta que fueron puestos voluntariamente fuera de servicio el 27 de septiembre de 1984 casi 15 años después de su lanzamiento.
Características técnicas
El satélite Vela tiene la forma de un poliedro regular de 26 lados cuyo cuerpo está cubierto de células solares que generan 120 vatios. Se estabiliza por rotación a razón de 2 revoluciones por segundo (primeras versiones) y luego 1 revolución por segundo para las versiones Vela 5 y 6. Su masa está entre 150 kg (Vela 1) y 261 kg (Vela 6). El par de satélites incluye un motor de apogeo responsable de colocar el satélite en su órbita final.
Instrumentos

Estructura interna de un satélite Vela.

Primer plano de 2 satélites Vela poco antes de su lanzamiento.
Satélites 1A a 4B
Detector de rayos x
Instrumento presente en satélites de Vela 1A
Detector de rayos gamma
Instrumento presente en satélites de Vela 1A
Detector de neutrones
Instrumento presente en satélites de Vela 1A
El detector de neutrones identifica tanto los neutrones generados por una explosión nuclear como los de origen espacial (subproductos de los rayos cósmicos, otros). Con este instrumento se midieron electrones con una energía entre 1 y 100 MeV.
Experimento de viento solar
Instrumento presente en satélites de Vela 4A
El instrumento está compuesto por 4 contadores Geiger y un analizador electrostático que permite el estudio del viento solar y los electrones de baja energía del espacio interplanetario y la cola de la magnetosfera. Se utilizaron contadores Geiger para medir el flujo y la distribución angular de electrones con energía superior a 45 keV.
Espectrómetro de electrones de protones ⇒ Analizador electrostático y tubos Geiger
Instrumento presente en los satélites Vela 2A a 3B
Medida de la distribución angular y del espectro energético de partículas en la magnetosfera y el viento solar. Un contador Geiger cuenta electrones con energía superior a 45 keV. Un analizador electrostático mide la energía de iones y electrones según una cuadrícula de 16 valores entre 0,3 y 20 keV y evalúa aproximadamente su distribución angular con respecto al Sol.
Detector de radiación de fondo
Instrumento presente en los satélites Vela 2A y 2B
Contador de rayos X de centelleador
Instrumento presente en satélites de Vela 3A
Este instrumento se utiliza para medir el flujo de rayos X emitidos por el sol. También se utiliza para medir el flujo integrado de protones entre 3 y 100 MeV.
Detector de circuito estático
Instrumento presente en satélites de Vela 2A
Este instrumento mide la intensidad, distribución, variaciones de tiempo y espectro de energía de los electrones presentes en la región de transición y en la cola de la magnetosfera. Las partículas medidas son electrones cuya energía está entre 45 y 430 keV y protones entre 180 y 570 keV. En la versión a bordo del Vela 3A, la medición toma electrones cuya energía está entre 30 y 475 keV y protones entre 180 y 570 keV. En la versión a bordo del Vela 4A, la medida transporta los electrones cuya energía está entre 30 y 700 keV.
Tubos Geiger
Instrumento presente en los satélites Vela 2A a 3B
Este detector se utiliza para analizar casos en los que el detector de circuito estático identifica electrones y protones de la misma energía.
Magnetómetro
Instrumento presente en los satélites Vela 2A a 3B
El magnetómetro mide el campo magnético en un solo eje perpendicular al eje de rotación del satélite. La sensibilidad del detector cubre el rango 0-63 gamma.
Detector de rayos X y gamma con centelleadores
Instrumento presente en satélites de Vela 4A
Detector ultravioleta extremo
Instrumento presente en satélites Vela de 3A
Telescopio de partículas energéticas de circuito sólido
Instrumento presente en satélites de Vela 4A
El instrumento incluye 4 detectores de partículas tipo semiconductor, un tubo fotomultiplicador y un centelleador anti-coincidencia con un campo óptico de 30 °. Se utiliza para medir la intensidad y dirección de protones con energía entre 0,5 y 100 MeV y núcleos alfa con energía entre 12 y 400 MeV.
Satélites 5A a 6B
Uno de los instrumentos del satélite Vela 5B.
Detector ultravioleta extremo
Dos detectores miden la radiación ultravioleta extrema emitida por el Sol respectivamente en las longitudes de onda de 30 a 150 A y 120 a 900 A. El instrumento reproduce el espectro aproximado del flujo.
Detector de rayos X solar
Telescopio de partículas solares
El instrumento se utiliza para medir la intensidad y dirección de los protones solares con energía entre 0,3 y 50 MeV y núcleos alfa solares con energía entre 2 y 100 MeV . Permite identificar y medir los flujos de núcleos de deuterio, tritiul y helio-3. El instrumento incluye 3 telescopios orientados a 45 °, 90 ° y 135 ° con respecto al eje de rotación del satélite. Cada telescopio incluye un tubo colimador con un campo óptico de 30 ° y un detector de partículas de tipo circuito sólido.
Detector de electrones
Viento solar
Rayos cósmicos
Detector de neutrones
Astronomía de rayos gamma
Historial de lanzamiento
Lanzamiento de Vela 3A y 3B por un cohete Atlas Agena -D el 20 de julio de 1965.
Resultados científicos
La primera señal de una explosión de rayos gamma registrada el 2 de julio de 1967 por un instrumento a bordo de un satélite Vela 4.
El descubrimiento de estallidos de rayos gamma
Las explosiones de rayos gamma son los fenómenos astronómicos más violentos de nuestro Universo. Se caracterizan por una emisión de rayos gamma que suele durar desde unos pocos milisegundos hasta unos minutos. La radiación gamma solo es observable directamente desde el espacio, por lo que la observación de estallidos de rayos gamma está condicionada por el desarrollo de detectores gamma a bordo de satélites artificiales. Los satélites Vela equipados con ellos para detectar pruebas nucleares son los primeros en descubrir estallidos de rayos gamma accidentalmente enjulio 1967. La primera versión de los satélites, Vela 1, tiene instrumentación de baja sensibilidad. Además, los detectores de cada satélite pueden reaccionar ante partículas cargadas de fuentes ya conocidas (rayos cósmicos emitidos por el Sol, radiación emitida por una supernova, etc.). Pero enjulio 1967, una señal que dura unos segundos con un pico doble atípico es percibida simultáneamente por los detectores de dos satélites Vela 4. Los ingenieros del Laboratorio Nacional de Los Alamos liderados por Ray Klebesadel, quienes analizan los datos proporcionados por los satélites Vela, están buscando una explicación, pero no hay ninguna tormenta solar o supernova en esta fecha. El equipo del laboratorio es consciente de que se trata de un fenómeno asombroso, pero en la medida en que los detectores no proporcionan la ubicación de la fuente o la distancia a la misma, posponen un análisis más profundo para la provisión de detectores más sensibles a bordo de las generaciones posteriores de satélites Vela. Estos fueron lanzados entre 1969 (Vela 5) y 1970 (Vela 6). Al analizar el momento preciso de detección de los estallidos de rayos gamma por los distintos satélites, los ingenieros logran por triangulación localizar el origen de dieciséis de estos fenómenos en el cielo, lo que les permite eliminar las fuentes de radiación conocidas en ese momento. (Supernova, Tierra, Luna, Sol). Los datos, que estaban cubiertos por el secreto militar debido a la naturaleza del programa Vela, fueron desclasificados en 1973 y el descubrimiento de las misteriosas señales se hizo público en un artículo escrito por el equipo de Los Alamos y publicado en el Astrophysical Journal. El nuevo fenómeno se llama “explosión de rayos gamma” o GRB (“Gamma Ray Burst”).
Los datos recogidos por los satélites Vela 5A, B, 6A y 6B permitieron identificar 73 estallidos de rayos gamma entre Julio de 1969 y Abril de 1979. Los satélites Vela 6A y B también se utilizaron para buscar correlaciones entre las explosiones de rayos gamma y las emisiones de rayos X. En dos casos (GB720514 y GB740723), se detectaron datos que parecían indicar un vínculo.
Detección de prueba nuclear
El incidente de Vela
La 22 de septiembre de 1979, un instrumento (el bhangmeter) de uno de los satélites Vela detecta un doble destello de luz (un destello corto seguido de un destello largo) considerado característico de una explosión nuclear. En el pasado, esta firma de luz detectada por un satélite Vela podría haberse asociado cada vez (en 41 casos) con una explosión nuclear real. La señal luminosa del 22 de septiembre ocurre en un área de 5.000 km de diámetro que incluye el extremo sur de África, el Océano Índico y el Atlántico Sur, así como una pequeña parte de la Antártida.
Varios hechos recientes sugieren que Sudáfrica, Israel o los dos países juntos, pueden haber querido realizar una prueba nuclear a pesar de la presión ejercida por las dos superpotencias de la época. Sin embargo, existen algunas inconsistencias entre los datos proporcionados por los dos bhangmetros redundantes instalados a bordo del satélite Vela. Dados los riesgos políticos, el gobierno de los Estados Unidos está lanzando una investigación exhaustiva para determinar si realmente se realizó una prueba y quién la realizó. Participaron numerosos organismos públicos, laboratorios y empresas externas. Se analizan los datos proporcionados por los satélites Defense Support Program (DSP), Satellite Data System (SDS) y Defense Meteorological Satellite Program (DMSP), todos los portadores de detectores capaces de identificar una explosión nuclear, así como las señales de las cadenas de boyas Sistema de vigilancia acústica de sonido (SOSUS) y Sistema de localización de impacto de misiles (MILS) responsables de monitorear los submarinos de misiles soviéticos y localizar el área de precipitación de ojivas nucleares. Las muestras de la atmósfera y la vegetación en varios países de la región son realizadas por agentes estadounidenses para buscar rastros de lluvia radiactiva. Aunque algunos laboratorios concluyen que efectivamente hubo una explosión nuclear (por ejemplo, el Laboratorio de Investigaciones Navales de la Armada de los Estados Unidos), la conclusión es que las señales detectadas probablemente fueron producto de la colisión de un micrometeorito con un satélite.
Atlas Miller
Atlas Miller
Autor
Lopo Homem
¿Pedro Reinel?
¿Jorge Reinel?
¿Antonio de Holanda?
Fecha: hacia 1519
Idioma: Latín con mayoría de topónimos en portugués
Propietario: República Francesa
El Atlas Miller es un conjunto de mapas manuscritos finamente iluminados realizados en Portugal hacia 1519 y conservados actualmente en la Biblioteca Nacional de Francia. Una inscripción en el reverso de uno de los mapas dice que fue hecho por orden del rey Manuel I de Portugal por el cosmógrafo Lopo Homem, si bien se cree que también intervinieron en la realización del atlas los cartógrafos Pedro Reinel y su hijo Jorge Reinel, y el iluminador Antonio de Holanda.1
El atlas combina elementos geográficos y visuales de tres orígenes muy diferentes: las cartas portulanas, los mapas ptolemaicos y las miniaturas iluminadas de Flandes.2 Su decoración presenta una calidad artística superior a la de cualquier otra obra cartográfica portuguesa del siglo XVI. Solo puede comparársele el Atlas Vallard, hecho en Francia en 1547 con influencias portuguesas.3
Dos páginas casi en blanco, que contienen solo una red de líneas de rumbo en la mitad izquierda, la existencia de recuadros para texto dejados vacíos, y otros indicios muestran que el Atlas Miller no llegó a ser terminado.4 Se desconoce su destinatario exacto así como el modo en que llegó a la corte francesa. Su contenido y las circunstancias de su realización plantean diversos interrogantes que en algunos casos siguen siendo preguntas abiertas sobre la cartografía, los descubrimientos geográficos y las relaciones internacionales de la primera parte del siglo XVI.5
Descripción física
El Atlas Miller, tal como actualmente se conserva, está formado por seis hojas de pergamino fino (“velino“). Cuatro de ellas —de unos 41,5 cm de alto por 59 cm de ancho— muestran mapas de diversas regiones del mundo, en algunos casos por ambos lados. Otra, del mismo tamaño, muestra por un lado un mapamundi circular y por el otro una cartela con una leyenda en latín y un escudo de armas. La sexta hoja, de mayor tamaño —unos 61 cm de alto por 118 cm de ancho—, contiene un mapa en cada lado, uno del Atlántico Norte y el otro, del Mediterráneo y regiones vecinas.6
Todos los mapas, textos e ilustraciones del atlas se dibujaron a mano. Las leyendas principales están escritas en latín y la mayoría de los topónimos en portugués.
Historia
Las cinco hojas del atlas que contienen mapas regionales se las vendió en 1855 un librero de París llamado Charavey al portugués vizconde de Santarem, que se lo revendió posteriormente a Emmanuel Miller, de ahí el nombre con el que se conoce hoy al atlas. En 1897 la viuda del señor Miller se lo vendió a su vez a la Bibliothèque Nationale (BNF), donde se conserva actualmente.7
El mapamundi circular apareció por separado mucho más tarde, en 1930, cuando fue subastado en Londres.8 El comprador, Marcel Destombes, organizó en 1939 una reunión de expertos que concluyó que este mapamundi debía haber formado parte del Atlas Miller.9 Posteriormente, en 1976, Destombes donó el mapa a la BNF.10
Autor y fecha
La hoja que contiene el mapamundi circular muestra en el otro lado, en lo que debió ser originalmente la portada del atlas encuadernado, una leyenda en latín que dice que el mapamundi fue realizado por el cosmógrafo Lopo Homem en Lisboa en 1519 por orden del rey Manuel I de Portugal:
Hec est universi orbis ad hanc usqz diem cogniti / tabula quam ego Lupus homo Cosmographus / in clarissima Ulisipone civitate Anno domini nostri / Millessimo quigentessimo decimo nono jussu / Emanuelis incliti lusitanie Regis collatis pluribs / aliis tam vetustorum qz recentiorum tabulis mag / na industria et dilligenti labore depinxi.11
Traducción:
Este es el mapa de todo el orbe del universo hasta hoy conocido, el cual yo Lupus Homo, cosmógrafo, dibujé con gran industria y diligente trabajo en la ilustre ciudad de Lisboa el año de nuestro señor de mil quinientos diecinueve, por orden de Manuel, ínclito rey de Portugal, habiendo comparado muchos otros mapas tanto antiguos como modernos.
Es probable sin embargo que la realización del atlas se prolongase durante varios años, quizás hasta 1522, y que otros autores además de Homem interviniesen en él.12 Antes del descubrimiento del mapamundi circular se pensaba que el atlas era obra de los cartógrafos portugueses Pedro Reinel y Jorge Reinel, padre e hijo respectivamente. Esta atribución se ha mantenido en la historiografía portuguesa,13 si bien en el registro bibliográfico de la BNF figura Lopo Homem como único autor.7 Por otra parte, las abundantes miniaturas que decoran el atlas debieron ser realizadas por algún iluminador profesional, dada su gran calidad. El historiador Alfredo Marques identificó a Antonio de Holanda como posible autor, llegando a sugerir que este artista pudo haber sido además el coordinador general del proyecto.1
Destinatario
El atlas fue realizado por orden del rey Manuel I pero no se sabe con certeza a quién estaba destinado ni por qué camino llegó a París. El escudo de armas que figura actualmente en la portada es el de Catalina de Médici, reina de Francia, y debió ser añadido después de 1559 porque incluye un distintivo que indica que la reina estaba viuda por aquel entonces.14 Armando Cortesão sugirió que el rey Manuel podría haberle enviado el atlas como regalo al rey de Francia Francisco I; Leon Bourdon afirmó que podrían haber sido los hijos de Lopo Homem los que lo llevasen consigo al emigrar a Francia en los años 1540; y Alfredo Marques propuso la hipótesis de que fuese un regalo de boda de Manuel I para su nueva esposa, Leonor, hermana del rey Carlos I de España, la cual al morir Manuel en 1523 se lo llevó consigo a España y de allí en 1530 a Francia al ser casada de nuevo con el rey Francisco I.15
Contenido

Mapamundi circular
Mapamundi o hemisferio circular del Atlas Miller.
El primer mapa del atlas es un mapamundi circular de 33 cm de diámetro,16 sin indicación de meridianos, paralelos ni ninguna otra línea cartográfica, lo cual impide saber si representa solo un hemisferio o una parte más amplia de la superficie terrestre. El eje vertical del mapa pasa por Rusia, Palestina y el este de África mientras que el eje horizontal cruza el actual Brasil, la isla de Madagascar y la península de Malaca. Si se asume que el eje horizontal coincide con el ecuador entonces el continente africano parece encontrarse desplazado al norte de su posición real.17
El borde meridional del planisferio muestra una fantástica tierra austral que une Sudamérica con el Extremo Oriente y por tanto hace supuestamente imposible cualquier navegación desde el océano Atlántico hacia Asia bordeando América por el sur.18 Esa era la ruta que iba a seguir la expedición castellana capitaneada por el portugués Fernando de Magallanes que precisamente en 1519, fecha de realización de este mapa, partió de Sanlúcar de Barrameda.
Dicha tierra austral parece convertir a la extensión marina formada por los océanos Atlántico e Índico en un mar interior. Esta concepción geográfica tiene un precedente en la obra Esmeraldo de situ orbis, del también portugués Duarte Pacheco Pereira, escrita hacia 1505-1508 e influenciada por las teorías de autores clásicos como Ptolomeo o Pomponio Mela y por ciertos pasajes bíblicos.19 También aparece mencionada en un párrafo de texto del mapa de Piri Reis.20
Mapas regionales
Isla de Madagascar en el mapa de África meridional.
El Atlas Miller incluye siete mapas regionales; le falta una hoja que debió contener un octavo, probablemente del continente africano. Los siete mapas son bastante homogéneos en su tamaño, estilo decorativo y convenciones cartográficas. Todos presentan la típica red de líneas de rumbos de las cartas portulanas medievales, con el habitual tronco de leguas. Además cada uno incluye un meridiano graduado en latitudes, el ecuador y los trópicos en sus latitudes correspondientes y, a la manera de la Geographia de Claudio Ptolomeo, los paralelos que delimitan los climata ptolemaicos.21 Todos están orientados con el norte hacia arriba.
El primer mapa regional, en la encuadernación original del Atlas, es el de las costas de Europa septentrional (páginas 6 y 7), que abarca desde Bretaña por el sur hasta el “mare congelatu” de Islandia por el norte. La toponimia es abundante en Francia, Flandes y las islas Británicas pero casi inexistente en el Báltico y Escandinavia.22 la página siguiente muestra la mitad occidental de un mapa del Atlántico con una exacta representación de las islas Azores (“insule Ancipitrum”) y de una isla Verde (“insula Viridis”) que podría ser Groenlandia.23 La mitad oriental de este mapa probablemente mostrase la península ibérica pero esa parte del atlas se ha perdido.
África apenas aparece representada en las cartas regionales del Atlas Miller porque falta la hoja que probablemente contenía en un lado un mapa del continente entero (páginas 10 y 11 en la encuadernación original) y en el otro una imagen más detallada del África meridional, la cual continuaba por occidente el fragmento de mapa que hoy muestra Madagascar (páginas 12 y 13). Esta isla se representa con el nombre de “insule divi laurentii” y con muchos topónimos, indicando una leyenda que sus habitantes son musulmanes.24
El mapa del océano Índico (páginas 14 y 15 del atlas) muestra en su mitad occidental unos trazados costeros muy exactos, con latitudes en general muy correctas. La mitad oriental es más errónea, si bien muestra el litoral de Birmania y el delta del río Ganges en su posición correcta. En el mapa de Insulindia (páginas 16 y 17) se pueden ver las ciudades de Malaca, conquistada por los portugueses en 1511, y Singapur, así como las islas Molucas (llamadas “Malucus Insule”). Una leyenda en latín dice que más allá de Sumatra (“Trapobana”) existe un total de 1378 islas.25
El mapa del “Magnus Golfus Chinarum” (páginas 18 y 19) muestra un trazado geográfico totalmente erróneo. No da el nombre de ninguna localidad costera, limitando la toponimia a las grandes regiones. Este mapa presenta la peculiaridad de que dos de los barcos dibujados como decoración no muestran insignias de Portugal ni de países musulmanes, como en el resto del atlas, por lo que podrían representar juncos de Java.2627
El mapa de la “Terra Brasilis” o “Regionis magni brasilis” (páginas 22 y 23) muestra el continente sudamericano desde la costa norte del actual Brasil hasta más allá del estuario del Río de la Plata por el sur. Tiene una gran cantidad de topónimos, muchos más que cualquier otro mapa del Brasil de décadas anteriores o posteriores. En el extremo noroccidental, en una región desprovista de toponimia, aparece la desembocadura de uno o dos grandes ríos que Marques identifica con el Amazonas.28 Curiosamente, la persona que decoró este mapa cometió un error al rotular el trópico de Capricornio, al cual llamó “Circulus Cancri”.29
Gran desplegable
El Atlas Miller incluye un desplegable de dimensiones sensiblemente mayores que el resto de la obra (61 x 118 cm). Por uno de sus lados presenta un mapa del mar Mediterráneo y regiones adyacentes; por el otro un mapa del Atlántico norte, que incluye los recientes descubrimientos en el continente americano.
El mapa del Mediterráneo abarca el espacio tradicional de las cartas portulanas mediterráneas, ligeramente expandido para incluir el mar Caspio (“Hyrcanius mare”) y el golfo Pérsico. Tiene una red de líneas de rumbos que se distribuyen en dos círculos de rosas de vientos, no en solo uno como es el caso de los mapas regionales del Atlas. Contrariamente a estos no muestra tronco de leguas pero sí un meridiano graduado en latitud y, algo poco frecuente, varios paralelos con graduaciones incompletas en longitud.3031
El mapa del Atlántico Norte abarca desde las costas occidentales de Europa y África hasta las islas y tierras continentales de América (llamada “Mundus Novus”). Difiere de los demás mapas del atlas en que no presenta líneas de rumbos sino una simple cuadrícula ortogonal. Cortesão interpretó este hecho como una muestra más de que el Atlas Miller no llegó a ser terminado mientras que Marques ha especulado que podría haberse tratado de una omisión deliberada para dificultar el uso de este mapa para la navegación.32 Sí que incluye un tronco de leguas, un meridiano graduado en latitud y los límites de los climata ptolemaicos. Los topónimos son abundantes en la región del Caribe y en el norte del continente, no existiendo ninguno en las costas africanas.32 Existen tres cartelas con leyendas en latín y una cuarta, vacía, que no llegó a ser utilizada.32 La situada más al norte describe la “Terra Corte Regalis”, alusión a las tierras exploradas por Gaspar Corte Real; otra dice que las costas de los actuales Estados Unidos forman un continente continuo con Noruega por el norte y con Brasil por el sur, y la tercera afirma que en las Antillas del rey de Castilla se encuentra oro.33 Una ilustración representa en Norteamérica una escena bucólica en torno a un manantial, posible alusión a la fuente de la eterna juventud que Juan Ponce de León buscó por esos parajes (“Terra Bimene”). Otra miniatura muestra en Centroamérica tres personas de piel negra que parecen discutir dónde comenzar una excavación mientras una cuarta dispara una flecha con un arco. Estas figuras podrían ser “indios de piel oscura” 31 o quizás algunos de los primeros esclavos africanos transportados a América.33

El Atlas Miller quiso evitar la primera circunnavegación de la Tierra
Por Gonzalo Prieto
Hace 500 años, el 20 de septiembre de 1519, cinco naves partieron de Sanlúcar de Barrameda con el objetivo de circunnavegar el planeta. La expedición estaba capitaneada por Fernando de Magallanes, que fallecería en la misma, y Juan Sebastián Elcano que la lideraría en su vuelta.
Regresaron a la Península Ibérica 18 de los 239 hombres que salieron. Fueron los primeros en dar una vuelta al mundo tras recorrer con éxito el paso que sería dado en llamar Estrecho de Magallanes, al sur del continente americano. Habían hecho realidad una de las mayores gestas marítima de la historia que supuso un antes y un después en la concepción de las dimensiones de la Tierra y de la configuración de sus continentes.
El atlas Miller: una obra de arte

El atlas combina elementos geográficos y visuales de tres orígenes muy diferentes: las cartas portulanas, los mapas ptolemaicos y las miniaturas iluminadas de Flandes. Lo cierto es que su decoración presenta una calidad artística superior a la de cualquier otra obra cartográfica portuguesa del siglo XVI. Solo puede compararse con el Atlas Vallard, hecho en Francia en 1547 con influencias portuguesas.
Europa en el Atlas Miller. 1519. Biblioteca Nacional de Francia.
Pérez-Mallaína, que es autor de la conferencia «1519-1522: la nueva imagen del mundo. El Atlas Miller y la primera circunnavegación de la Tierra», considera que «el Atlas Miller es una magnifica obra de arte, con ilustraciones que pueden encuadrarse dentro de la escuela flamenca».

Brasil en el Atlas Miller. 1519. Biblioteca Nacional de Francia.
Pero lo cierto es que el contenido de este atlas y las circunstancias de su realización plantean diversos interrogantes. En algunos casos siguen siendo preguntas abiertas sobre la cartografía, los descubrimientos geográficos y las relaciones internacionales de la primera parte del siglo XVI.
Una herramienta de disuasión cartográfica
Pérez-Mallaína explica que «según la opinión de algún eminente investigador portugués, con él se intentaba demostrar que para llegar a las Molucas (archipiélago de la actual Indonesia) la única ruta viable era la portuguesa (rodeando África por el cabo de Buena Esperanza)».

Mapamundi o hemisferio circular del Atlas Miller, de 33 cm de diámetro. 1519. Biblioteca Nacional de Francia.
Así, explica, que según esta interpretación «el océano Atlántico y el Índico estaban rodeados de tierras (siguiendo la visión de Ptolomeo) y formaban un gigan tesco mediterráneo oceánico, que no tenía comunicación con el Pacífico». En ese sentido se podría ver, según Pérez-Mallaína «como una forma de disuasión cartográfica, que difundida desde Portugal, pretendía quitar respaldo geográfico al proyecto de Magallanes».
tesco mediterráneo oceánico, que no tenía comunicación con el Pacífico». En ese sentido se podría ver, según Pérez-Mallaína «como una forma de disuasión cartográfica, que difundida desde Portugal, pretendía quitar respaldo geográfico al proyecto de Magallanes».
Detalle de Malaca o las conocidas por entonces como «Islas de las Especias» en el Atlas Miller. 1519. Biblioteca Nacional de Francia.
Por ello, a juicio de este investigador «los trabajos de Ortelius o Mercator sí suponen una verdadera revolución cartográfica y poseen mayor entidad que el Atlas Miller». De todas maneras, según reconoce, «el Miller gana en belleza a casi todos».
La fecha del planisferio o mapamundi resumen del Atlas es 1519, por lo que coincide con la fecha de salida de Magallanes. El Atlas supone la imagen actualizada de la visión del mundo grecolatino, concretamente de la de Claudio Ptolomeo, vigente desde el siglo II d.C.
La primera circunnavegación a la Tierra
La primera circunnavegación de la Tierra, al servicio de Carlos I, cumple su quinto centenario y tenía el propósito de abrir una ruta comercial con las islas Molucas o de las Especias (un archipiélago de la actual Indonesia) por occidente, buscando un paso entre el océano Atlántico y el océano Pacífico.
La escuadra, después de haber explorado durante meses el litoral americano al sur de Brasil logró cruzar el estrecho de Magallanes el 21 de noviembre de 1520. En su travesía por el Pacífico llegó a las islas Filipinas, donde, el 27 de abril de 1521, muere Fernando de Magallanes en la batalla de Mactán.
explorado durante meses el litoral americano al sur de Brasil logró cruzar el estrecho de Magallanes el 21 de noviembre de 1520. En su travesía por el Pacífico llegó a las islas Filipinas, donde, el 27 de abril de 1521, muere Fernando de Magallanes en la batalla de Mactán.
Mapa del primer viaje de circunnavegación mundial (10 de agosto de 1519 – 8 de septiembre de 1522). Fuente: Wikipedia.

Los expedicionarios continuaron la navegación hasta las islas Molucas, objetivo de su viaje, donde eligieron a Juan Sebastián Elcano para capitanear el viaje de regreso. Navegando hacia el oeste por el océano Índico y dando la vuelta a África, el 6 de septiembre de 1522 la Victoria, única nave que quedaba en la expedición, retornó a Sanlúcar de Barrameda con su carga de especias, convirtiéndose en la primera embarcación de la historia en dar la vuelta al mundo.
Mapa de las Indias Orientales del Atlas Miller. Pedro Reinel ; Jorge Reinel; Antonio de Holanda
1519. Fuente: Biblioteca Nacional de Francia.
Globos de Johannes Schöner
Globos de Johannes Schöner
Grabado del globo de Schöner de 1515 (Luculentissima quaedam terrae totius descriptio)
Los Globos de Johannes Schöner son una serie de mapas esféricos de la Tierra realizados por Johannes Schöner (1477-1547). El primero data de 1515, estando entre los más antiguos que aún se conservan.1 Algunos autores afirman que muestran partes del mundo que todavía no eran conocidas por los europeos, como el estrecho de Magallanes y la Antártida.2
Globos
El Globo de Johannes Schöner de 1515 era un mapa impreso fijado sobre una esfera.3 Se han conservado dos ejemplares originales, uno en el Museo de Historia de Fráncfort y el otro en la Biblioteca Herzogin Anna Amalia, en Weimar. Hay pocas dudas acerca de que Schöner conocía el globo construido en Núremberg por Martin Behaim en 1492.4 En la cartografía de Schöner puede observarse un estrecho entre el extremo sur de América y la tierra situada más al sur antes de su “descubrimiento oficial” por Fernando de Magallanes en 1520. El estrecho en realidad se halla en los 53 grados sur, aunque en el globo de 1515 aparece en los 40 grados sur. Schöner acompañó su globo con un tratado explicativo, Luculentissima quaedam terrae totius descriptio (“Una muy  Lúcida Descripción de Todas las Tierras”).5
Lúcida Descripción de Todas las Tierras”).5
Globo de Johannes Schöner, 1520, hemisferio occidental. Friedrich Wilhlem Ghillany, Geschichte des Seefahrers Ritter Martin Behaim, Nürnberg, Bauer und Raspe, J. Merz, 1853.
El Globo de Johannes Schöner de 1520 es un ejemplar manuscrito. Muestra el continente antártico, que no había sido explorado en aquella fecha.6 En los globos de 1515 y 1520, AMERICA es mostrada como una isla, tal como se explica en el Luculentissima:
América, la cuarta parte del mundo, y las otras islas que le pertenecen. De este modo puede saberse que la Tierra está dividida en cuatro partes y que las primeras tres partes son continentes, esto es, tierra firme, pero que la cuarta es una isla, como se observa por estar rodeada en todas partes por los mares”.7
Esto ya se indica en la Cosmographiae Introductio de Martin Waldseemüller, donde se dice:
Hasta la fecha [la tierra entera] ha sido dividida en tres partes, Europa, África, y Asia… Ahora, estas partes de la tierra han sido más extensamente exploradas y una cuarta parte ha sido descubierta por Amerigo Vespucci… Por ello la tierra conocida pasa ahora a estar dividida en cuatro partes. Las primeras tres partes son continentes, mientras que la cuarta es una isla, tanto más cuando se ha encontrado que está rodeada de mares por todos lados.8
El Globo de Johannes Schöner de 1523, un modelo imprimido, se había considerado perdido hasta que fue identificado por George Nunn en 1927.9
Globo de Johannes Schöner de Weimar de 1533, en el que América del Norte aparece formando parte de Asia. También muestra la Antártida
El Globo de Johannes Schöner de Weimar de 1533 muestra América del Norte como parte de Asia, así como la Antártida. Escribió un tratado, el Opusculum Geographicum, para acompañar a este globo,10 en el que describía la aproximación cosmográfica que había utilizado para construir su globo: “Tuve que manejar cartas marinas dibujadas con caracteres excelentes, y noticias de gran valor, que intenté hacer concordar cuanto fuese posible, con posiciones astronómicas”. (Opusc. Geogr., Pt.I, cap.ix).11
En los globos de Schöner de 1523 y 1533, AMERICA se muestra como parte de Asia, como explica en el Opusculum Geographicum:
Después de Ptolomeo, muchas regiones más allá de 180 grados al este fueron descubiertas por el veneciano Marco Polo y otros, pero ahora, habiendo sido descubiertas por los genoveses Colón y Americo Vespucci, que alcanzaron solo las partes costeras de aquellas tierras de España a través del Océano Occidental, consideraron que se trataba de una isla a la que llamaron América, la parte cuarta del globo. Pero por los viajes más recientes realizados en el año 1519 después de Cristo por Magallanes, liderando los barcos del Divino e Invencible [emperador] Carlos etc. a las Islas Molucas, que otros llaman Maluquas, situadas en el Lejano Oriente, han encontrado que la tierra que sería el continente Superior a la India, es una parte de Asia.12
El Globo de Schöner de 1515 tiene una deuda obvia con el mapa de Waldseemüller de 1507, que a su vez derivó del globo construido en Núremberg en 1492 por Martin Behaim. El globo de 1515 coincide con sus precedentes en representar la India Superior (Asia oriental, llamada India superior sive orientalis en el Luculentissima) extendiéndose hasta alcanzar alrededor de la longitud 270° este. Hacia el oeste de España, los descubrimientos de Colón, Vespucci y de otros exploradores españoles y portugueses están representados como una franja larga y estrecha de tierras que se extienden aproximadamente desde la latitud 50° norte hasta los 40° sur. Las costas occidentales de estas tierras, America en el sur y Parias en el norte, está rotulada como Terra ultra incognita (“Tierra allende desconocida”) y Vlterius incognita terra (“Tierra más allá allende desconocida”), indicando que las extensiones de tierra hacia el oeste eran desconocidas. El mar al oeste de estas tierras está rotulada como Oceanus orientalis indianus (océano Índico Oriental), de acuerdo con la conclusión establecida por Colón después de su tercer viaje de 1496-1498, cuando encontró el suelo continental sudamericano, al que llamó el Nuevo Mundo, que identificó con “la isla más grande del mundo” descrita por Marco Polo, Java Major, situada al suroeste de la provincia de la India Superior llamada Ciamba (Champa). Reflejando este concepto, Schöner explicó en otro de sus escritos, el Opusculum Geographicum (cap.xx): “Los Genoveses Colón y Américo Vespuccio, alcanzando solo las partes costeras de aquellas tierras de España a través del Océano Occidental, consideraron que serían una isla a la que llamaron América”. O como Nicolás Copérnico escribió en De Revolutionibus (lib.I, cap.iii):
Ptolomeo extendió el área habitable hasta la mitad alrededor del mundo, dejando más allá la tierra desconocida, donde modernamente se ha añadido Cathay y regiones muy extensas más allá de los 60 grados de longitud, de modo que ahora una longitud más grande de tierra deshabitada que la que queda para el Océano. Además, a esto tendrían que ser añadidas las grandes islas descubiertas en nuestro tiempo bajo los Príncipes de España y Portugal, especialmente América, nombrada en memoria del capitán del barco que la descubrió y considerada debido a su tamaño todavía desconocido como otro mundo, además de muchas otras islas hasta ahora desconocidas, que no nos asombra considerar que sean las Antípodas o Antichthones.
Donde Schöner difiere más notablemente de Waldseemüller es en la representación en su globo de un continente antártico, llamado por él Brasilie Regio. Su continente está basado, aunque tenuemente, en el informe de un viaje real: el de los mercaderes portugueses Nuno Manuel y Cristóvão de Haro al río de la Plata, descrito en el Newe Zeytung auss Presillg Landt (“Nuevas Noticias de la Tierra de Brasil”) publicado en Augsburgo en 1514. El Zeytung relata el paso de los navegantes portugueses a través de un estrecho entre el punto más al sur de América, o Brasil, y una tierra al suroeste, denominada como vndtere Presill o Brasilia inferior. Este supuesto “estrecho” era de hecho el río de la Plata (y/o finalmente el golfo de San Matias). Con “vndtere Presill”, el Zeytung daba a entender que parte de Brasil alcanzaba latitudes más bajas, pero Schöner confundió el significado de “tierra en el lado del sur del estrecho”, con latitudes más altas, así que le dio el significado opuesto. En este débil fundamento basó la construcción de su continente circumantártico, del que no se explican los motivos de su configuración anular o en forma de anillo. En el Luculentissima explica:
El portugués, así, navegó alrededor de esta región, el Brasilie Regio, y descubrió un pasillo muy similar a aquellos de nuestra Europa (donde residimos) y situado lateralmente entre el este y el oeste. De un lado al otro la tierra es visible; y el cabo de esta región sobresale aproximadamente 60 millas, tal como si uno navegase hacia el este a través del estrecho de Gibraltar o Sevilla y Berbería o Marruecos en África, como nuestro Globo muestra hacia el polo antártico. Más allá, la distancia es solo moderada de esta Región de Brasil hasta Malaca, donde Santo Tomás fue coronado con el martirio.13
Con esta vaga información, unida al concepto de las Antípodas heredado de la antigüedad grecorromana, Schöner construyó su representación del continente del sur. Su estrecho sirvió de inspiración a la expedición de Fernando de Magallanes para alcanz ar las Molucas por una ruta hacia el oeste. Tomó el descubrimiento de Magallanes de Tierra de Fuego en 1520 como una confirmación más firme de su existencia, y en sus globos de 1523 y 1533 lo describió como TERRA AVSTRALIS RECENTER INVENTA SED NONDUM PLENE COGNITA (“Terra Australis, recientemente descubierta pero todavía no plenamente conocida”). Este hecho fue asumido por sus seguidores, el cosmógrafo francés Oronce Fine en su mapa mundi de 1531, y los flamencos Gerard Mercator en 1538 y Abraham Ortelius en 1570. Los conceptos de Schöner influyeron en los mapas de la escuela cartográfica de Dieppe, notablemente en su representación de Jave la Grande. Generaciones subsiguientes de cartógrafos y de geógrafos teóricos continuaron elaborando mapas con la imagen de una vasta y rica Terra Australis para tentar la codicia de mercaderes y estadistas.
ar las Molucas por una ruta hacia el oeste. Tomó el descubrimiento de Magallanes de Tierra de Fuego en 1520 como una confirmación más firme de su existencia, y en sus globos de 1523 y 1533 lo describió como TERRA AVSTRALIS RECENTER INVENTA SED NONDUM PLENE COGNITA (“Terra Australis, recientemente descubierta pero todavía no plenamente conocida”). Este hecho fue asumido por sus seguidores, el cosmógrafo francés Oronce Fine en su mapa mundi de 1531, y los flamencos Gerard Mercator en 1538 y Abraham Ortelius en 1570. Los conceptos de Schöner influyeron en los mapas de la escuela cartográfica de Dieppe, notablemente en su representación de Jave la Grande. Generaciones subsiguientes de cartógrafos y de geógrafos teóricos continuaron elaborando mapas con la imagen de una vasta y rica Terra Australis para tentar la codicia de mercaderes y estadistas.
Reproducción del globo terráqueo obra del matemático, cartógrafo y constructor de globos alemán.
Johannes Schöner. De este globo impreso en husos o «gajos» se conservan dos ejemplares montados sobre una esfera y uno impreso en papel sin montar e incompleto. La gran singularidad de este globo es que muestra en 1515 un paso bajo el extremo austral de Suramérica que comunica el Atlántico con el Pacífico, algo aún no descubierto oficialmente hasta cinco años después, en 1520, por la expedición de Magallanes y Elcano, y cuyas noticias no llegaron a España hasta 1522.
Schöner obtuvo la información sobre la existencia de ese estrecho de un relato impreso en 1514 que narraba un viaje portugués hasta los 40 grados de latitud Sur y que posiblemente se refería al estuario del Río de la Plata o al golfo de San Matías, situado en esos 40 grados
Mapamundi de Leonardo
Mapamundi de Leonardo
Recreación del llamado mapamundi de Leonardo da Vinci.
El llamado Mappamundi de Leonardo da Vinci es un mapa “tipo octante” fechado aproximadamente en 1514 que se ha pretendido relacionar con el descubrimiento de América o, cuando menos, con los primeros usos del nombre. Henry Harrise en su obra de 1892 alude a la imposibilidad de que el mapa, en realidad: “sections of a rude and elementary globe” recogidos entre los papeles de Leonardo da Vinci conservados en Londres, hubiese sido dibujado por el propio Leonardo, siendo citado por Eugène Müntz1 diciendo acerca de la opinión de R. H. Major sobre la autoría de Leonardo:“an opinion NOW entirely abandoned2 > -NOW = en esa actualidad del año 1898-“,3ya que a partir de Nordenskjold, con él, en el siglo XX, media docena de autores han dicho lo contrario, y en el siglo XXI, en 2014, la autoría de la proyección octante por parte de Leonardo habría quedado demostrada por Christopher Tyler,4 De hecho, hay un boceto de la misma en una página de los manuscritos del Codex Atlanticus, hecho de la mano de Leonardo, siendo el boceto de Leonardo, la primera descripción conocida de la proyección octante.
El mapa fue publicado en 1865 por R. H. Major que defendió la autoría de Leonardo da Vinci, destacando la temprana utilización del nombre de América, propuesto por Hylacomilus en 1507,5cuyo mapa, no fue descubierto hasta 1901, por lo tanto la aseveración de Major era cierta en 1865.6
Descripción
La esfera del mundo está dividida en ocho triángulos esféricos equiláteros, cada sección delimitada por la línea ecuatorial y dos meridianos con 90% de diferencia. Este fue el primer mapa de este tipo. Algunos críticos creen que el mapa no fue realmente obra del mismo Leonardo, ya que la precisión y la maestría en el dibujo no reflejan los altos estándares usuales de da Vinci. Fue hecho probablemente por algún empleado de confianza o copista del taller de Leonardo.’6
Lo documentó R.H. Major en su comunicado Memoir on a mappemonde by Leonardo da Vinci, being the earliest map hitherto known containing the name of America7
Historia sobre la autoría
Esbozo de Leonardo de la proyección octante en el Codex Atlanticus (1508)
Aunque la autoría de la primera descripción de la proyección Da Vinci octant por parte de Leonardo habría quedado demostrada en el informe de Christofer Tyler,,8 que decidió tratar por separado la autoría de la proyección octante (1508) y la autoría del mapa de Leonardo (1514), los otros autores anteriores a él tratan conjuntamente la autoría de ambos (autoría del mapa y autoría de la proyección -sin separar el uno de la otra-), hablan de “..the eigth of a supposed globe represented in a plane..” o sobre “globe sections” (Harrisse) y otros les llaman “gores”, que constituyen, de hecho, una proyección del globo (hay un error en la traducción de 2005 de Muntz al castellano, videt: “…fragmentos de una pequeña esfera tosca y elemental..” en lugar de “sections of a rude, elementary globe” -sections implica proyección… fragmentos no, aparte que lo hace incompleto-).
Entre estos estudiosos, la autoría de Leonardo no está universalmente aceptada, con algunos autores completamente en contra de cualquier mínima contribución de Leonardo, como, Henry Harrisse (1892),9 o Eugène Müntz (1898 – citando la autoridad de Harrisse de 1892),10
Otros eruditos aceptan explícitamente ambos (tanto del mapa como de la proyección), totalmente como un trabajo Leonardo, describiéndolos como los primeros de este tipo, entre ellos, R.H. Major (1865) en su trabajo, Memoir on a mappemonde by Leonardo da Vinci, being the earliest map hitherto known containing the name of America (“..the eigth of a supposed globe represented in a plane..” ),11 Grothe,12 la “Enciclopedia universal ilustrada europeo-americana”(1934),13 Snyder en su libro “Flattening the earth” (1993),14 Christoher Tyler en su trabajo Leonardo da Vinci’s World Map (2014),8 José Luis Espejo en su libro “Los mensajes ocultos de Leonardo Da Vinci” (2014),15 o David Bower en su libro “The unusual projection for one of John Dee’s maps of 1580” (2012).16
Otros también aceptan explícitamente como auténticos (tanto el mapa como la proyección), aunque dejando en el aire la mano directa de Leonardo, entregando la autoría de toda la obra a uno de sus discípulos, como Nordenskjold resume en su libro “Facsimile-Atlas” (1889), confirmado además por Dutton (1995) y muchos otros: “..on account of the remarkable projection..not by Leonardo himself, but by some ignorant clerk.”,17 o Keunig (1955) que llega a ser más preciso: “..by one of his followers at his direction..”.18
Mapa “tipo octante” de la Windsor Library


Recreación del nuevo continente americano en el mapa de Leonardo. Compárese con el mapa de Cantino (1502), que representa los viajes hasta esa fecha de Americo Vespucio.
Cuando Leonardo da Vinci dividió el mundo en ocho partes
Es ya un tópico, pero no hay cuestión que Leonardo da Vinci parezca que no hubiera tratado, aunque fuere de forma superficial. Y, en efecto, también le interesaban los mapas. En el Codex Atlanticus, que viene a ser una especie de compendio de papeles diversos de Leonardo dispuesto en varios volúmenes y conservado en la Biblioteca Ambrosiana de Milán, aparecen esbozos de diversos tipos de proyección cartográfica. La mayoría eran conocidos en su tiempo, pero una en particular parece ser obra de Leonardo o, al menos, introdujo  en ella ciertos elementos originales, aunque ha habido polémicas sobre ello (algunos autores afirman que ya se había contemplado el uso de este tipo de proyección anteriormente). El dicciónario de la RAE define un octante como:
en ella ciertos elementos originales, aunque ha habido polémicas sobre ello (algunos autores afirman que ya se había contemplado el uso de este tipo de proyección anteriormente). El dicciónario de la RAE define un octante como:
Instrumento astronómico del tipo del quintante y del sextante, y de análoga aplicación en barcos y aviones, cuyo sector comprende solo 45 grados o la octava parte del círculo.
Proyección en «octantes» propuesta por Leonardo da Vinci.
La proyección más curiosa de las utilizadas por Leonardo era, precisamente, la que es conocida como «proyección en octantes», con un esbozo inicial del año 1508 y un mapa más elaborado en 1514. Esta proyección dividía el mundo en ocho partes a modo de triángulos de Reuleaux1, como si un trébol de cuatro hojas se tratara para cada hemisferio. Como puede verse en la imagen que aparece a continuación, la esfera del globo terrestre está dividida en ocho triángulos esféricos equiláteros. Curiosamente, fue uno de los primeros mapas en los que se menciona a América por su nombre y, también, uno de los primeros en colocar la Antártida, aunque más como un caso de imaginaria «Terra Australis» que como algo real. El dibujo parece ser, según los expertos, obra de algún copista que hubiera trabajado bajo encargo del propio Leonardo.
de Reuleaux1, como si un trébol de cuatro hojas se tratara para cada hemisferio. Como puede verse en la imagen que aparece a continuación, la esfera del globo terrestre está dividida en ocho triángulos esféricos equiláteros. Curiosamente, fue uno de los primeros mapas en los que se menciona a América por su nombre y, también, uno de los primeros en colocar la Antártida, aunque más como un caso de imaginaria «Terra Australis» que como algo real. El dibujo parece ser, según los expertos, obra de algún copista que hubiera trabajado bajo encargo del propio Leonardo.
A principios del siglo XX el cartógrafo e ingeniero Joseph Stanislaus Cahill dio una vuelta de tuerca al concepto con su proyección tipo «mariposa», cuya evolución más refinada dio lugar a la proyección Cahill–Keyes.
La proyección «en mariposa» de Cahill en un documento de 1919.
OSO
OSO
Observatorio Solar en Órbita
El Programa del Observatorio Solar en Órbita (abreviado OSO) era el nombre de una serie de telescopios espaciales estadounidenses destinados principalmente a estudiar el Sol, aunque también incluían importantes experimentos no solares. Ocho fueron lanzados con éxito a la órbita terrestre baja por la NASA entre 1962 y 1975 utilizando cohetes Delta . Su misión principal era observar un ciclo de manchas solares de 11 años en espectros de rayos X y UV. Los siete iniciales (OSO 1–7) fueron construidos por Ball Aerospace, entonces conocida como Ball Brothers Research Corporation (BBRC), en Boulder, Colorado.[1] OSO 8 fue construido por Hughes Space and Communications Company, en Culver City, California.

OSO 4
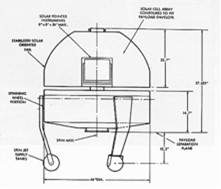
Diagrama del observatorio solar en órbita

Un cohete Delta lanzando OSO 8 el 21 de junio de 1975, en Cabo Cañaveral, Florida
Historia
El diseño básico de toda la serie presentaba una sección giratoria, la “Rueda”, para proporcionar estabilidad giroscópica. Una segunda sección, la “Vela”, fue impulsada eléctricamente contra la rotación de la Rueda y estabilizada para apuntar al Sol. El Sail llevaba instrumentos solares puntiagudos y también el conjunto de células solares fotovoltaicas que alimentaban la nave espacial. El cojinete crítico entre la rueda y la vela fue una característica importante del diseño, ya que tenía que funcionar sin problemas durante meses en el duro vacío del espacio sin la lubricación normal. También transportaba la energía de la Vela y los datos de los instrumentos solares puntiagudos a la Rueda, donde se ubicaban la mayoría de las funciones de la nave espacial. Los instrumentos científicos adicionales también podrían ubicarse en la Rueda,
OSO B sufrió un incidente durante las actividades de integración y verificación el 14 de abril de 1964. El satélite estaba dentro de la instalación de prueba de giro en Cabo Cañaveral conectado a la tercera etapa de su impulsor Delta C cuando un técnico encendió accidentalmente el impulsor a través de electricidad estática. El motor de la tercera etapa se activó, se lanzó a sí mismo y al satélite hacia el techo y rebotó en un rincón de la instalación hasta que se quemó. Tres técnicos murieron calcinados. El satélite, aunque dañado, pudo repararse utilizando una combinación de piezas prototipo, repuestos de vuelo y componentes nuevos. Fue lanzado diez meses después, el 3 de febrero de 1965, y fue designado OSO 2 en órbita.[2]
OSO C nunca llegó a la órbita. El despegue tuvo lugar el 25 de agosto de 1965 y todo salió bien durante la quema de la segunda etapa. Durante la fase de inercia previa a la separación de la tercera etapa, su motor cohete se encendió prematuramente. Esto se registró en las lecturas en tierra como una perturbación de actitud seguida de la pérdida de la telemetría de la segunda etapa, y aunque la tercera etapa logró separarse, sufrió una caída del 18% en el empuje. La nave espacial OSO no pudo alcanzar la velocidad orbital y, en cambio, volvió a caer a la atmósfera y se quemó. Se sospechó que la falla fue causada por una modificación en el mecanismo de encendido en la tercera etapa después de algunas dificultades técnicas menores experimentadas en el lanzamiento anterior de Delta C (TIROS 10 el 2 de julio).[3]
| Designacion | Fecha de lanzamiento | fecha de reingreso | Resultados notables |
| OSO 1 (OSO A) | 7 de marzo de 1962 | 7 de octubre de 1981 [4] | |
| OSO 2 (OSO B2) | 3 de febrero de 1965 | 8 de agosto de 1989 [5] | |
| OSO 3 (OSO E1) | 8 de marzo de 1967 | 4 de abril de 1982 [6] | Se observaron llamaradas solares del Sol, así como una llamarada de Scorpius X-1 [7] [8] |
| OSO 4 (OSO D) | 18 de octubre de 1967 | 14 de junio de 1982 [9] | |
| OSO 5 (OSO F) | 22 de enero de 1969 | 2 de abril de 1984 [10] | Radiación difusa de rayos X de fondo medida de 14 a 200 keV [11] [12] |
| OSO 6 (OSO G) | 9 de agosto de 1969 | 7 de marzo de 1981 [13] | Observó tres instancias de coincidencias de rayos X duros con estallidos de rayos gamma. [14] |
| OSO 7 (OSO H) | 29 de septiembre de 1971 | 8 de julio de 1974 [15] | Erupciones solares observadas en el espectro de rayos gamma. Los datos recopilados permitieron la identificación de Vela X-1 como un binario de rayos X de alta masa. [16] [17] |
| OSO 8 (OSO I) | 21 de junio de 1975 | 8 de julio de 1986 [18] | Encontró una línea de emisión de hierro en el espectro de rayos X de un cúmulo de galaxias. [19] |
El programa del Observatorio Solar en Órbita Avanzada (AOSO) se desarrolló a mediados de la década de 1960 como una versión más avanzada de la serie OSO. Concebida como un sistema de satélites en órbita polar, esta nave espacial monitorearía continuamente el Sol y el entorno circundante con detectores e imágenes electrónicas que van desde rayos X hasta luz visual. Debido a restricciones presupuestarias, el programa AOSO se canceló en 1965. En cambio, fue reemplazado por los satélites OSO-I, OSO-J y OSO-K. Solo se lanzó OSO-I, que se convirtió en OSO 8.[20]
Se desarrolló y lanzó otro satélite que utiliza la plataforma Orbiting Solar Observatory: el satélite Solwind. Fue lanzado el 24 de febrero de 1979. Fue operado por el Programa de prueba espacial del Departamento de Defensa. Fue destruido el 13 de septiembre de 1985 en una prueba de misiles ASAT.
OSO 1
Descripción general de la misión
El primero de una serie de 8 observatorios solares en órbita lanzados con éxito (OSO 1) se lanzó el 7 de marzo de 1962. La nave espacial de 200 kg tenía una sección de rueda giratoria de 9 lados de 1,2 m de diámetro unida a una sección de vela en forma de abanico. Se puso en una órbita aproximadamente circular a ~ 575 km de altitud, 32,8 grados de inclinación. Los principales objetivos de su misión eran medir la radiación electromagnética solar en las regiones de rayos ultravioleta, rayos X y rayos gamma. En segundo lugar, fue para investigar las partículas de polvo en el espacio. La transmisión de datos finalizó el 6 de agosto de 1963. El satélite volvió a entrar en la atmósfera terrestre el 8 de octubre de 1981.
Instrumentación

Hubo una serie de experimentos de rayos X y rayos gamma a bordo de OSO 1 para realizar observaciones solares. Sin embargo, un instrumento, el Experimento de rayos gamma de la Universidad de Minnesota, fue diseñado para proporcionar mediciones preliminares de la intensidad y las propiedades direccionales de los rayos gamma de baja energía en el espacio. El detector operó en el rango de 50 keV – 3 MeV. Para el rango de 50-150 keV, un cristal de centelleo de NaI(Tl) monitoreaba la radiación a través de un escudo de plomo. El detector que opera en las regiones de energía de 0,3-1,0 MeV y 1,0-3,0 MeV utilizó dos centelleadores conectados como un telescopio de coincidencia Compton.
Ciencias
El experimento de rayos gamma de la Universidad de Minnesota en OSO 1 produjo una medida del flujo de rayos gamma extraterrestres entre 0,5 y 3,0 MeV y una indicación de su origen en la esfera celeste. Igualmente importante, este experimento comenzó a definir los problemas de fondo encontrados en la astronomía de rayos gamma.
Saber más:
Kuhikugu
Kuhikugu
Kuhikugu es un sitio arqueológico ubicado en Brasil, en la cabecera del río Xingu, en la selva amazónica. El área alrededor de Kuhikugu se encuentra hoy en parte del Parque Nacional Xingu. Kuhikugu fue descubierto por primera vez por el antropólogo Michael Heckenberger, que trabajó junto con el pueblo local Kuikuro, que son probablemente descendientes de los habitantes originales de Kuhikugu.[1]
Mapa de Kuhikugu
Complejo arqueológico e historia.
En sentido amplio, el nombre se refiere a un complejo arqueológico que incluye veinte ciudades y pueblos, repartidos en un área de alrededor de 7.700 millas cuadradas (20.000 km2), donde alguna vez vivieron cerca de 50.000 personas. Kuhikugu probablemente estuvo habitado desde hace unos 1.500 años hasta hace tan solo 400 años, cuando las personas que vivían allí probablemente murieron a causa de enfermedades traídas por los europeos. Aunque es probable que los europeos no la transmitieran directamente a los habitantes de Kuhikugu, sí transmitieron enfermedades directamente a socios comerciales de otras áreas. Cuando los europeos llegaron a esta zona, la civilización ya se estaba desmoronando.[2] Los primeros conquistadores que exploraron esta área probablemente vieron los últimos momentos de estas ciudades, y sus registros brindan una idea de cómo habrían sido estos lugares. Y cuando los europeos regresaron algún tiempo después, las ciudades y pueblos ya estaban consumidos por la selva tropical. Los indígenas ahora vivían en tribus alejadas de las ruinas, y la memoria de esa civilización se recordaba a través de la tradición oral.
Lo que distingue a las personas que habrían habitado Kuhikugu de otras civilizaciones sudamericanas son sus monumentos horizontales. A diferencia de los pueblos aztecas y mayas que construyeron pirámides, estos pueblos construyeron largos monumentos en el suelo para sus dioses. Presumiblemente, esto se debe a que sería imposible mantener una pirámide grande en una selva tropical y quedaría eclipsada por los árboles circundantes. La ingeniería era lo suficientemente sofisticada para puentes que cruzaban grandes secciones de río y fosos con fines defensivos. Además, la tierra negra que rodea la zona indica actividad agrícola a gran escala[1] [3]
Asentamiento X11
Estrictamente hablando, Kuhikugu es el asentamiento X11 de este complejo, ubicado cerca de Porto dos Meinacos en la orilla oriental del lago Kuhikugu (ahora Lagoa Dourada) a 12°33′30″S 53°6′40″W. Allí, así como en otros antiguos asentamientos del complejo Kuhikugu, las imágenes de satélite revelan que aún hoy el bosque difiere de las áreas prístinas circundantes, y la exploración terrestre revela que esto es un efecto del antrosol (cf. terra preta), conocido al Kuikuro como egepe. Directamente al norte del sitio X11 hay una aldea Kuikuro, cuyo pequeño tamaño proporciona una comparación interesante con la gran área de egepe que indica el asentamiento prehistórico.[4]
Se construyeron grandes zanjas defensivas y empalizadas alrededor de algunas de las comunidades de Kuhikugu.[1] [4] También existen grandes plazas en algunas de las ciudades de la región, algunas de alrededor de 490 pies (150 m) de ancho.[1] [4] Muchas de las comunidades en Kuhikugu estaban conectadas, con caminos que unían algunos ríos a lo largo de sus caminos y con canales para canoas que corrían a lo largo de algunos de los caminos. Los sitios X35 y X34 son comunidades importantes conectadas por dos de estos caminos. El sitio X11 tiene un total de 4 suburbios que se conectan a través de un río o una carretera, y todos parecen tener una relación constante entre sí.[4]
Es posible que existieran campos de mandioca (yuca) alrededor de las comunidades de Kuhikugu, lo que sugiere que la gente allí eran agricultores.[4] [5] Las presas y estanques que parecen haber sido construidos en el área también sugieren que los habitantes de Kuhikugu pueden haber estado involucrados en la piscicultura, que todavía practican algunos de sus descendientes Kuikuro de hoy en día.
La ciudad perdida de Z
Existe la posibilidad de que las leyendas sobre Kuhikugu hayan convencido al explorador británico, el teniente coronel Percy Fawcett, de emprender su expedición a la “Ciudad Z“. Fawcett afirmó haber descubierto una gran cantidad de fragmentos de cerámica en el Amazonas mientras realizaba trabajo de campo, y los sitios de Kuhikugu podrían haber tenido potencialmente una gran cantidad de cerámica en la superficie. Hay más de 20 sitios que abarca Kuhikugu, cada uno de los cuales podría haber albergado a más de 5.000 personas, y la planificación urbana sofisticada y las estructuras restantes podrían haber sido lo que Fawcett estaba buscando. Todos los sitios siguen un diseño similar, lo que significa que cualquiera de los sitios podría haber influido en Fawcett para buscar la Ciudad Perdida de ‘Z’.[3]

source : http://www.sciences-faits-histoires.com/blog/archeologie/bresil-kuhikugu-ou-site-x11-la-cite-z.html
Kuhikugu, ciudad perdida de Amazonia
Actualmente se acepta que el Amazonas ha sido el hogar de civilizaciones urbanas comparables en tamaño a las ciudades medianas de Europa Occidental. En los años 90, Hecklenberger revivió el mito de las ciudades perdidas de la Amazonia al estudiar los sitios arqueológicos del Alto Xingu, Brasil, entre ellos el famoso X11: Kuhikugu (M. Hecklenberger, pour la science n°388, 2010).
Sin embargo, el Amazonas ha transmitido durante mucho tiempo en la imaginación occidental moderna el Eros de la naturaleza original, virgen e inocente, luchando contra los thanatos de la modernidad destructiva. Las tribus, a diferencia de otras civilizaciones del sur o de Mesoamérica, no dejaron ninguna construcción duradera allí. Durante mucho tiempo se redujeron a los primitivos pueblos cazadores-recolectores que vivían en la Edad de Piedra y se conformaban con lo que la naturaleza estaba dispuesta a darles. En 1982, Pierre Gourou, en su obra seminal «Tierras de Buena Esperanza», contrastó las altas densidades del Delta del Mekong con las muy bajas densidades de la cuenca del Orinoco. Justificó esto por la ausencia o el dominio de las «técnicas de enmarcado». ¿Cómo podemos entonces concebir civilizaciones amazónicas pasadas que sean diferentes de las actuales? Esta visión cambiará gradualmente a partir de la década de 1970. Los investigadores redescubrieron entonces los escritos de los primeros exploradores. Michael Heckenberger cita los relatos de Gaspar de Carvajal, quien escribió en 1542 que «más de 200 piraguas, cada una de las cuales transportaba de 20 a 30 indios y unos 40, surgieron de las islas amazónicas que él pensaba que estaban deshabitadas». Casi dos siglos más tarde, el brasileño Antonio Pires de Campos se aventura cerca del Río Tapajos, al oeste de Xingu, y también evoca muchos pueblos bien conectados entre sí por amplios caminos. Estas observaciones serán corroboradas por R. Carneiro y especialmente por M. Heckenberger, «El alto Xingu es la única zona de la Amazonia brasileña que muestra claramente la continuidad de la ocupación indígena desde la prehistoria hasta la actualidad». Hacia el 1400 d.C., si no antes, las aldeas prehistóricas habían alcanzado proporciones impresionantes (20 a 50 hectáreas). Esto los hace entre los más grandes en cualquier área de tierras bajas de América del Sur en tiempos prehistóricos. Comprendían una variedad de estructuras, incluyendo calzadas lineales a lo largo de los márgenes de los caminos principales, patios centrales y zanjas profundas. Sin duda, esto habría ido acompañado de estructuras sobre el terreno como empalizadas, puentes y puertas de entrada. Se estima que tales aldeas podrían albergar alrededor de mil personas y que más de diez mil indios probablemente vivían al oeste del río Culuene en la región del alto Xingu. (povos indigenas brasil). Heckenberger cartografiará con la precisión de un agrimensor zanjas amplias y profundas y caminos anchos como las actuales autopistas, empalizadas que protegen pueblos, territorios explotados más o menos intensamente, numerosos pueblos unidos entre sí por una red de caminos muy sofisticada. Luego toma conciencia de un alto grado de integración regional. Los espacios ocupados se organizaron sobre cerca de 250 km², incluyendo 50 km² para conjuntos urbanos en el sentido estricto del término. Más recientemente, las excavaciones llevadas a cabo por el equipo anglo-brasileño de Jonas Gregorio de Souza revelarán un continuo de ciudades interconectadas de la civilización arahuaca en más de 400.000 km².
«Al mismo tiempo, regiones como la del sudoeste de la Amazonia albergaban una de las mayores diversidades de familias lingüísticas de la Amazonia, y la naturaleza multiétnica/multilingüística de los sistemas regionales queda ejemplificada por el Alto Xingu34». Se ha formulado la hipótesis de que el cinturón de arahuacos y otros grupos a lo largo del SRA constituye un sistema formativo suprarregional que estuvo presente desde finales de la época precolombina. De ser cierto, esta conexión sugeriría una distribución ininterrumpida de los movimientos de tierra a lo largo de 1800 Km. de este a oeste en el SRA y un impacto humano precolombino más intenso en los bosques de esta región que el anteriormente postulado «Los constructores de tierra precolombinos se asentaron a lo largo de todo el borde sur del Amazonas».
Se trata de una visión que demuestra la imposibilidad para las civilizaciones amazónicas de desarrollar intercambios complejos entre ellas y de cultivar intensamente un terruño amazónico latinoamericano y estable que se encuentra en estado puro. Lo que se considera en el mejor de los casos como «bons sauvages» es un modelo para la salvaguarda del planeta, ¿lo sigue siendo?
Hecklenberger compara en efecto las ciudades del Alto Xingu con las ciudades-jardín que podrían ser el modelo más conciliador de urbanización duradera y de protección de la biodiversidad. Pero las reservas indias parecen ser muy frágiles en cuanto a la deforestación amazónica, la soja OGM y las tierras extensas.
(Este texto está ampliamente basado en el artículo de M. Hecklenberger en la revista Pour la science n°388, 2010)


La civilización Kuhikugu
En 2008, la prestigiosa revista científica Scientific American publicó un artículo redactado por David Biello (editor asociado) bajo el título Antigua amazonía realmente altamente Urbanizada, en la cual resumía las investigaciones del antropólogo Michael Heckenberger —publicadas, a su vez, en Science— en donde exponía las conclusiones de años de investigación que demostraban que en el estado brasileño de Mato Grosso, especialmente en proximidades del Alto Xingú , se habrían descubierto 28 «ciudades», pueblos y aldeas que habrían sostenido una población de unas 50.000 personas.
No se trataba de «Z», ni de templos y viviendas de piedra, sino de espacios urbanos donde lógicamente se había aprovechado al máximo los recursos naturales del lugar: árboles y tierra.
Lo hallado fueron evidencias de zanjas, circulares en la mayoría de los casos, cuadrangulares en otros, de unos tres metros que supieron tener de profundidad y diez de ancho, redescubiertas porque la lamentable deforestación habría dejado al descubierto, observable en ocasiones desde aeronaves y en otras desde tierra, de las evidencias de esas construcciones. Estamos ante grandes conglomerados sedentarios, construidos entre el año 400 y 1.400 de nuestra era, rodeados por esas zanjas y empalizadas de madera.
A su vez, estos pueblos estaban comunicados entre sí por canales navegables, rectilíneos, donde canoas llevaban y traían mercaderías (volveremos enseguida sobre este detalle), y caminos que cortaban la selva también de manera rectilínea. De estos «caminos» supe ver evidencias en lo profundo del Paraguay hace ya años, y me comentaban los lugareños que «los antiguos» procedían de la siguiente forma: talaban la selva en sentido y ancho de donde querían establecer la vía de comunicación. Dado que la vegetación, en esas latitudes, tarda pocas semanas en hacer desaparecer todo vestigio de haber sido destazada en algún momento, lo que hacía era sembrar, en esos espacios despejados, un tipo de pastizal llamado «paja brava», que crece hasta unos 50 o 60 centímetros de altura. Grueso, áspero, literalmente mata todo brote, toda extensión de la vegetación selvática que tratara de ganar el espacio anterior, con lo cual décadas y hasta siglos después era posible seguir observando evidencias de donde pasaban estas «carreteras en la selva».

La «cultura Kuhikugu» (nombre que se ha dado a este todavía tan poco conocido horizonte cultural tomando el nombre de los relatos orales de los «kuikuros», etnia local que ya merecerá toda nuestra atención, y que se consideran herederos de esos ancestrales pobladores) compartía la particularidad que todas las aldeas y ciudadelas tenían una carretera principal que corría de noreste a suroeste a lo largo del eje del Solsticio de Verano y se disponían a un promedio de cinco kilómetros unas de otras. Y, finalmente, se supone que desaparecieron sus habitantes exterminados por las enfermedades que se extendieron por el subcontinente más rápidamente que los feroces y salvajes conquistadores, al punto que luego la selva recuperó sus espacios naturales.
Estos espacios descritos quizás no serán suficientes, a ojos del lector crítico, para justificar el sueño de Fawcett; sin embargo, es apenas la parte emergente de una trama muy cerrada y extensa de historias civilizatorias sobre las que apenas —acudo a la metáfora blavatskyana— estamos levantando un extremo de velo.
Porque si nos dirigimos un poco más al oeste, más precisamente en buena parte del estado de Beni en Bolivia y algo de Rondónia en Brasil, encontramos los llamados «Llanos de Mojos». Los «Moxos» (o los «Musus», como los encontramos denominados en escritos ya del siglo XVI) son asiento de otro misterio ya conocido de más antaño pero hasta ahora desconsiderado: las «lomas». ¿Qué son las mismas? Pues montículos absolutamente artificiales. Muchos, de tierra acarreada y apisonada; otros muchos, de ladrillos y bloques de adobe cubiertos de tierra. ¿Dimensiones?: algunos, los más grandes, llegan a los 20 metros de altura, por cien o ciento cincuenta metros de lado. Más aún: sobre esas plataformas en muchos casos se levantan terrazas, muros, empalizadas y verdaderas pirámides truncadas. ¿Ubicación?: unos 20 cerca de la ciudad de Trinidad; unos 380 alrededor de la población llamada Casarabe (llamada así porque entre fines del siglo XVIII y principios del XIX comenzaron a radicarse muchos inmigrantes de origen libanés y sirio, con lo cual se le llamaba coloquialmente la «casa árabe», que devino en el toponímico de referencia), y en toda la región mencionada… ¡se estiman unos 20.000!
En un interesantísimo estudio disponible en Internet, bajo el título A la sombra de los Andes. Arquitectura monumental en los Llanos de Mojos, los arqueólogos Carla Jaimes Betancourt y Heiko Prümers desarrollan un completo estudio sobre estos «montículos», señalando, muy acertadamente, que si estuvieran en Perú serían reconocidos como «huacas» o «pirámides truncadas» (esto, para contrarrestar la tendencia descalificadora con que la mirada de los lugareños —y también las autoridades zonales— contemplan estas ruinas). Pero además de su revalorización, estos profesionales ilustran sobre aspectos apasionantes. En efecto, aquí también tenemos Caminos Elevados, terraplenados, que comunican entre sí los montículos.
Ahora bien; en temporada de lluvias, toda esta enorme extensión —que cubriría dos veces la superficie de Suiza— se inunda. Los montículos, entonces, emergen como «islas» en el mar, siempre comunicados por los caminos elevados. Esa concepción visual, de sitios culturales unidos por caminos artificiales en medio de un enorme lago poco profundo, ¿a dónde nos remite?
A la Huey Tenochtitlán, con sus «chinampas» o islas artificiales, y los pueblos aledaños (hoy, absorbidos por el crecimiento de la urbe) como Xochimilco o Tlatelolco.
Los Llanos de los Mojos quedaban en el camino, desde tiempos ancestrales, del «Gran Paititi», el reinado extraño que ya los conquistadores supieron buscar por esas latitudes. En Santa Cruz encontramos Samaipata, a la que algunos estudios le adjudican autoría a los poco conocidos Mojocoyas, y que yo creo la avanzada occidental de la civilización de Kuhikugu. Que, por cierto, no es la Kuhikugu decadente de las aldeas con empalizadas descritas párrafos antes: la «civilización de los Mojos» surge alrededor del 500 a.C, extendiéndose, según algunos autores, hasta el 1.000 d.C.
Interesante fenómeno: tomando ambos horizontes señalados, cuanto más atrás vamos en el tiempo más avanzada es la cultura.
De modo que tenemos esta cultura, que tanta sintonía tiene con ciertas particularidades mexicas, por remota que esta última parezca. Es más; se ha descubierto que junto a los caminos terraplenados y elevados discurrían canales por donde, en tiempos de sequía, sin duda grandes canoas continuaban llevando y trayendo mercaderías (además de servir de administrador de sistemas de riesgo). Insisto: esta descripción visual es absolutamente coincidente con lo que los «nahuas» habrían hecho en esos mismos tiempos en el Ánahuac, el México prehispánico.
Y aquí comienza a asomar un «secreto tolteca» anticipado en el título: en Rondónia y Mato Grosso —y esto ya lo señala Fawcett— existía una etnia (literalmente exterminada, aunque algunos descendientes se hayan mestizado completamente) que se llamaban a sí mismo «nahuas».
Recordemos que los «nahuas» han sido la etnia troncal de donde salen distintos «horizontes culturales» o pueblos, que conocemos como zapotecas, olmecas, totonacas, mixtecas, otomíes, etc y etc., en el Ánahuac prehispánico. Ánahuac que, justamente, significa «tierra de nahuas».
Que una «tribu» en el Amazonas se identifique con el mismo nombre, cuando menos, llama poderosamente la atención. Pero aún debemos señalar que todos estos pueblos amazónicos tenían dialectos y lenguas de origen Arawak. Es Fawcett quien, por esta correspondencia lingüística, supone que los «arawaks» (que hemos conocido como «caribes», los «araucas», los «araucanos» del sur de Chile y los «antis» de Perú (de donde surge el toponímico «Andes») pertenecen a la misma raza original.
Hoy sabemos que los «caribes» se extendieron por Sudamérica, dando origen a ramas como los Tupíes, los Tapuyas y los Carijós. De hecho, los Tupíes originan los guaraníes, de presencia dominante en el escenario sudamericano precolombino.
Fuertes en el NE brasileño, se supone que cierta rama de los caribes es responsable de lo que hoy conocemos como «Stonehenge del Solsticio de Verano»: una extraña construcción megalítica en cercanías de Rego Grande, en el estado de Amapá, donde un conjunto de moles de granito de autores desconocidos y formas extrañas que remiten a reminiscencias lovecraftianas desconcierta a propios y extraños. Se le llama de esa particular forma porque en una de las rocas existe un orificio por donde, en el solsticio de verano, atraviesa el sol a mediodía creando un círculo sobre otra piedra a alguna distancia.


Por ciertos restos hallados al pie de estos monolitos (fuegos, quizás rituales, encendidos en los puntos donde fueron instalados) se estima su erección aproximadamente en el 3.000 a.C. Sin duda no tiene relación con la cultura Kuhikugu por su antigüedad, pero demuestra que a lo largo y a lo ancho de lo que hoy llamamos Brasil hubo numerosos pueblos, aún desconocidos, en un período temporal dilatadísimo.
En la desembocadura del Amazonas sobre el Atlántico se encuentra (ya la mencionamos) la Isla de Marajó. En la misma se han encontrado «montículos» en un todo afines a los de los Llanos de los Mojos, aunque si se mira un mapa llama la atención la enorme distancia entre un área y otra. Empero, la identidad de construcciones da a suponer que de alguna manera —quizás ocupando el río Amazonas como vía de comunicación— grupos que se influyeron mutuamente migraron por ese conducto.
Del río Amazonas, mientras tanto, hay un par de cosas que debemos comentar. Por ejemplo, que su nombre autóctono original no era, obviamente, el de Amazonas, sino «Solimoes», y es aquí donde Fawcett se pregunta si en ese nombre no vemos la presencia del nombre de Salomón, y lo vincula con las famosas «minas» de donde fluía el oro y la plasta que este rey hebreo, especulando si, quizás, no habrían navegado en tiempos remotos a través del Atlántico y, por este río, llegado a casi sus fuentes en territorio peruano donde el oro y la plata —especialmente la segunda— abunda.
Sabemos que se le llamó «amazonas» por las historias de mujeres guerreras que vivirían en sus márgenes. Pues bien, sépase que las mismas efectivamente existieron y no se trata de un fábula de los conquistadores. Estas mujeres eran llamadas «Aikembenanas» por los otros pueblos y ya es una certeza etnográfica su existencia.
El secreto tolteca
Si bien Fawcett no había dedicado años a explorar las culturas antiguas del México prehispánico, es un hecho —sencillo de demostrar— que cuando menos, en teoría, lo había estudiado profundamente. No solamente se trata aquí de esa hilación de conocidos y amigos que pudieron hacerle llegar hallazgos de Maler y otros, voy a citar algunas referencias no menores.

Por ejemplo, en su libro ya citado, al hablar de los Toltecas los llama «sabios artistas». Puede parecer un detalle menor, y no lo es: aún hoy, son (somos) un número reducido los que conocemos algo del idioma náhuatl original donde la palabra tolteca se traduce, efectivamente, como «sabio artista»; mucho menos común hubiera sido ese conocimiento a fines del siglo XIX o principios del XX salvo que se esté profundamente empapado de estudios sobre el particular.
Fawcett con
struye su propia teoría. Según la misma, en tiempos remotísimos lo que hoy llamamos Brasil era apenas una de varias islas que ocupaban el Hemisferio Sur. Grandes cataclismos hicieron que el océano se hundiera en ciertos puntos y se elevara en otros (no podemos obviar aquí ver la influencia teosófica, con la presencia intensa de Mu y Lemuria). Tierras que emergieron se habrían fusionado con esa «isla» y formó lo que hoy conocemos como Sudamérica. Al mismo tiempo, otra isla se hundía en el Atlántico. Atlántida. De la misma escapa una casta de sabios artistas, sacerdotes y educadores, los primitivos toltecas —Fawcett mismo dice que emplea ese término a falta de uno mejor— quienes luego de permanecer durante siglos en México extendieron su influencia hacia el Sur. Aislados los grupos (si por guerras, hambrunas, cataclismos; vaya a saberse) un grupo de toltecas «degenerados» se transforma en los «caribes» que conocemos como tales.
Permítaseme hacer aquí una digresión: hace años señalé que hubo una corriente civilizatoria que se inició en la Atlántida y, cruzado a través de décadas hacia Occidente y Oriente, cruzó el Atlántico y llegó a América, siguiendo a un líder (o las enseñanzas y directivas de ese líder) que habría pasado a la historia y la leyenda con el nombre de «Kar», «K’ar» o «K’a’r’» (según las pronunciaciones). Señalé en su momento el «rastro toponímico» que dejaba su nombre a través de la geográfica, y en esa ocasión algunos críticos me atacaron diciendo que se trataba de una tontería pues, según ese razonamiento, una «car-nicería» indicaría el paso de Kar por allí. Sin embargo, no necesito discutir mucho: todos ustedes saben que muchísimos toponímicos se crean usando como raíz adjetivos calificativos del lugar y nombres propios. El pensamiento de Fawcett, entonces, ratifica ésta mi teoría.
Bien, sigamos. El explorador señala en su libro esa presencia «nahua» ya mencionada en proximidades del Alto Xingú. Cerca, también, se encuentra otro grupo cultural, los «Maxubis», con quienes conviviera un tiempo, llamándole poderosamente la atención el ritual de, todos los amaneceres, formar toda la aldea mirando al naciente Sol, elevar sus manos en esa dirección y cantar al unísono un himno de salutación al mismo (costumbre que se encontraba hasta épocas muy recientes entre los mexicas). Estos «toltecas», incluso y siempre según la mirada de Fawcett, habrían llegado a ser los fundadores de Tiwanaku.
Podría decirse que era una teoría demasiado simplista ese «difusionismo excesivo» que proponía el inglés. Por cierto, llega a señalar que veía como posible que una rama de los Tupíes hubiera migrado a través del Pacífico hasta la Polinesia, ocupando en el camino Rapa Nui (Isla de Pascua).
Puede parecer excesivamente simplista este «difusionismo», pero en puridad no podría negarse puntualmente el extraordinario parecido que tienen las tallas en madera de los «fueguinos» (en puridad, los selk’nam, onas y yámanas) con los moais de la Isla de Pascua. Puede verse como exagerado ese difusionismo. Pero quien, como un servidor, ha tenido la oportunidad de estar frente a los moais y contemplar directamente las tallas onas conservadas en museos, no puede negar su extraordinario parecido.
Permitan ustedes que yo agregue, a las ideas de Fawcett, un elemento menor pero sugestivo. He hablado ya de los «kuikuros», el grupo tribal (hoy, de unos 500 individuos) que en los Altos del Xingú son los herederos (dicen serlo) de la cultura Kuhgikugu. Muchos de ellos ya están integrados a la civilización occidental, y de los que permanecen viviendo en sus aldeas originales supongo lo hacen por la interesante conveniencia del turismo. Con un altísimo cociente intelectual uniformemente distribuido entre ellos (es hasta simpático verles totalmente inmersos en su ambiente folklórico… pero sin dejar de revisar —algunos, claro— periódicamente sus celulares, aceptando sin ambagues que cuidar sus raíces no va en detrimento de estar enterados de lo que pasa en el mundo vía redes sociales), una de sus costumbres es conservar vestimentas rituales que emplean en ceremonias ancestrales. En ese ajuar se ocupan sólo cuatro colores: negro, rojo, amarillo y blanco. Los cuatro colores, precisamente, que identifican desde siempre a los «cuatro rumbos» del pensamiento mexica, a las nahui mitl, las «cuatro flechas» simbólicas. Son los colores de los «rezos» que se cuelgan ceremonialmente en el «Árbol de Rezos», los colores de las «cuatro puertas» de la ceremonia del Temazcal Guerrero…
Debe estar conectado para enviar un comentario.