Vehículos planetarios
Denominamos “Vehículos planetarios”, también astromóviles, a aquellos móviles, tengan forma de vehículo terrestre o no, y que tengan que desplazarse por la superficie (o cerca de ella) de un planeta u objeto astronómico, con la misión de transportar astronautas, objetos, laboratorios, etc, o cualquier otra misión, y siempre que se desplacen por sus medios. Para evitar contaminaciones (en lo posible), son vehículos eléctricos. Algunos son vehículos guiados por los astronautas (como el rover de los Apolo), y otros están guiados por radio. Evidentemente se habrán desplazado sobre la Tierra, para probar su utilidad, autonomía, etc.
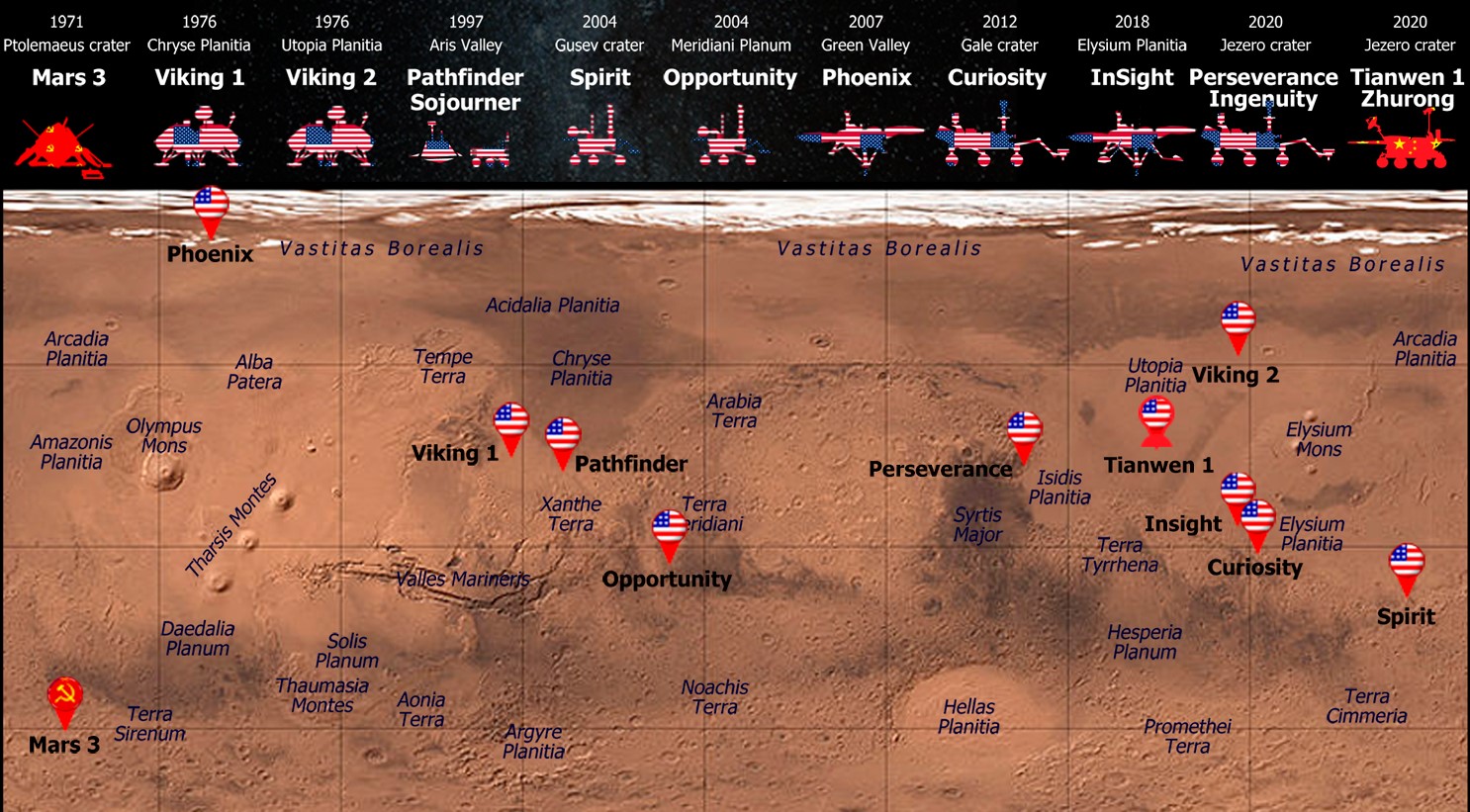
Amartizajes
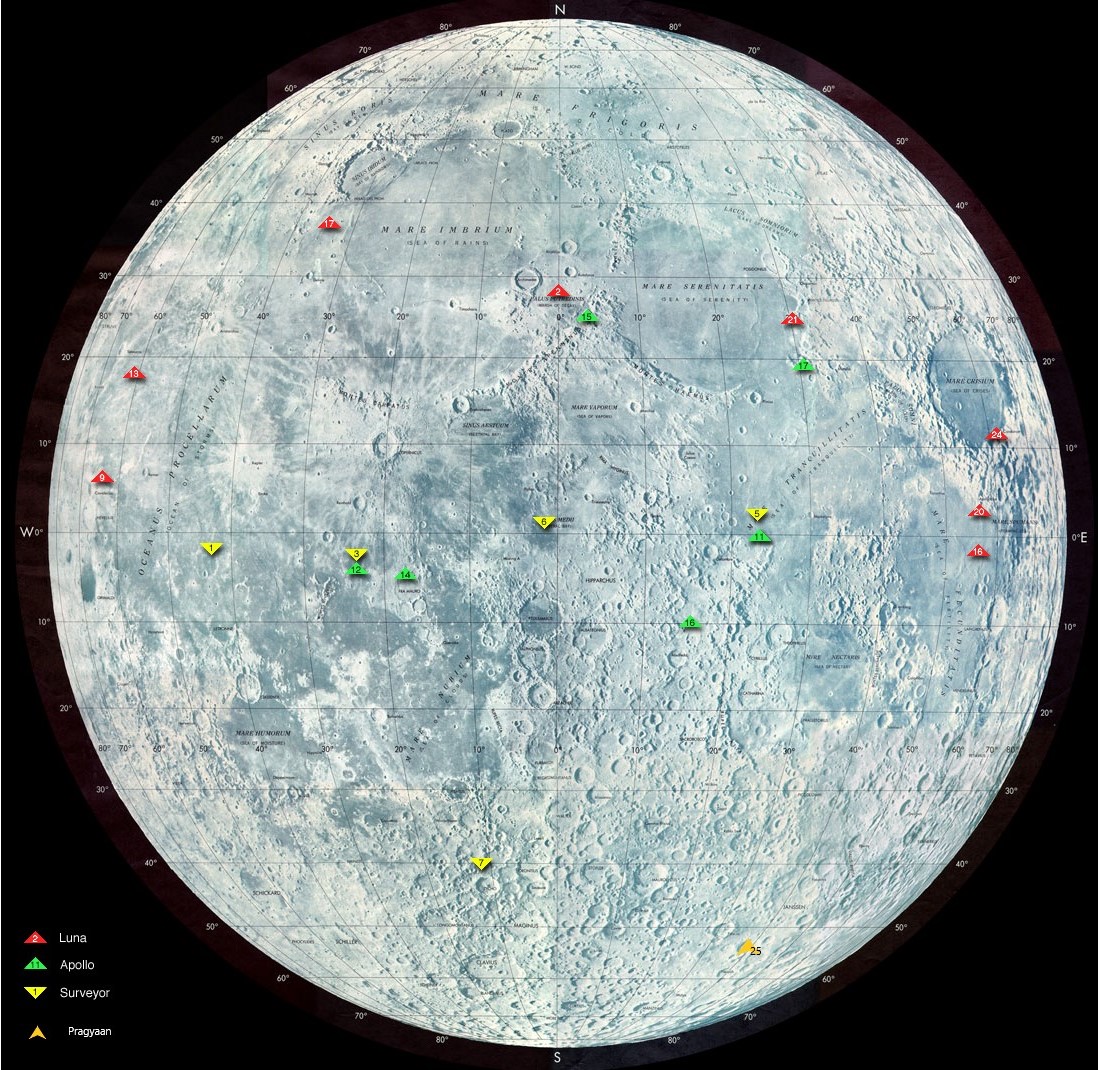
Alunizajes
|
Pragyan (rover)
Pragyan (rover)
Pragyan montado en la rampa del módulo de aterrizaje Chandrayaan-2
Tipo de misión: vehículo lunar
Operador: ISRO
Duración de la misión
- Chandrayaan-2 : 0 días (fallo en el aterrizaje)
- Chandrayaan-3 : 2 días (transcurridos)
By Indian Space Research Organisation (GODL-India), GODL-India, https://commons.wikimedia.org/w/index.php?curid=135856753
Propiedades de la nave espacial
Fabricante: ISRO
Masa de aterrizaje
- Chandrayaan-2: 27 kg (60 libras)
- Chandrayaan-3: 26 kg (57 libras)
Dimensiones: 0,9 m × 0,75 m × 0,85 m (3,0 pies × 2,5 pies × 2,8 pies)
Fuerza: 50 W de paneles solares
Inicio de la misión
Fecha de lanzamiento
- Chandrayaan-2: 22 de julio de 2019 14:43:12 IST (09:13:12 UTC )
- Chandrayaan-3: 14 de julio de 2023 14:35 IST (09:05 UTC) [1]
Sitio de lanzamiento: SDSC Segunda plataforma de lanzamiento .Centro Espacial Satish Dhawan en Sriharikota de Andhra Pradesh el 14 de julio.
Contratista: ISRO
Implementado desde: Vikram
Fecha de implementación
Chandrayaan-2: previsto: 7 de septiembre de 2019 [2]
Resultado: Nunca desplegado desde un módulo de aterrizaje destruido. [3]
Chandrayaan-3: 23 de agosto de 2023 [4]
Vehículo lunar
Fecha de aterrizaje: 6 de septiembre de 2019, 20:00; 21:00 UTC [5]
Lugar de aterrizaje
Intento: 70.90267°S 22.78110°E [6] (Destinado)
Aterrizaje forzoso al menos a 500 m del lugar previsto. (Actual)
Distancia recorrida: 500 m (1600 pies) (previsto)
Pragyan (del sánscrito : Prajñānam, romanizado : prajñānam, literalmente ‘sabiduría’,[7] [8] (hindi :pragyan (ayuda · información ))[7] [9] indio) es un rover lunar que forma parte de Chandrayaan-3 , una misión lunar desarrollada por la Organización de Investigación Espacial de la India (ISRO).[10] Una versión anterior del rover se lanzó como parte de Chandrayaan-2 el 22 de julio de 2019 y fue destruida junto con su módulo de aterrizaje, Vikram , cuando se estrelló en la Luna el 6 de septiembre.[3] [11] Chandrayaan-3, junto con nuevas versiones del módulo de aterrizaje Vikram y del rover Pragyan lanzados el 14 de julio de 2023,[1] Aterrizó con éxito cerca del polo sur lunar el 23 de agosto.[12]
Descripción general
Vista esquemática del rover
Pragyan tiene una masa de aproximadamente 27 kg (60 lb) y unas dimensiones de 0,9 m × 0,75 m × 0,85 m (3,0 pies × 2,5 pies × 2,8 pies), con una potencia de salida de 50 vatios . [13] Está diseñado para funcionar con energía solar [14] [15] El rover se mueve sobre seis ruedas y está destinado a recorrer 500 metros (1.600 pies) sobre la superficie lunar a una velocidad de 1 cm (0,39 pulgadas) por segundo, realizando análisis en el sitio y enviando los datos a su módulo de aterrizaje para retransmitirlos a la tierra.[16] [17] [18] [19] [20] Para la navegación, el rover estaba equipado con:
- Visión 3D estereoscópica basada en cámaras: dos 1 megapíxel de NAVCAM monocromáticas frente al rover para proporcionar al equipo de control terrestre una vista 3D del terreno circundante y ayudar en la planificación de rutas generando un modelo de elevación digital del terreno.[21] IIT Kanpur contribuyó al desarrollo de subsistemas para la generación de mapas basados en luz y la planificación del movimiento del rover.[22]
- Control y dinámica del motor: el diseño del rover cuenta con un basculante-bogie sistema de suspensión y seis ruedas, cada una impulsada por motores eléctricos CC sin escobillas independientes. La dirección se logra mediante la velocidad diferencial de las ruedas o dirección deslizante.[23]
El tiempo de funcionamiento previsto del rover es de un día lunar o unos 14 días terrestres, ya que su electrónica no fue diseñada para soportar la gélida noche lunar. Su sistema de energía tenía implementado un ciclo de sueño/despertar alimentado por energía solar, lo que podría haber resultado en un tiempo de servicio más prolongado de lo planeado.[24] [25]
Lugar de aterrizaje planificado

Se seleccionaron dos lugares de aterrizaje en la región lunar del polo sur , cada uno con una elipse de aterrizaje de 32 km × 11 km (19,9 mi × 6,8 mi).[6] El lugar de aterrizaje principal (PLS54) está en /70.90267 , aproximadamente a 350 km (220 millas) al norte del borde del Polo Sur-Cuenca Aitken .[26] [6] El lugar de aterrizaje alternativo (ALS01) está en /67,87406 . El sitio principal está en una llanura elevada entre los cráteres Manzinus C y Simpelius N.[27] [26] en la cara cercana de la Luna . [6] Los criterios utilizados para seleccionar las zonas de aterrizaje fueron una ubicación en la región del polo sur y en el lado cercano, una pendiente de menos de 15 grados, con rocas de menos de 50 cm (20 pulgadas) de diámetro, un cráter y una distribución de rocas, estar iluminadas por el sol durante al menos 14 días, y con crestas cercanas que no ensombrezcan el sitio por períodos prolongados.[6]
El módulo integrado de Chandrayaan-3, justo antes de ser cargado en la cápsula
Tanto el sitio planificado como el sitio alternativo se encuentran dentro del cuadrilátero polar LQ30. La superficie probablemente consiste en derretimiento por impacto, posiblemente cubierto por eyecciones de la enorme cuenca del Polo Sur-Aitken y mezclado por impactos cercanos posteriores.[28] La naturaleza del derretimiento es mayoritariamente máfica .[28] es decir, es rico en minerales de silicato , magnesio y hierro . La región también podría ofrecer rocas científicamente valiosas del manto lunar si el impactador de la cuenca excavara toda la corteza.[29]
Aterrizaje forzoso de 2019
Más información: Chandrayaan-2
El módulo de aterrizaje Vikram, que transportaba a Pragyan, se separó del orbitador Chandrayaan-2 el 7 de septiembre de 2019 y estaba previsto que aterrizara en la Luna alrededor de la 1:50 am IST . El descenso inicial se consideró dentro de los parámetros de la misión, superando los procedimientos de frenado críticos según lo previsto. El descenso y el aterrizaje suave debían ser realizados por las computadoras de a bordo de Vikram, pero el control de la misión no pudo hacer correcciones y, por lo tanto, impactó la superficie lunar.[30]
Última actualización de Chandrayaan-3: ISRO dice que la caminata lunar comienza mientras el Rover Pragyan avanza
Misión Chandrayaan-3 según lo previsto, el rover comienza su caminata lunar y realizará experimentos durante 14 días.
India dio un paseo por la luna”, dijo la Organización de Investigación Espacial de la India, dirigida por el estado, y agregó que el rover Chandrayan-3 llevaría a cabo experimentos durante 14 días.
La Organización de Investigación Espacial de la India (ISRO) dijo el jueves (24/08) que Pragyan Rover comenzó su caminata lunar sobre la superficie lunar. En X (anteriormente Twitter), ISRO dijo: “Misión Chandrayaan-3. Rover Chandrayaan-3 a MOX, ISTRAC, ¡comienza la caminata lunar!”
El vehículo lunar ‘Pragyan’ se deslizó por una ram pa desde el módulo de aterrizaje de la nave espacial de la India pocas horas después de su histórico aterrizaje cerca del polo sur de la Luna, dijeron el jueves funcionarios espaciales indios, mientras el país celebraba su nuevo logro científico.
pa desde el módulo de aterrizaje de la nave espacial de la India pocas horas después de su histórico aterrizaje cerca del polo sur de la Luna, dijeron el jueves funcionarios espaciales indios, mientras el país celebraba su nuevo logro científico.
“India dio un paseo por la luna”, dijo la Organización de Investigación Espacial de la India, dirigida por el estado, y agregó que el rover Chandrayan-3 llevará a cabo experimentos durante 14 días, incluido un análisis de la composición mineral de la superficie lunar.
En X (antiguo Twitter), ISRO dijo: “Misión Chandrayaan-3: todas las actividades están según lo previsto. Todos los sistemas son normales. Las cargas útiles del módulo de aterrizaje ILSA, RAMBHA y ChaSTE están encendidas hoy. Las operaciones de movilidad del rover han comenzado. Carga útil SHAPE activada El módulo de propulsión se encendió el domingo.”
Chandrayaan-3 Rover a MOX, ISTRAC, ¡comienza la caminata lunar!
Hoy temprano, ISRO también publicó las imágenes de la cámara Lander Imager que capturó la imagen de la luna justo antes del aterrizaje en la superficie lunar.
“Así es como la cámara Lander Imager capturó la imagen de la luna justo antes del aterrizaje”, publicó ISRO en X.
Después de un viaje de 40 días al espacio, el módulo de aterrizaje Chandrayaan-3, ‘Vikram’, aterrizó en el inexplorado Polo Sur lunar el miércoles por la noche, convirtiendo a la India en el primer país en hacerlo.
India también se convirtió en la cuarta nación después de Estados Unidos, Rusia y China en realizar con éxito una misión de alunizaje.
La nave espacial Chandrayaan-3 colocó el módulo de aterrizaje Vikram en la superficie lunar, inclinándolo a una posición horizontal antes del aterrizaje.
La nave espacial fue lanzada desde el Centro Espacial Satish Dhawan en Sriharikota de Andhra Pradesh el 14 de julio.
El Dr. S. Unnikrishnan Nair, director del Centro Espacial Vikram Sarabhai (VSSC) , confirmó que el evento histórico se desarrolló alrededor de las 12:30 am del jueves.
El rover, ahora en movimiento, está explorando activamente la superficie de la Luna y está dejando su huella indeleble a medida que avanza.
Las distintivas ruedas del rover Pragyan llevan un grabado emblemático con el logotipo de la Organización India de Investigación Espacial (ISRO) y el emblema nacional de la India.
Mientras el rover navega por la extensión lunar, estos grabados están destinados a convertirse en un testimonio de la destreza tecnológica y la ambiciosa misión lunar de la India.
La emoción es palpable cuando los paneles solares del rover y del módulo de aterrizaje se han desplegado de manera efectiva, allanando el camino para la siguiente fase de la misión. Está previsto que el rover se dedique a la recolección de muestras lunares, la ejecución de complejos experimentos y la transmisión de datos invaluables a su base de origen, el módulo de aterrizaje.
Por qué el Pragyan Rover fabricado por ISRO puede funcionar solo durante 14 días
Por el rover pragyan de shashank isro , rover pragyan
Pragyan era el rover de Chandrayaan-2, una misión lunar desarrollada por la Organización de Investigación Espacial de la India (ISRO), lanzada en julio de 2019. Pragyan fue destruido junto con su módulo de aterrizaje, Vikram, cuando se estrelló en la Luna en septiembre de 2019 y Nunca tuve la oportunidad de desplegarme.
El tiempo de funcionamiento previsto del rover Pragyan era de un día lunar o alrededor de 14 terrestres días, ya que su electrónica no está diseñada para soportar la gélida noche lunar. Intentemos saber ¿por qué?
Antes de profundizar en el tema real, debes comprender algunos datos básicos sobre la Luna.
La circunferencia de la Tierra es de 40.075 km y la velocidad de rotación es de 1674 km/h. Por lo tanto, se necesitan 23,939 horas (40075 dividido por 1674) para completar una vuelta completa sobre su eje.
Ahora, si consideramos lo mismo para la Luna, su circunferencia es de 10.921 km y su velocidad de rotación es de 0,004627 km/s, por lo que tarda 2.360.276,637 segundos (10921 dividido por 0,004627), es decir, 656 horas o 27,32 días.
Significa que la Luna tarda 27,3 días en completar un día terrestre.
Teniendo en cuenta los hechos anteriores, debemos entender que un día en la Tierra equivale a 27 días en la Luna. Según los informes de ISRO, el rover recibe su energía operativa de energía solar que sólo se puede obtener durante el día. Durante la noche hace mucho frío y alcanza hasta 180 grados. Nuestros científicos han calculado la vida útil del rover según el horario diurno, que es de 14 días en la Luna.
Chandrayaan-3 (2023)
Chandrayaan-3 fue lanzado a bordo de un cohete LVM3 -M4 el 14 de julio de 2023, a las 09:05 UTC desde el Centro Espacial Satish Dhawan Second Launch Pad en Sriharikota, Andhra Pradesh, India. El 23 de agosto de 2023, cuando el módulo de lander se acercaba al punto bajo de su órbita, sus cuatro motores se dispararon como una maniobra de frenado a 30 kilómetros (19 mi) sobre la superficie de la Luna.  Después de 11,5 minutos, el módulo de lander estaba a 7,2 km (4,5 millas) por encima de la superficie; mantuvo esta altitud durante unos 10 segundos, luego se estabilizó utilizando ocho propulsores más pequeños y rotó de una posición horizontal a una posición vertical mientras continuaba su descenso.
Después de 11,5 minutos, el módulo de lander estaba a 7,2 km (4,5 millas) por encima de la superficie; mantuvo esta altitud durante unos 10 segundos, luego se estabilizó utilizando ocho propulsores más pequeños y rotó de una posición horizontal a una posición vertical mientras continuaba su descenso.
Una de las imágenes capturadas por la sonda Chandrayaan-3.Imagen: ISRO
Luego utilizó dos de sus cuatro motores para ralentizar su descenso a aproximadamente 150 metros (490 pies); se cernía allí durante unos 30 segundos y se situó en un punto de aterrizaje óptimo antes de continuar hacia abajo y tocar abajo a las 12:32 UTC.[37][38]
Después de l legar al polo sur de la Luna, Chandrayaan-3 desplegó el rover para explorar la superficie de caja, aprovechó cámaras integradas para enviar videos de su entorno, y comenzó a trabajar en los objetivos de investigación previstos para una exploración de dos semanas de la Luna.[39]
legar al polo sur de la Luna, Chandrayaan-3 desplegó el rover para explorar la superficie de caja, aprovechó cámaras integradas para enviar videos de su entorno, y comenzó a trabajar en los objetivos de investigación previstos para una exploración de dos semanas de la Luna.[39]
Pragyan se despliega en la Luna
El primer video del rover, publicado el 25 de agosto de 2023, lo mostró saliendo del módulo de aterrizaje Vikram en una rampa y conduciendo a la Luna. ISRO publicó el video en un hilo en Twitter que también incluía imágenes del módulo de aterrizaje acercándose a su sitio de aterrizaje y pateando polvo mientras tocaba tierra en la superfi cie. ISRO escribió después que los dos instrumentos científicos del rover habían sido encendidos y que se había movido ocho metros.[40]
cie. ISRO escribió después que los dos instrumentos científicos del rover habían sido encendidos y que se había movido ocho metros.[40]
El rover Pragyan captura a la sonda Vikram en una instantánea. / ISRO
El 26 de agosto, la ISRO publicó un nuevo video, filmado desde el módulo de langa, de la unidad del rover, alejándose casi fuera de la vista del módulo de lander.[41] El 27 de agosto, publicó dos imágenes después de que el rover se encontrara con un gran cráter posicionado tres metros por delante de su ubicación. Sin embargo, el rover se dirigió de forma segura por un nuevo camino después.[42][43]
Más tarde, el 30 de agosto, a las 7:35 am, el rover tomó una foto del módulo degillo Vikram, mostrando sus dos cargas útiles, Chaste e ILSA, había desplegado.[44] Otra imagen fue captada a las 11:04 del mismo día, desde una distancia de 15 m.[45]
El 2 de septiembre, el rover terminó todas las tareas y entró en modo de sueño en preparación para despertar el 22 de septiembre, sin embargo, no se esperaba que continuara trabajando.[46] Su batería estaba completamente cargada cuando entró en hibernación.[47] Sin embargo, después de más de dos semanas, tanto el rover como las reactivaciones de su módulo de lander se retrasaron al 23 por razones no especificadas.[48] Al 28 de septiembre de 2023, el rover todavía no había despertado[49] y desde la ISRO no ha proporcionado actualizaciones. Se presume que el rover Pragyan está muerto.
Rover Pragyan de la India encontró azufre en la región subpolar sur de la Luna
Publicado el 31 agosto, 2023 por Victor Roman
La misión Chandrayaan-3 de India, que aterrizó en la Luna hace apenas una semana, ya ha realizado observaciones científicas significativas en el polo sur lunar. El rover a bordo ha confirmado la presencia de azufre en la región, según anunció la Organización de Investigación Espacial de la India (ISRO).
El rover Pragyan, parte de esta misión, llevó consigo el instrumento LIBS (Espectroscopía de Descomposición Inducida por Láser), que utilizó para analizar el regolito lunar. Este logro es especialmente destacable, pues marca la primera vez que un rover explora esta área en particular.
Mediante el instrumento LIBS, se realizaron las primeras mediciones in situ sobre la composición elemental de la superficie lunar cerca del polo sur. Con ello se ha podido confirmar de manera inequívoca la presencia de azufre, un hito que no se había logrado con los instrumentos de los orbitadores anteriores.
Análisis preliminares sugieren la presencia de elementos adicionales como aluminio, hierro, calcio, cromo y titanio. ISRO también comunicó el hallazgo de trazas de manganeso, silicio y oxígeno. Actualmente, se está investigando a fondo la posible presencia de hidrógeno.
Importancia
Sabemos que las poderosas agencias espaciales de China, Rusia y Estados Unidos ya han realizado alunizajes exitosos. Sin embargo, los intentos previos de llegar al polo sur lunar no habían tenido éxito. Rusia recientemente, y la propia India hace algunos años, sufrieron accidentes durante el aterrizaje en la superficie lunar.
Estados Unidos ya han realizado alunizajes exitosos. Sin embargo, los intentos previos de llegar al polo sur lunar no habían tenido éxito. Rusia recientemente, y la propia India hace algunos años, sufrieron accidentes durante el aterrizaje en la superficie lunar.
Se cree que el polo sur lunar es la zona más rica en agua de la Luna. Por ese motivo, el rover Pragyan se dedicará las próximas dos semanas a buscar signos de agua congelada con su láser. Además, estudiará la atmósfera y determinará la composición exacta del polo sur.
El hallazgo de agua congelada en la superficie lunar tendría un valor incalculable. Se podría utilizar para producir oxígeno respirable en bases lunares y proporcionaría los componentes esenciales para el combustible de cohetes que faciliten misiones a Marte.
El instrumento LIBS a bordo del rover confirma sin ambigüedades la presencia de azufre (S) en la superficie lunar cerca del polo sur, mediante las primeras mediciones in situ. / ISRO
“Sabiduría e inteligencia”
El rover Pragyan, cuyo nombre proviene de la palabra hindú que significa la forma más alta y pura de sabiduría e inteligencia, pesa solo 25.8 kg y tiene el tamaño aproximado de un pastor alemán pequeño. Está equipado no solo con la herramienta LIBS basada en láser, sino también con un haz de partículas alfa.
La técnica LIBS detecta elementos al disparar láseres intensos en la superficie lunar, generando plasma caliente. Luego de estudiar la luz de este plasma, los investigadores pueden identificar las longitudes de onda de diversas partículas en esa sección específica de la Luna.
El rover Pragyan ha hecho lo que se esperaba que hiciera: jefe de ISRO
Sobre el estado de Pragyan, actualmente en modo de suspensión en la luna, el jefe de ISRO dijo que se despertará si sus circuitos electrónicos no han sido dañados debido al clima extremo en la luna, ya que la temperatura cayó casi 200 grados centígrados bajo cero.
28 de septiembre de 2023
Crédito de la foto: ANI
El presidente de la Organización de Investigación Espacial de la India (ISRO), S. Somanath, afirmó el jueves que el rover Pragyan de su misión lunar Chandrayaan-3 ha hecho lo que se esperaba que hiciera y que no sería un problema incluso si no logra “despertar”. ‘desde el modo de suspensión actual .
La agencia espacial nacional se está preparando para el lanzamiento del XPoSat o satélite polarímetro de rayos X, que podría tener lugar en noviembre o diciembre, dijo en una conferencia de prensa aquí después de visitar el famoso templo de Somnath en el distrito Gir Somnath de Gujarat.
Sobre el estado de Pragyan, actualmente en modo de suspensión en la luna , el jefe de ISRO dijo que se despertará si sus circuitos electrónicos no han sido dañados debido al clima extremo en la luna, ya que la temperatura descendió casi 200 grados centígrados bajo cero.
“Está bien si no se despierta porque el rover ha hecho lo que se esperaba que hiciera”, añadió.
ISRO había dicho la semana pasada que al amanecer en la luna, hizo esfuerzos para establecer comunicación con el módulo de aterrizaje Vikram de la misión lunar Chandrayaan-3 y el rover Pragyan para determinar su “condición de despertar” después de haber sido puestos en modo de suspensión a principios de este mes. pero no se recibían señales.
Tanto el módulo de aterrizaje como el rover se pusieron en modo de suspensión los días 4 y 2 de septiembre, antes de la llegada de la noche lunar.

Esta imagen de ISRO traza la trayectoria del rover mientras se movía 100 metros desde el módulo de aterrizaje, en la Luna..
“Misión Chandrayaan-3: el rover completó sus tareas. Ahora está estacionado de manera segura y en modo de suspensión. Las cargas útiles APXS y LIBS están desactivadas. Los datos de estas cargas útiles se transmiten a la Tierra a través del módulo de aterrizaje”, publicó la agencia espacial en X.
La batería está completamente cargada y el panel solar está orientado para recibir la luz en el próximo amanecer previsto para el 22 de septiembre, añadió.
“Actualmente, la batería está completamente cargada. El panel solar está orientado para recibir la luz en el próximo amanecer previsto para el 22 de septiembre de 2023. El receptor se mantiene encendido. ¡Esperando un despertar exitoso para otra serie de tareas! De lo contrario, permanecerá allí para siempre como embajador lunar de la India”, publicó la ISRO.
La NASA encuentra el lugar donde el rover indio Pragyan hiberna
Gracias a una sonda que orbita la Luna, ahora se sabe cómo luce el sitio de alunizaje de la misión Chandrayaan-3.

El punto más iluminado de la composición es el sitio de alunizaje del módulo Vikram, de India./NASA
El vehículo Lunar Reconnaissance Orbiter (LRO) de la NASA detectó el punto ‘Shiv Shakti’, el sitio donde alunizó el módulo Vikram y el rover Pragyan el pasado 23 de agosto. La foto tomada desde un plano cenital permite dimensionar los primeros pasos del vehículo de la India, así como todos los obstáculos por los que atravesará en sus futuras misiones.
La NASA aprovechó el camino del LRO para fotografiar el área del reciente alunizaje. El punto cero de la misión india se percibe como una pequeña circunferencia luminosa que contrasta con la paleta de grises en la composición. De acuerdo con la agencia espacial, la tonalidad surge a partir de la interacción de la columna del cohete del Vikram con el regolito lunar de grano fino.
El punto ‘Shiv Shakti’ se posiciona a 600 kilómetros del polo sur de la Luna. Es lo más cerca que ha estado un vehículo humano de la región. La misión Chandrayaan-3 tenía como objetivo llevar instrumentos de investigación a esa zona hasta ahora inexplorada. Desde su despliegue, el rover Pragyan caminó una centena de metros y usó su instrumento láser para verificar la composición del suelo lunar. Encontró que el sur del satélite contiene azufre, además de los elementos usuales como aluminio, calcio, hierro, cromo, titanio, manganeso, silicio y oxígeno.
En la foto también se alcanza a distinguir el cráter con el que se encontró el Pragyan. La estructura lunar de cuatro metros de diámetro obligó al vehículo a virar para no poner en riesgo su misión. El explorador busca depósitos de hidrógeno en el extremo del satélite con la esperanza de identificar agua congelada.
Ingenuity
Ingenuity
Mars Helicopter Ingenuity
Tipo de misión: Demostración tecnológica
Página web: Mars Helicopter
Duración de la misión: Planeado: 30 días marcianos
Propiedades de la nave
Fabricante: Laboratorio de Propulsión a Reacción
Masa de lanzamiento: 1.8 kilogramos
Comienzo de la misión
Lanzamiento: 30 de julio de 2020, 11:50 UTC
Vehículo: Atlas V

Acercamiento a Marte: Insignia del helicóptero de Marte del JPL
Ingenuity (previamente llamado Mars Helicopter y con anterioridad Mars Helicopter Scout123456) es un helicóptero robótico que forma parte de la misión Mars 2020. Servirá como demostración tecnológica para explorar objetivos interesantes para estudiar en el planeta Marte, y poder planificar la mejor ruta para la misión encomendada principalmente al rover Perseverance que será colocado en el planeta, y a futuros rovers en Marte.78
El pequeño dron será desplegado del rover Perseverance, y se espera que realice hasta 5 vuelos durante los 30 días, que se espera esté en funcionamiento, coincidiendo con la primera parte de la misión del rover, ya que es una demostración tecnológica.9 Realizará hasta un máximo de cinco vuelos, cada uno de ellos durará aproximadamente 3 minutos, alcanzando alturas que oscilan entre 3 y 10 metros sobre el suelo, pudiendo cubrir distancias de aproximadamente 300 metros por vuelo.10 Será totalmente autónomo y se comunicará con el rover Perseverance directamente después de cada aterrizaje.
Si cumple las expectativas, su diseño podría ser la base para futuras misiones similares.10 La directora del proyecto es MiMi Aung.11 Otros miembros del equipo son la empresa AeroVironment Inc., el Centro de Investigación Ames y el Centro de investigación de Langley, ambos de la NASA.12
El primer vuelo lo realiza el día 19 de abril de 2021 a las 11:30 UTC, encontrándose a unos 400 millones de kilómetros de la Tierra.13
Ingenuity se convirtió en el primer vehículo en hacer un vuelo con motor en otro planeta.
Desde el Laboratorio de Propulsión a Reacción (JPL) y el Instituto de Tecnología de California de la NASA estuvieron estudiando el potencial de enviar un robot explorador aéreo para acompañar al rover Perseverance, terminando por hacer público el proyecto del helicóptero en 2014.1214 A mediados de 2016, se solicitaban 15 millones de dólares para continuar con el desarrollo del helicóptero.15 En diciembre de 2017, se probaron algunos modelos proyectados del helicóptero en una atmósfera marciana simulada en el Ártico,1016 sin ser definitiva su inclusión en la misión ni tampoco aprobada ni financiada.17
El presupuesto federal de los Estados Unidos, anunciado en marzo de 2018, proporcionó 23 millones de dólares para el proyecto del helicóptero,1819 el 11 de mayo de 2018 se anunció que era viable el proyecto para desarrollarlo y probarlo con el tiempo justo para ser incluido en la misión Mars 2020.20
El helicóptero fue sometido a extensas pruebas de dinámica de vuelo y medio ambiente,1021 en agosto de 2019 fue montado en la parte inferior del rover Perseverance.22 Su masa es de poco menos de 1,8 kg2123 y realizará hasta 5 vuelos.212420
Objetivos

Ingenuity es un demostrador tecnológico del Laboratorio de Propulsión a Reacción, que evaluará si es factible volar por Marte de manera segura, también proporcionará una cartografía detallada de la zona que brindaría a los futuros controladores de misiones más información, ayudando de esta manera la planificación de futuras rutas y prevención de riesgos, y facilitará la localización de lugares por donde acceder con el rover y su posterior estudio.252627 Asimismo proporcionará imágenes aéreas con aproximadamente diez veces más resolución que las imágenes orbitales, mostrando características que pueden estar ocultas o excluidas por cámaras móviles.28 Se espera que esta exploración permita a los futuros visitantes dirigirse con seguridad hasta tres veces más lejos por día marciano (sol).29
Esta prueba servirá como base sobre la cual se podrán desarrollar otros ingenios más especializados para la exploración aérea de Marte y otros objetivos planetarios con atmósfera.25103031
Diseño
Diagrama de Ingenuity.
– 1 Rotores diseñados para poder volar en la tenue atmósfera de Marte
– 2 Células solares suministran la energía que carga la batería
– 3 Una cámara de alta resolución permite tomar fotos de sitios ubicados a larga distancia del rover
– 4 Una cámara y otros sensores asociados con un ordenador resistente a diversos fallos permiten gran autonomía
– 5 Patas flexibles para un suave aterrizaje, un sistema de visión activa y un altímetro
– 6 El aislamiento térmico tipo aerogel y la resistencia al calor permiten a las baterías para sobrevivir a las noches
– 7 El helicóptero se comunica con el rover en la banda UHF.
| Mars Helicopter Scout |
Unidades/rendimiento2 |
| Masa | Total: 1,8 kg2 Baterías: 273 g 10 |
| Altura | 0,8 m16 |
| Diámetro del rotor coaxial | 1,2 m16 |
| Revoluciones/min | 1.900–2.800 rpm20 |
| Velocidad punta | 36 km/h |
| Dimensión del chasís | 14 cm² |
| Funcionamiento | 220 W (batería, cargada por paneles solares) |
| Tiempo de vuelo | Hasta 90 segundos, una vez al día |
| Tiempo operativo | ~5 vuelos en ~30 días |
| Rango máximo | Vuelo: 300 m10 Radio: 1.000 m10 |
| Altitud máxima | 10 m10 |
| Velocidad máxima12 | Horizontal: 10 m/s Vertical: 3 m/s |
| 2 cámaras | Imágenes a color en alta resolución Navegación16 |
El helicóptero utiliza rotores coaxiales contrarrotativos de aproximadamente 1,1 m de diámetro. Su carga útil consiste en una cámara de alta resolución con el objetivo apuntando hacia abajo para inspeccionar el suelo y así detectar por dónde se desplaza y poder aterrizar con seguridad posteriormente, también lleva un sistema de comunicación para transmitir datos al rover Perserverance.3233 Aunque se desplaza como un avión, se construyó como una nave espacial que pudiese soportar la fuerza g y las vibraciones durante el lanzamiento. Sus sistemas están fabricados de manera que son resistentes a la radiación y son capaces de operar en un ambiente helado como en ciertas partes de Marte.
El inconsistente campo magnético de Marte impide el uso de brújulas para la navegación, por lo que utilizará una cámara de seguimiento solar integrada al sistema de navegación inercial del JPL. Posee elementos adicionales como giroscopios, odometría visual, sensores de inclinación, altímetro y detectores de peligro.34 Utilizará paneles solares para recargar sus baterías, que son seis celdas de iones de litio de Sony con una capacidad de placa de 2 Ah.10
El prototipo utiliza el procesador Snapdragon de Intrinsyc con un sistema operativo Linux, que también implementa la navegación visual con velocidad estimada derivada de las funciones rastreadas con una cámara. El procesador Qualcomm está conectado a dos unidades microcontroladoras de control de vuelo (MCU) para realizar las funciones de control de vuelo necesarias. Las comunicaciones con el rover se realizan mediante un enlace de radio llamado Zigbee, un chipset estándar de 900 MHz que va montado tanto en el rover como en el helicóptero. El sistema de comunicación fue diseñado para transmitir datos a 250 kbit/s en distancias de hasta 1.000 m.10
Viajó a Marte unido a la parte inferior del rover Perseverance, y se desplegará en la superficie entre 60 y 90 días marcianos tras el aterrizaje. Después, el rover se desplazará 100 m de distancia aproximadamente para que comiencen los vuelos de prueba.353637
Futuro
Esta demostración tecnológica servirá como base sobre la cual se podrán desarrollar helicópteros o ingenios más preparados para misiones más ambiciosas en planetas y lunas con atmósfera.1030 La próxima generación de helicópteros estará en el rango de entre 5 y 15 kg con cargas útiles científicas de entre 0,5 y 1,5 kg. Estas potenciales aeronaves podrán tener comunicación directa con un orbitador y pueden o no continuar trabajando con un objetivo en tierra.36 La siguiente generación de helicópteros podrán utilizarse para explorar regiones con particulares características como que tengan hielo de agua o salmueras donde la vida microbiana del terreno pudiera sobrevivir.
Los helicópteros de Marte también podrán estar preparados para la recuperación rápida de pequeñas cápsulas de muestras para un futuro regreso a un vehículo ascendente de Marte para vuelta a la Tierra.10
Galería
Ingenuity
Drone Ingenuity alimentado con energía solar para ser probado como ayuda para la navegación

Ingenuity
Reproducir contenido multimedia
Animación del Ingenuity (1:07 de duración; 29 de abril de 2020)

Acoplamiento al rover Perseverance (2019)

Acoplamiento de Ingenuity a la parte inferior del rover.
Miembros del equipo de Ingenuity

Reajustando a Ingenuity
Operaciones en Marte
Inicio de separación con el rover Perseverance.


Vertical
Separación completa

Desbloqueo de las aspas

Sombra de Ingenuity durante su primer vuelo
El Ingenuity pesa 1,8 kilogramos en la Tierra, o 0,68 kg en Marte por la menor gravedad de ese planeta.
Su altura es de 0,49 metros, con dos rotores contrarrotatorios de 1,2 metros de longitud que girarán a unas 2.400 rpm. Sobre estos se encuentra la placa de células solares usadas para recargar las seis baterías de ion-litio que aportan la electricidad precisa. La caja que forma el fuselaje y que incluye los sistemas del Ingenuity mide 13,6 x 19,5 x 16.3 cm, y se apoya sobre cuatro patas fabricadas en fibra de carbono de 38,4 cm de longitud. Con ellas, la parte baja del fuselaje queda a 13 cm del suelo.
El Ingenuity lleva además un pequeño fragmento del entelado original del Flyer con el que los hermanos Wright hicieron su primer vuelo el 17 de diciembre de 1903.
El pequeño rectángulo blanco es el trozo de entelado del avión de los hermanos Wright.

Foto del Ingenuity tomada por el rover Perseverance tras depositarlo sobre el terreno marciano.
Se puede ver un log de cada uno de sus vuelos aquí
Como se comprueba en la lectura de este artículo, se superaron con creces las previsiones de: vuelos, desplazamientos, supervivencia, duración, etc.
Tras retrasar un par de días el vuelo en Marte del helicóptero Ingenuity, la NASA decidió posponerlo de nuevo, al menos una semana. Inicialmente el primer vuelo se programó para el domingo 11 de abril, pero el día anterior se decidió el aplazamiento. Después se reprogramó para el miércoles, pero de nuevo se decidió retrasarlo “al menos hasta la próxima semana”. Tras haber sido depositado en el suelo marciano por el rover Perseverance, la NASA realizó diversas pruebas funcionales del Ingenuity, incluyendo hacer girar los rotores del mismo. Se revisaron y arreglaron los problemas de software que impedían su buen funcionamiento.
El primer vuelo de Ingenuity en Marte fue el pasado 19 de abril y duró menos de un minuto. Eso sí, fue un vuelo histórico. La NASA ha hecho historia este lunes al completar con éxito el primer vuelo controlado y con motor de una aeronave en otro planeta. El helicóptero Ingenuity, que se desprendió del ‘rover’ Perseverance hace unas semanas, ha d espegado de la superficie de Marte en torno a las 10:00 (hora española), pero no ha sido hasta nuestras 13:00 cuando los datos han llegado a la Tierra y el equipo del Jet Propulsion Laboratory (JPL) de Los Ángeles ha estallado en júbilo detrás de las mascarillas. Este primer vuelo en Marte tuvo una duración de 39,1 segundos y el pequeño dron no se desplazó horizontalmente, aunque alcanzó una altura de unos 3 metros y giró sobre sí mismo 90º.
espegado de la superficie de Marte en torno a las 10:00 (hora española), pero no ha sido hasta nuestras 13:00 cuando los datos han llegado a la Tierra y el equipo del Jet Propulsion Laboratory (JPL) de Los Ángeles ha estallado en júbilo detrás de las mascarillas. Este primer vuelo en Marte tuvo una duración de 39,1 segundos y el pequeño dron no se desplazó horizontalmente, aunque alcanzó una altura de unos 3 metros y giró sobre sí mismo 90º.
El segundo vuelo se produjo apenas unos días después, el 22 de abril, y consistió en un vuelo de apenas 51,9 segundos y se elevó 5 metros. Tras levantarse, a las 11.30 hora española, se inclinó ligeramente para desplazarse de manera lateral dos metros. Después, se detuvo, giró y retrocedió esos dos metros. Y aterrizó sin ningún tipo de problema. A pesar de la brevedad, todo salió según lo esperado por la NASA y el Laboratorio de Propulsión a Chorro (JPL, por sus siglas en inglés).
El tercero vuelo ha sido durante la madrugada del domingo, 25 de abril. En un vídeo de la NASA y el JPL se puede ver a Ingenuity elevarse del suelo algo más de tres metros, según los expertos de la misión. Y recorrer 50 metros hacia delante. La velocidad máxima en este vuelo fue de 2 m/s (7,2 km/h), Llega a salir de cámara durante un rato, pero luego vuelve para su lugar de origen y aterriza.
El cuarto vuelo sufrió una modificación: 29/04/2021 – 23:42 El mini helicóptero de la NASA Ingenuity en Marte Handout NASA/JPL-Caltech/MSSS/ASU/AFP. Washington (AFP). El helicóptero Ingenuity de la NASA no pudo realizar este jueves su cuarto vuelo programado en Marte por un error de software, informó la agencia espacial estadounidense, que prometió volver a intentarlo al día siguiente. El 30.04.2021 Ingenuity completa con éxito su cuarto vuelo en Marte y comienza una nueva misión de exploración. El helicóptero se alejó 133 metros a 5 metros de altura y luego regresó, desplazándose un total de 266 metros. Además, estuvo un total de 117 segundos en el aire, superando el límite de 90 segundos que el equipo se había autoimpuesto antes del lanzamiento. Ahora la NASA tiene preparada para la aeronave un nuevo objetivo: demostrar las operaciones de vuelo que las futuras naves aéreas podrían utilizar.
En vista de los resultados se propuso que el helicóptero realizase hasta un sexto vuelo, durante un mes adicional de trabajo. Si después del mes adicional Ingenuity sigue funcionando, se podrá prorrogar su vida útil en plazos de un mes, pero solo hasta agosto.
El quinto vuelo fue el 08/05/2021 – El helicóptero Ingenuity de la NASA en Marte ha realizado su primer vuelo de ida desde el aeródromo que ha usado en sus primeros vuelos hasta un nuevo emplazamiento a 129 metros al sur en el cráter Jezero. En su quinto vuelo en el Planeta Rojo, Ingenuity se desplazó a la vertical de su nuevo emplazamiento, subió a un récord de altitud de 10 metros y capturó imágenes en color de alta resolución de la zona antes de aterrizar.
El sexto vuelo fuel el 28/05/2021 – Fue un éxito, pero con algunos problemas. Pese a que la aeronave empezó a experimentar problemas de «sincronización«, con cambios de velocidad, y movimientos de balanceo y cabeceo, varios subsistemas (el sistema de rotor, los actuadores y el sistema de energía) respondieron de forma que el helicóptero se mantuvo volando hasta aterrizar de manera segura.
El séptimo vuelo. El helicóptero Ingenuity de la NASA completaba su séptimo vuelo en Marte el 8 de junio de 2021. Durante él se desplazó 106 metros en dirección sur. Y fue un vuelo absolutamente nominal. Lo que quiere decir que fue un vuelo aburrido. Si es que se puede decir que hacer volar un cacharro a motor en Marte es aburrido, claro. Esto supone una bienvenida diferencia respecto al sexto vuelo, en el que un error en la captura de imágenes de la cámara de navegación dio un buen susto al provocar grandes oscilaciones en el vuelo de Ingenuity.
El octavo vuelo. El helicóptero Ingenuity de la NASA en Marte ha completado con éxito su octavo vuelo este 22 de junio de 2021, capturando su propia sombra en esta imagen. Voló por el cráter Jezero durante 77,4 segundos y viajó 160 metros hasta un nuevo punto de aterrizaje a unos 133,5 metros de distancia del rover Perseverance. Por otra parte, el rover Perseverance ha captado una secuencia de imágenes que muestran cómo el viento arrastra el el polvo en la superficie del cráter Jezero.
En su noveno vuelo, el helicóptero Inge nuity, muestra un terreno intrigante en Marte. El noveno vuelo del dron (05/07/2021) capturó imágenes que ayudarán al equipo del rover Perseverance a planificar su trabajo científico. No sólo ha batido todos los récords de distancia y duración del vuelo –625 metros y 2 minutos y 46 segundos en el aire– sino que además ha validado la idea de que un dispositivo de este tipo puede actuar como explorador para un rover y permitirnos ver sitios a los que el vehículo terrestre no puede llegar. Y es que Ingenuity ha sobrevolado un campo de dunas que está en una zona bautizada como Séítah que Perseverance está evitando cuidadosamente porque nadie quiere que se quede atascado allí.
nuity, muestra un terreno intrigante en Marte. El noveno vuelo del dron (05/07/2021) capturó imágenes que ayudarán al equipo del rover Perseverance a planificar su trabajo científico. No sólo ha batido todos los récords de distancia y duración del vuelo –625 metros y 2 minutos y 46 segundos en el aire– sino que además ha validado la idea de que un dispositivo de este tipo puede actuar como explorador para un rover y permitirnos ver sitios a los que el vehículo terrestre no puede llegar. Y es que Ingenuity ha sobrevolado un campo de dunas que está en una zona bautizada como Séítah que Perseverance está evitando cuidadosamente porque nadie quiere que se quede atascado allí.
En su décimo vuelo. Ingenuity, el helicóptero que acompaña a Perseverance en Marte, ha realizado su décimo vuelo la madrugada del 25 de julio. Ahora ha marcado un hito que la agencia espacial no esperaba; pero que demuestra que Ingenuity todavía tiene mucho que aportar a la exploración en Marte. Con cada nuevo vuelo, la NASA ha tratado de ir probando los límites de Ingenuity a la par que miraba desde el cielo la superficie de Marte, según han explicado en Business Insider. En este décimo vuelo, el pequeño helicóptero se alzó hasta los 12 metros y voló hasta un conjunto de rocas conocido como Raised Ridges. Este nuevo vuelo, además, marcó otro nuevo hito en la vida de Ingenuity en Marte. Y es que el pequeño helicóptero ha completado ya su primera milla (1,6 kilómetros) de recorrido en el cielo del planeta vecino.
Su undécimo vuelo. Washington, 6 ago. El helicóptero Ingenuity culminó con éxito su undécimo vuelo de 130,9 segundos en los que recorrió unos 380 metros en el cráter Jezero del planeta Marte, anunció hoy la NASA. (4 agosto de 2021). De acuerdo con un mensaje en Twitter de la Administración Nacional de Aeronáutica y el Espacio de Estados Unidos (NASA), la aeronave aterrizó en un lugar donde vuelos de reconocimiento con imágenes aéreas ayudarán al rover Perseverance en su búsqueda de vida microbiana ancestral en dicho mundo. La nueva base de operaciones, que se encuentra aproximadamente a 385 metros al noroeste de la ubicación anterior en el conocido planeta rojo se convertirá en el área de preparación para al menos un vuelo de reconocimiento de un área geológicamente desconocida denominada Sur de Seitah.
Su duodécimo vuelo. Realizado el 19 Agosto 2021. El helicóptero Ingenuity de la NASA ha completado con éxito su vuelo número 12 en Marte. Este último vuelo ha sido además uno de los más ambiciosos y peligrosos: Ingenuity abandonaba el vuelo sobre la planicie y se adentraba en un paisaje con desniveles, algo que podría haber sido un problema para sus sensores. No lo fue, y Ingenuity sigue haciendo historia. Ingenuity explora desde el aire para chivarle los datos a Perseverance. En el JPL de la NASA explicaban como Ingenuity ha comenzado a explorar la región ‘South Séítah’. Para ello realizó un vuelo con una altura de 10 metros, y se desplazó cerca de 450 metros durante los 169 segundos que se mantuvo en el aire.
Su decimotercero vuelo. Realizado el 6 Septiembre 2021. Ingenuity realiza el vuelo más bajo y lento en Marte, consiguiendo así fotografías más detalladas del suelo marciano. La idea de esto es combinar las imágenes de ambos vuelos para realizar una mapeado 3D de la zona con más detalles topográficos. Con ello podrán planear mejor también qué hacer en el futuro con el rover Perseverance y por dónde dirigirlo a explorar. Otro detalle interesante es el tiempo del vuelo. O, más específicamente, la velocidad de vuelo. Mientras que en el vuelo número 12 la distancia fue de aproximadamente 450 metros, en esta ocasión la distancia ha sido apenas de 210 metros. Sin embargo, el tiempo de vuelo ha sido aproximadamente el mismo, un total de 161 segundos frente a los 169 segundos del vuelo número 12.
Ingenuity concluye con éxito décimocuarto vuelo en Marte. October 27, 2021. El helicóptero Mars Ingenuity de la NASA se recupera después de una anomalía en el vuelo 14. El helicóptero Ingenuity detectó su propia sombra durante su breve vuelo número 14. El 30/09/2021, el helicóptero Ingenuity de la NASA en Marte canceló su vuelo número 14 tras detectar una anomalía en algunos de los pequeños motores que rigen las palas que hacen volar la aeronave. El helicóptero originalmente iba a intentar su decimocuarto vuelo antes de la conjunción solar de Marte, pero una anomalía le impidió despegar. El exitoso salto posterior a la conjunción sugiere que Ingenuity está en buena forma y listo para continuar su misión pionera.
Ingenuity concluye con éxito décimoquinto vuelo en Marte. 10/11/2021. Y después del decimoquinto vuelo, el cual fue un poco más corto de lo que la NASA tenía planeado (130 segundos y 400 metros), el Ingenuity ya vuelve al lugar donde emprendió su primer vuelo, es decir, su punto de partida. El objetivo final de este helicóptero no es solo extraer minerales del planeta rojo sino también explorar y ver esas zonas a las que el Perseverance no puede llegar. Para hacer ver la evolución de los vuelos del Ingenuity, el primero tan solo fue un vuelo estacional de 3 metros de altura y 40 segundos que cada vez han ido complicando más y más con cada vuelo. Así hasta llegar al 14º, en el que el pequeño helicóptero voló a 2700 rpm, lo cual demuestra que podrá volar sin complicaciones cuando el clima en Marte sea mucho más frío y el aire más fino.
Ingenuity concluye con éxito décimosexto vuelo en Marte. 20/11/2021. Vuelo dieciséis: 20 de noviembre de 2021 viajando 381 pies (116 m) por un total de 108 segundos a un estimado de 3 mph. Durante este vuelo hacia el NE, sobrevoló Raised Ridges y luego aterrizó cerca de Séítah Sud.
Ingenuity concluye con éxito décimoseptimo vuelo en Marte. 05/12/2021. Ingenuity vuela de nuevo sobre Marte: ya lleva 17 trayectos, aunque este último ha dado un pequeño susto. La comunicación entre Ingenuity y el rover Perseverance se interrumpió mientras el helicóptero descendía. Todos datos de la telemetría han indicado posteriormente que el vuelo se completó con éxito, y la NASA ha explicado cuál pudo ser la causa de esa pérdida momentánea del enlace entre ambos vehículos. Hubo dos factores que pudieron causar el problema. El primero, el terreno: al descender, Ingenuity pudo acabar tras una pequeña colina de cuatro metros de altura que el equipo ha denominado ‘Bras’. El segundo, la orientación del rover, que cambió debido a nuevos objetivos para su exploración científica. “En el momento en el que el Vuelo 17 estuvo preparado para su ejecución, Perseverance había ido a otra nueva ubicación y había aparcado en una orientación compleja para las comunicaciones de radio”. Los últimos datos revelan que Ingenuity está en perfecto estado.Con un peso de 1,8 kilogramos, este helicóptero superó todas las expectativas iniciales, y ya ha recorrido una distancia equivalente a 3.592 metros, volando tan alto como 12 metros y tan rápido como 5 metros por segundo. El recorrido de 117 segundos, del 5 de diciembre, le valió al helicóptero en Marte el récord de 30 minutos y 48 segundos, una cifra que superará con sus próximos vuelos. Durante este último recorrido, la nave se acercó a su aeródromo original, “Wright Brothers Field”,
Ingenuity concluye con éxito décimoctavo vuelo en Marte. 17/12/2021. La NASA anunció este viernes que su helicóptero Ingenuity completó con éxito su 18° vuelo sobre Marte. El recorrido fue de 230 metros, a una velocidad de 2,5 metros por segundo, y tuvo una duración de 124,3 segundos. Al igual que con el vuelo anterior, el 18 ampliará los límites del alcance y el rendimiento de radio de Ingenuity. Para brindarle la mejor oportunidad de mantener un enlace durante el aterrizaje, el equipo de Mars Helicopter ha modificado la secuencia de vuelo para comunicarse en un modo de baja velocidad de datos, lo que proporcionará un impulso adicional en la intensidad de la señal al enlace de radio.
Ingenuity concluye con éxito décimonoveno vuelo en Marte. 09/02/2022. Ingenuity vuela en Marte por primera vez este año 2022.Primera vez este año y la decimonovena desde que está en Marte. El helicóptero Ingenuity de la NASA en Marte, primera aeronave a motor de operación controlada en otro mundo, ha permanecido en el aire durante más de minuto y medio y cubriendo unos 62 metros durante su vuelo. Tras más de un mes de retraso debido al polvo en el ambiente. Tal y como estaba previsto, el vuelo sacó a Ingenuity de una zona accidentada del suelo de Jezero conocida como South Séítah, sobre una cresta y hacia una meseta. Ingenuity permaneció en el aire durante 99,98 segundos y cubrió unos 62 metros durante su singladura. (Fuente: NASA)
Ingenuity concluye con éxito vigésimo vuelo en Marte. 25/02/2022. Hace unos días el helicóptero Ingenuity completaba su vuelo número 20 en Marte. En él recorrió 391 metros a una velocidad de 4,4 metros por segundo. En total duró 130,3 segundos. Anteriormente una tormenta de arena ensució su cámara, algo que podía complicar las cosas y confundir los sensores de navegación, pero la NASA ya había previsto algo así y su software es capaz de ignorar ciertas regiones de las imágenes que se capturan. Tanto Ingenuity como Perseverance están volviendo hacia el punto de aterrizaje de ambos tras haber pasado casi un año explorando una zona al sur. Su nuevo objetivo está al noroeste.
Ingenuity concluye con éxito vigésimoprimer vuelo en Marte. 16/03/2022. El JPL ha anunciado que el Ingenuity ha realizado su 21 vuelo en el planeta rojo, recorriendo 370 metros durante el vuelo de 129 segundos de duración. El helicóptero ya ha recorrido más de 4,6 kilómetros desde su primer vuelo en abril de 2021. El Ingenuity se desarrolló con el plan original de no usarse en más de cinco vuelos en un solo mes, sin embargo, dado el buen rendimiento que está proporcionando, la misión se ha ampliado, y ahora se utiliza también como explorador para examinar el terreno por el que el rover Perseverance debe pasar. El ingeniero Matt Golombek aclara que el propio helicóptero no ha mostrado signos de desgaste tras casi un año de vuelo en Marte, y que está, “como nuevo”. El helicóptero, que utiliza energía solar, tampoco tiene consumibles que limiten su vida útil. “No hay nada consumible ni nada que nos impida seguir operando mientras el helicóptero se mantenga sano.” La NASA ha anunciado que la misión de Ingenuity va a ser extendida hasta septiembre de 2022.
Ingenuity concluye con éxito su vigésimosegundo vuelo en Marte. 20/03/2022. El Ingenuity, que pesa 1,8 kilogramos, se mantuvo en el aire durante 101,4 segundos y alcanzó una altura máxima de 10 metros durante la salida, que tuvo lugar el domingo (20 de marzo), según un tweet publicado el lunes (21 de marzo) por el Jet Propulsion Laboratory (JPL) de la NASA en el sur de California, que gestiona la misión del Ingenuity. Los responsables del rover están dirigiendo actualmente a Perseverance hacia una parte accesible del antiguo delta, y las observaciones de Ingenuity les están ayudando a elegir la mejor ruta, han dicho los miembros del equipo de la misión.
Ingenuity concluye con éxito su vigésimotercer vuelo en Marte. 25/03/2022. La NASA ha celebrado el logro avisando de cómo esta nueva incursión ha hecho que Ingenuity vuele durante 129 segundos y recorra 358 metros para explorar el cráter Jezero, que será la siguiente zona a la que el rover Perseverance se dirigirá para continuar sus experimentos científicos. Hace semanas que los vuelos de Ingenuity están dirigidos a ayudar a la NASA a tener muchos más detalles de la superficie marciana y de cuál puede ser el mejor camino para que Perseverance llegue a esa zona. El anuncio insinuó que el vehículo robótico se dirigirá pronto a otra región marciana con la esperanza de buscar rastros de la historia. Aparte de eso, se vio que la estructura geológica de esta tierra era un lugar perfecto para la vida emergente. Esto hizo pensar a los expertos que esta región en particular fue una vez un lugar de residencia para cualquier señal de vida.
Ingenuity concluye con éxito su vigésimocuarto vuelo en Marte. 03/04/2022. En el vuelo 24 del 3 de abril de 2022, los rotores de Ingenuity volvieron a girar a 2500 rpm ahora que el aire poco denso del verano local deja paso al aire más denso del otoño —y, de paso, es posible realizar vuelos más prolongados, puesto que los motores no se calientan tan rápidamente—,
Ingenuity concluye con éxito su vigésimoquinto vuelo en Marte. 08/04/2022. En el vuelo 25 del 8 de abril (sol 403), el helicóptero recorrió 704 metros hasta el Aeródromo Q, a una velocidad de 5,5 metros por segundo, la distancia más larga cubierta hasta el ahora. En los próximos meses, Ingenuity ayudará a Perseverance en el estudio del delta de Jezero y se espera que sus datos sirvan para decidir cuál de los dos canales del delta es el ideal para que el rover suba desde el fondo del cráter. Para ello, un nuevo software le permitirá volar hasta los 15 metros de altitud. Hace un año nadie hubiese previsto que Ingenuity fuera capaz de aguantar tanto tiempo en Marte. Ahora, por el contrario, nadie duda de que seguirá activo mucho tiempo. La cámara de navegación ha sido programada para desactivarse siempre que el helicóptero se encuentre a 1 metro de la superficie. Esto ayuda a garantizar que el polvo levantado durante el despegue y el aterrizaje no interfiera con el sistema de navegación mientras rastrea las características en el suelo.
Ingenuity concluye con éxito su vigésimosexto vuelo en Marte. 19/04/2022. Aterrizar en Marte es muy complicado porque el planeta rojo tiene atmósfera, lo que implica que debes usar un escudo térmico para proteger tu nave y, de paso, puedes usar un paracaídas. Pero esta atmósfera es muy poco densa —menos del 1% de la terrestre—, por lo que no es posible frenar una nave para que realice un aterrizaje suave empleando paracaídas exclusivamente y hay que recurrir a otro s medios —retrocohetes o airbags—. Pero, ¿qué pasaría si solo empleamos paracaídas? ¿Cómo quedaría una sonda espacial? Pues ya podemos dejar de imaginar, porque el 19 de abril el helicóptero marciano Ingenuity sobrevoló durante su 26º vuelo el paracaídas y el escudo térmico trasero —backshell— de la cápsula que lo llevó, junto al rover Perseverance, a la superficie marciana. El escudo térmico trasero y el paracaídas, acabaron en el suelo del cráter Jezero el 18 de febrero de 2021 y, desde entonces, allí han permanecido inmóviles, aunque el paracaídas se ha movido ligeramente debido a la débil brisa marciana.
s medios —retrocohetes o airbags—. Pero, ¿qué pasaría si solo empleamos paracaídas? ¿Cómo quedaría una sonda espacial? Pues ya podemos dejar de imaginar, porque el 19 de abril el helicóptero marciano Ingenuity sobrevoló durante su 26º vuelo el paracaídas y el escudo térmico trasero —backshell— de la cápsula que lo llevó, junto al rover Perseverance, a la superficie marciana. El escudo térmico trasero y el paracaídas, acabaron en el suelo del cráter Jezero el 18 de febrero de 2021 y, desde entonces, allí han permanecido inmóviles, aunque el paracaídas se ha movido ligeramente debido a la débil brisa marciana.
Restos alienígenas en Marte: el escudo térmico trasero y el paracaídas de Mars 2020 vistos por Ingenuity 19 de abril de 2022 (NASA/JPL-Caltech).
Ingenuity concluye con éxito su vigésimoseptimo vuelo en Marte. 23/04/2022. Intrigante descubrimiento del Ingenuity en Marte. El dron de la NASA en el planeta rojo capta unas imágenes que muestran rocas inclinadas poco comunes. El hallazgo puede ayudar a conocer la historia del cráter de Jezero. El helicóptero Ingenuity de la NASA en Marte ha inspeccionado una intrigante cresta cerca del antiguo delta fluvial en el cráter Jezero. El sistema ha captado imágenes de un escarpe (pendiente o inclinación muy pronunciada de un terreno), una característica geológica de interés porque los datos recopilados desde la órbita y a distancia por Perseverance indican que es el límite entre las dos principales unidades rocosas en el suelo del cráter. Las imágenes, capturadas el 23 de abril, durante el vuelo 27 del pequeño helicóptero, se tomaron a petición del equipo científico del rover Perseverance Mars, que quería ver más de cerca el afloramiento inclinado. Ingenuity “no solo proporciona imágenes desde una perspectiva aérea, sino que permite a nuestro equipo estar en dos lugares a la vez en Marte”, dijo en un comunicado Ken Farley de Caltech, cient ífico del proyecto de Perseverance.
ífico del proyecto de Perseverance.
Ingenuity concluye con éxito su vigésimooctavo vuelo en Marte. 29/04/2022. El Vuelo 28, un vuelo de 400 metros que duró dos minutos y medio. Ahora la NASA se pregunta si será la última. Luego, la NASA hizo algo inusual: ordenó a los diligentes controladores de la misión que pasaran la mayor parte del 5 de mayo escuchando las señales del helicóptero. Ingenuity vuela de forma autónoma, ya que es imposible pilotarlo en tiempo real porque aunque viajan a la velocidad de la luz las órdenes tardarían, en el mejor de los casos, 3 minutos en llegar a Marte desde la Tierra. En el peor –cuando Marte está más lejos– hasta 22 y medio. Y de media 12 minutos y medio. Así que desde el control de la misión le indican hacia dónde volar, durante cuanto tiempo, y a qué velocidad. Y su sistema de control y guiado –de código abierto– lleva a cabo el vuelo, escogiendo un lugar de aterrizaje adecuado gracias al análisis que hace en tiempo real del suelo sobre el que está. No está nada mal para estar fabricado con hardware comercial que te puedes comprar casi en cualquier tienda.
Ingenuity concluye con éxito su vigésimonoveno vuelo en Marte. 27/05/2022. Ingenuity logra nuevo récord de vuelo en la superficie de Marte. El dispositivo alcanzó el vuelo más rápido y el más lejano desde que fue lanzado a la órbita espacial el pasado 30 de julio de 2020. De acuerdo a lo informado por la NASA, este artefacto logró una velocidad de 5.5 metros por segundo en los que cubrió una distancia de 704 metros. Así las cosas, alcanzó el vuelo más rápido y el más lejano desde que fue lanzado a la órbita espacial el pasado 30 de julio de 2020. “Para nuestro vuelo sin precedentes, la cámara de navegación que mira hacia abajo de Ingenuity nos brindó una sensación impresionante de lo que se sentiría al deslizarse a 10 metros sobre la superficie de Marte a 19 kilómetros por hora“, manifestó Teddy Tzanetos, líder del equipo de Ingenuity. Una vez se puso en marcha, partió hacia el suroeste. Allí pasa por unas ondas de arena, después pasa por un grupo de rocas marcianas y termina captando imágenes de un terreno llano. El video tuvo una duración de 161.3 segundos; sin emba rgo, tras acelerarlo cinco veces el tiempo final fue de 35 segundos. “Ingenuity primero vuela sobre un grupo de ondas de arena y luego sobre varios campos de rocas. Finalmente, debajo aparece un terreno relativamente llano y sin rasgos distintivos, lo que proporciona un buen lugar para aterrizar”, señala la agencia. (Puede leer: Así se escuchan los nuevos sonidos en Marte que descubrió el Perseverance). Los datos en tiempo real de Ingenuity son enviados por los sensores que están a bordo, y la cámara de navegación, una unidad de medición inercial y un telémetro láser guían al helicóptero en el vuelo, haciendo que el helicóptero reaccione al paisaje mientras ejecuta sus comandos.
rgo, tras acelerarlo cinco veces el tiempo final fue de 35 segundos. “Ingenuity primero vuela sobre un grupo de ondas de arena y luego sobre varios campos de rocas. Finalmente, debajo aparece un terreno relativamente llano y sin rasgos distintivos, lo que proporciona un buen lugar para aterrizar”, señala la agencia. (Puede leer: Así se escuchan los nuevos sonidos en Marte que descubrió el Perseverance). Los datos en tiempo real de Ingenuity son enviados por los sensores que están a bordo, y la cámara de navegación, una unidad de medición inercial y un telémetro láser guían al helicóptero en el vuelo, haciendo que el helicóptero reaccione al paisaje mientras ejecuta sus comandos.
Restos de una manta térmica, fotografiados el 15/06/2022, a 2 km. del lugar de aterrizaje.
La NASA le da vacaciones de invierno al helicóptero Ingenuity 14 de Julio de 2022. Ingenuity sobre Marte. Se ven las rodadas de Perseverance tras apartarse de él – NASA/JPL-Caltech. La NASA acaba de anunciar que Ingenuity no volverá a volar hasta principios de agosto. El motivo es que en la mitad de Marte en la que está el pequeño helicóptero es invierno y cada vez hay menos horas de luz y más polvo en la atmósfera. Esto dificulta el trabajo del panel solar que tiene que cargar sus baterías. Así que han decidido darle vacaciones en lo que a la campaña de vuelos se refiere hasta que pase lo peor del invierno. Eso permitirá concentrar la electricidad que produzca el panel en los calentadores que le permitirán sobrevivir al frío. Para evitar que se acumule demasiado polvo en el panel, activará sus rotores de vez en cuando para que las vibraciones lo limpien.
Ingenuity concluye con éxito trigésimo vuelo en Marte. 20/08/2022. Tras casi darlo por perdido, Ingenuity realiza su vuelo número 30 en Marte con éxito. Ingenuity sigue batiendo récords a pesar de casi perderse en mayo. Tras una necesaria hibernación, ha podido realizar un vuelo corto.
Ingenuity vuelve del mundo de los sueños
Afortunadamente el plan parece haber funcionado y el pasado día 20 el helicóptero hacía su vuelo número 30. Fue un vuelo corto y sencillo en el que se elevó cinco metros, se desplazó dos, y volvió a aterrizar a los 33,3 segundos. Está muy por debajo de su vuelo 25, en el que estableció récords de distancia y duración con 704 metros y 161,3 segundos Pero demuestra que todo a bordo funciona correctamente. Así que en las próximas semanas, según vaya mejorando la meteorología, Ingenuity irá haciendo vuelos cada vez más largos en su función de explorador avanzado para el rover Perseverance. El vuelo número 30 de Ingenuity se ha llevado a cabo con dos objetivos. Por un lado, mover el helicóptero para que se active y libere parte del polvo que se ha acumulado sobre él en estos dos meses de letargo. Es un problema que se acumule mucho polvo, ya que puede afectar a su electrónica y, además, interfiere en la capacidad de sus placas solares para tomar las radiaciones solares. Por otro lado, se ha llevado a cabo un vuelo de salto corto, que serán los que se realicen mayoritariamente cuando se envíen más helicópteros como él a Marte. El objetivo es que transporten hasta la nave las muestras extraídas por los rover que tendrán que enviarse de nuevo a la Tierra. Para ello, no se necesitan vuelos largos y un ensayo como este es más que suficiente. Es cierto que no podría haber sido más larga, pues sus baterías solares apenas pueden cargarse un poco durante el día. No debemos olvidar que aún se están alcanzando en Marte temperaturas de hasta -86ºC por la noche. Pero tampoco se necesitaba nada más.
Ingenuity concluye con éxito trigésimo primer vuelo en Marte. 06/09/2022. El helicóptero de Marte de la NASA realiza su vuelo más largo. El Ingenuity completó su vuelo número 31 en el planeta rojo el 6 de septiembre, informó el miércoles el Laboratorio de Propulsión a Chorro (JPL), que supervisa la actual misión a Marte. El helicóptero, viajó durante 319 pies (97,2 metros) a una altitud de 33 pies (10 metros), dijo JPL en un tweet. La agencia aún no ha comentado con más detalle sobre el vuelo. La salida del martes fue la segunda desde el 11 de junio, después de lo cual el equipo de la misión dejó en tierra a Ingenuity debido a un aumento en las tormentas de polvo y las temperaturas estacionales amargamente frías. Ingenuity se dirige al delta del río dentro del cráter Jezero, donde se reunirá con el rover Perseverance, que continúa su misión de recolectar muestras de suelo marciano para regresar a la Tierra para que los científicos puedan estudiar el material en busca de evidencia de vida microbiana antigua en el planeta distante. El helicóptero ha estado ayudando utilizando su cámara a bordo para obtener imágenes de áreas de interés para que el equipo pueda ver si vale la pena enviar a Perseverance para una mirada más cercana. También está mapeando el terreno, lo que permite a los controladores usar los datos para crear las rutas más seguras para que Perseverance las tome. El ingenio se ha desempeñado tan bien que la NASA anunció recientemente que tiene la intención de construir versiones más avanzadas de la máquina voladora similar a un dron para futuras misiones planetarias.
Ingenuity concluye con éxito trigésimo segundo vuelo en Marte. 17/09/2022. Ingenuity completó su vuelo número 32 sobre la superficie de Marte. El vuelo duró 55 segundos. La imagen fue tomada con su cámara de navegación. En la esquina superior derecha se ve una de sus patas y en la esquina inferior izquierda su sombra.
Ingenuity concluye con éxito trigésimo tercer vuelo en Marte. 24/09/2022. Misteriosas imágenes del vuelo 33 de Ingenuity revelan un objeto extraño; la NASA investiga qué es. La aeronave viajó unos 111 m antes de aterrizar, y su vuelo duró poco más de 55 segundos.
4 octubre, 2022. ¿De qué se trata este extraño objeto en Marte? Lo captan en video | Foto: NASA. Durante el vuelo 33, la cámara de navegación del Ingenuity Mars Helicopter de la Administración Nacional de Aeronáutica y el Espacio (NASA) capturó imágenes en las que se aprecia una pequeña pieza de escombro de objetos extraños (FOD). El hallazgo quedó registrado en video.
De acuerdo con la NASA, el suceso ocurrió el pasado 24 de septiembre de 2022. El FOD se ve al lado de una de las patas de aterrizaje del helicóptero y cómo se aleja después. Este objeto misterioso no era visible en las imágenes de la Cámara de Navegación (NavCam) del vuelo anterior, es decir, el número 32. La Agencia detalló que toda la telemetría del vuelo, así como una búsqueda y transferencia posteriores al vuelo son nominales y no muestran indicios de daños en el vehículo, aunque todavía no logran definir exactamente de qué se trata en realidad. Gracias a la NavCam, se puede ver las imágenes del objeto con forma de tela durante la excursión aérea, mostrando el despegue del helicóptero con los escombros colgando en una de sus patas, pero a medida que Ingenuity se movía por el aire, los desechos se desprendieron del módulo de aterrizaje.
Ingenuity concluye con éxito trigésimo cuarto vuelo en Marte. 22/11/2022. El vuelo 34 de Ingenuity fue corto pero significativo.
En comparación con algunos de los otros vuelos, el Vuelo 34 podría no resaltar especialmente. Ha sido más corto que el primer vuelo de Ingenuity; el exitoso vuelo de 18 segundos de ayer simplemente se elevó a poco más de 5 metros, se mantuvo en el aire y luego aterrizó. A pesar de la naturaleza simple del vuelo, el equipo está muy emocionado por lo que significa para el futuro de Ingenuity.
En vuelos anteriores, los pilotos de Ingenuity necesitaban encontrar aeródromos libres de rocas u otros obstáculos que pudieran dañar el vehículo al aterrizar. El cráter Jezero es un lugar rocoso, ¡así que ha sido difícil encontrar aeródromos seguros! Usando la cámara de navegación orientada hacia abajo de Ingenuity, esta actualización de software previene los riesgos al aterrizar. Durante el vuelo, Ingenuity identificará el lugar de aterrizaje visible más seguro. Al prepararse para aterrizar, Ingenuity se desviará hacia el lugar seleccionado. Esta capacidad permite que Ingenuity aterrice de forma segura en terrenos más rocosos que antes, proporcionando a nuestros pilotos muchos más sitios potenciales de aterrizaje.
El software de navegación de Ingenuity fue diseñado para asumir que el vehículo volaría sobre un terreno plano. Cuando el helicóptero vuela sobre un terreno como colinas, esta suposición de terreno plano hace que el software de navegación de Ingenuity piense que el vehículo está virando, lo que hace que Ingenuity comience a virar en un intento de contrarrestar el error. En vuelos largos, se deben tener en cuenta los errores de navegación causados por el terreno accidentado, lo que requiere que el equipo seleccione grandes aeródromos. Esta nueva actualización de software corrige esta suposición de terreno plano mediante el uso de mapas digitales de elevación del cráter Jezero para ayudar al software de navegación a distinguir entre cambios en el terreno y el movimiento del vehículo. Esto aumenta la precisión de Ingenuity, lo que permite a los pilotos apuntar a aeródromos más pequeños en el futuro.
Ingenuity concluye con éxito trigésimo quinto vuelo en Marte. 03/12/2022. Ingenuity bate récord de altitud de vuelo en Marte en su vuelo 35. El helicóptero Ingenuity de la NASA en Marte batió su propio récord de altitud en vuelo sobre el planeta rojo en su vuelo 35, el 3 de diciembre, alcanzando los 14 metros de altura. El récord anterior del pequeño helicóptero de 1,8 kilos fue de 12 metros logrado en tres vuelos anteriores a Marte, informó el JPL (Jet Propulsion Laboratory en su cuenta de Twitter.
Ingenuity cubrió unos 15 metros de distancia horizontal en el vuelo del sábado, que duró 52 segundos. El helicóptero ahora ha viajado un total de 7.407 metros y ha permanecido en el aire durante 59,9 minutos en sus 35 salidas a Marte, según el registro de vuelo de la misión. El vuelo del sábado fue el primero de Ingenuity desde el 22 de noviembre y solo el segundo que ha realizado desde una importante actualización de software. Esa actualización, que tardó varias semanas en instalarse, “brinda a Ingenuity dos nuevas capacidades importantes: evitación de peligros al aterrizar y el uso de mapas digitales de elevación para ayudar a navegar”, escribieron los miembros del equipo de la misión en una publicación de blog a fines del mes pasado.
El panel solar carga las baterías de iones de litio, proporcionando suficiente energía para un vuelo de 90 segundos por día marciano.
Ingenuity concluye con éxito trigésimo sexto vuelo en Marte. 10/12/202. Mars Helicopter Sol 642 – Cámara de navegación: Ingenuity Mars Helicopter de la NASA adquirió esta imagen usand o su cámara de navegación. Esta cámara está montada en el fuselaje del helicóptero y apunta directamente hacia abajo para rastrear el suelo durante el vuelo. Esta imagen fue adquirida el 10 de diciembre de 2022 (Sol 642 de la misión del rover Perseverance) a la hora solar media local de 16:31:22. Esta fue la fecha del vuelo 36 de Ingenuity. Créditos: NASA/JPL-Caltech. El helicóptero Ingenuity supera la hora de vuelo en Marte.
o su cámara de navegación. Esta cámara está montada en el fuselaje del helicóptero y apunta directamente hacia abajo para rastrear el suelo durante el vuelo. Esta imagen fue adquirida el 10 de diciembre de 2022 (Sol 642 de la misión del rover Perseverance) a la hora solar media local de 16:31:22. Esta fue la fecha del vuelo 36 de Ingenuity. Créditos: NASA/JPL-Caltech. El helicóptero Ingenuity supera la hora de vuelo en Marte.
El helicóptero Ingenuity de la NASA en Marte ha realizado su vuelo número 36 en el cráter Jezero, que se prolongó 60,5 segundos, lo que eleva a una hora y un minuto su tiempo total en el aire marciano. Este vuelo, de 110 metros, se produjo justo una semana después de que el Ingenio estableciera un nuevo récord de altitud, al elevarse 14 metros sobre el suelo del cráter Jezero de Marte el 3 de diciembre, llevando el tiempo de vuelo total a 59,9 minutos. El helicóptero alcanzó un máximo de 10 metros en el vuelo 36, según el diario de vuelo. Ingenuity, que pesa 1,8 kilos, aterrizó con el explorador Perseverance de la NASA en febrero de 2021, con la misión de demostrar que es posible volar con motor en Marte a pesar de la delgada atmósfera del planeta. El helicóptero superó ese objetivo principal durante una campaña de cinco vuelos en la primavera de 2021. A continuación, Ingenuity pasó a una misión ampliada en la que está ampliando los límites del vuelo en el Planeta Rojo y sirviendo de explorador para Perseverance. Según el diario de vuelo de Ingenuity, el helicóptero ha recorrido un total de 7.517 metros en sus 36 salidas y ha permanecido en el aire durante casi 61 minutos.
Ingenuity concluye con éxito trigésimo séptimo vuelo en Marte. 17/12/2022.
Lo cierto es que ha seguido haciéndolo, y el pasado 17 de diciembre efectuó su vuelo número 37. Últimamente los vuelos son especialmente cortos —no mucho más de 100 metros de distancia, apenas un minuto de duración— pero que siga realizándolos sigue siendo un regalo.
- Número de vuelo: 37
- Fecha de vuelo: NETO 17 de diciembre
- Duración del vuelo: 49 segundos
- Distancia de vuelo horizontal: 180 pies (55 metros)
- Velocidad de vuelo (horizontal): 6,7 mph (3 mps)
- Altitud máxima de vuelo: 33 pies (10 metros)
- Objetivo de vuelo: cambiar la posición del helicóptero y probar las nuevas capacidades del software de vuelo.
Ingenuity concluye con éxito su trigésimo octavo vuelo en Marte 04/01/2023
El Mars Helicopter In genuity de la NASA completó con éxito su vuelo número 38 el miércoles 4 de enero. Durante este vuelo, el pequeño helicóptero voló 363 pies (110 metros) sobre la superficie marciana durante 74,26 segundos a una altitud máxima de 33 pies (10 metros) para reposicionarse. Este fue el primer vuelo de Ingenuity en 2023.
genuity de la NASA completó con éxito su vuelo número 38 el miércoles 4 de enero. Durante este vuelo, el pequeño helicóptero voló 363 pies (110 metros) sobre la superficie marciana durante 74,26 segundos a una altitud máxima de 33 pies (10 metros) para reposicionarse. Este fue el primer vuelo de Ingenuity en 2023.
El pasado 8 de enero, el rover Perseverance le sacó una foto al cráter Jezero, pero también a su compañero de viajes marciano, al helicóptero Ingenuity. La vista muestra una amplia extensión rocosa de Jezero junto con algunas huellas de ruedas notables dejadas por el rover. Dunas de arena onduladas aparecen en la distancia.
«Ingenio en la vista más cercana / mejor que hemos visto en bastante tiempo, de manera segura en la zona de aterrizaje del vuelo 38 en el lado de una onda de arena poco profunda, ~ 280m NNE», tuiteó el usuario DejaSu. La NASA reconoció la robótica de larga distancia de Perseverance e Ingenuity. «El helicóptero de Marte y yo estamos más cerca de lo que hemos estado en mucho tiempo, y adivinen a quién vi descansando en una duna entre vuelos», tuiteó el equipo de Perseverance el miércoles. El mapa de la NASA de las ubicaciones actuales del rover y el helicóptero ofrece una buena visión de arriba hacia abajo del terreno marciano.
Ingenuity concluye con éxito su trigésimo noveno vuelo en Marte 11/01/2023
El Ingenuity realiza vuelos de prueba para demostrar que es posible el vuelo propulsado en la delgada atmósfera marciana. Hasta ahora, el pequeño helicóptero ha completado 39 vuelos de prueba. Según el diario de vuelo de la misión, el Ingenuity realizó su 39º vuelo marciano cubriendo 140 metros de terreno en el transcurso de casi 79 segundos. Hasta la fecha, el helicóptero ha volado un total de 7.830 m sobre Marte y ha permanecido en el aire durante más de 64 minutos, según el diario de vuelo de la misión. En esta fase de la misión, el helicóptero actúa como explorador para Perseverance, ayudando al equipo del rover a elegir las mejores rutas a través del accidentado paisaje de Jezero y a identificar afloramientos prometedores para estudiarlos en profundidad.
Ingenuity concluye con éxito su cuadragésimo vuelo en Marte 19/01/2023
El pasado día 19 el helicóptero Ingenuity completaba su vuelo número 40 en Marte. En él estuvo en el aire durante 91,62 segundos y recorrió 178 metros a una altura máxima de 10 metros. En total acumula 8.008 metros recorridos –sí, ocho kilómetros– y casi 66 minutos en el aire. Esto permitió que se desplazase desde el denominado Aeródromo Z al Aeródromo Beta. Ambos son, naturalmente, designaciones utilizadas por el equipo de la misión para referirse a lugares donde Ingenuity puede aterrizar. En su recorrido, sobrevoló algunas dunas antes de llegar a su destino.
Ingenuity concluye con éxito cuadragésimo primer vuelo en Marte 27/01/2023
Según el diario de vuelo de la misión, el Ingenuity realizó su 41º vuelo marciano cubriendo 183 metros de terreno en el transcurso de casi 109 segundos, a una altura de 10 m.
Ingenuity concluye con éxito su cuadragésimo segundo vuelo en Marte 04/02/2023
Según el diario de vuelo de la misión, el Ingenuity realizó su 42º vuelo marciano cubriendo 248 metros de terreno en el transcurso de 137,2 segundos, a una altura de 10 m. Esto permitió que se desplazase desde el denominado Aeródromo Beta al Aeródromo Gamma.
Ingenuity concluye con éxito su cuadragésimo tercer vuelo en Marte 16/02/2023
El helicóptero Ingenuity en Marte, primera aeronave a motor bajo control en otro mundo, ha completado su vuelo número 43, que ha sido el más largo en casi un año. Ingenuity viajó a lo largo de 390 me tros a través de la superficie marciana durante 145,99 segundos, y a 12 metros de altitud sobre el cráter Jezero de Marte, donde está desplegado junto al rover Perseverance, con el que llegó al planeta rojo hace ahora dos años, informa el JPL (Jet Propulsion Laboratory) en su cuenta de Twitter.
tros a través de la superficie marciana durante 145,99 segundos, y a 12 metros de altitud sobre el cráter Jezero de Marte, donde está desplegado junto al rover Perseverance, con el que llegó al planeta rojo hace ahora dos años, informa el JPL (Jet Propulsion Laboratory) en su cuenta de Twitter.
Imagen del suelo de Marte tomada por el helicóptero Ingneuity en su vuelo 43 NASA/JPL.
Según la previsión de este vuelo, el objetivo del vuelo fue reposicionar el aparato con un desplazamiento en dirección noroeste en el que tomó nuevas fotografías.
Ingenuity concluye con éxito el cuadragésimo cuarto vuelo en Marte 19/02/2023
Durante este vuelo, el pequeño helicóptero voló 1096 pies (334 metros) sobre la superficie marciana durante 141,3 segundos a una altitud máxima de 39 pies (12 metros) para reposicionarse.
Ingenuity concluye con éxito el cuadragésimo quinto vuelo en Marte 22/02/2023
Ingenuity capta la puesta de sol en Marte en pleno vuelo. El helicóptero Ingenuity de la NASA en Marte adquirió esta imagen espectacular de la puesta de sol en el cráter Jezero del planeta rojo utilizando su cámara en color de alta resolución.
 La imagen fue tomada el 22 de febrero de 2023 durante el vuelo número 45 de Ingenuity. La cámara en color de alta resolución de Ingenuity está situada 22 grados por debajo del horizonte. Por lo tanto, las imágenes transmitidas a la NASA desde el helicóptero de 1,8 kilos se centran principalmente en el suelo, en busca de características geológicas interesantes y posibles obstáculos. Ocasionalmente, sin embargo, un trozo de cielo marciano aparecerá en alguna de las fotografías. El helicóptero capturó una imagen de este tipo en su vuelo 45, pero con un protagonista aún más raro en el encuadre: el sol. La foto muestra el sol ligeramente por encima del horizonte de colinas en la distancia, en el día marciano 714 de Ingenuity, o sol. Los rayos que brillan en la fotografía ayudan a iluminar el ondulante paisaje extraterrestre de arena y rocas del cráter Jezero, y casi parece una foto que podría tomarse en un desierto de la Tierra.
La imagen fue tomada el 22 de febrero de 2023 durante el vuelo número 45 de Ingenuity. La cámara en color de alta resolución de Ingenuity está situada 22 grados por debajo del horizonte. Por lo tanto, las imágenes transmitidas a la NASA desde el helicóptero de 1,8 kilos se centran principalmente en el suelo, en busca de características geológicas interesantes y posibles obstáculos. Ocasionalmente, sin embargo, un trozo de cielo marciano aparecerá en alguna de las fotografías. El helicóptero capturó una imagen de este tipo en su vuelo 45, pero con un protagonista aún más raro en el encuadre: el sol. La foto muestra el sol ligeramente por encima del horizonte de colinas en la distancia, en el día marciano 714 de Ingenuity, o sol. Los rayos que brillan en la fotografía ayudan a iluminar el ondulante paisaje extraterrestre de arena y rocas del cráter Jezero, y casi parece una foto que podría tomarse en un desierto de la Tierra.
Durante este vuelo, el pequeño helicóptero voló 496 metros (162,7 pies) sobre la superficie marciana durante 144,5 segundos a una altitud máxima de 39 pies (12 metros) para reposicionarse. El vuelo fue una misión de reposicionamiento en preparación para dar más asistencia al rover Perseverance de la NASA mientras continúa explorando el cráter Jezero.
Ingenuity concluye con éxito el cuadragésimo sexto vuelo en Marte 25/02/2023
Durante este vuelo, el pequeño helicóptero voló 445 metros (1460 pies) sobre la superficie marciana durante 135,9 segundos a una altitud máxima de 39 pies (12 metros) para reposicionarse.
Ingenuity concluye con éxito el cuadragésimo septimo vuelo en Marte 09/03/2023
Durante este vuelo, el pequeño helicópte ro voló 440 metros (1444 pies) sobre la superficie marciana durante 146,1 segundos a una altitud máxima de 39 pies (12 metros) para reposicionarse.
ro voló 440 metros (1444 pies) sobre la superficie marciana durante 146,1 segundos a una altitud máxima de 39 pies (12 metros) para reposicionarse.
Perseverance graba el despegue de Ingenuity en su vuelo 47 en Marte. El helicóptero Ingenuity de la NASA en Marte ha sido grabado por una de las cámaras del rover Perseverance en el punto de partida de su vuelo número 47 en el cráter Jezero del Planeta Rojo.
Ingenuity concluye con éxito el cuadragésimo octavo vuelo en Marte 21/03/2023
Alcanza Ingenuity marca de 48 vuelos en Marte
El helicóptero Ingenuity graba su aterrizaje en el vuelo 48 en Marte
En la superficie de Marte, el rover Perseverance desplegó el helicóptero Ingenuity el pasado 3 de abril de 2021. Unos 720 días después, el Ingenuity logró completar su vuelo número 48, alcanzando una altitud de 12 m, viajando unos 398 m y permaneciendo en el aire durante 149.9 segundos, según el registro de vuelo de Ingenuity.
Con una envergadura (o aspa) de poco menos de 1.2 m y una masa de 1.8 kilogramos, lo que se traduce en 0.0033 gramos en Marte, Ingenuity es un explorador extraterrestre bastante pequeño. Especialmente en comparación con el último rover de Marte del tamaño de un automóvil de la NASA. Esto se puede lograr debido a que la atmósfera de Marte es extremadamente delgada, de solo el 1% de la densidad de la Tierra, por lo tanto, cualquier helicóptero que espere volar en Marte no solo debe mantener su peso bajo, sino también tener rotores capaces de proporcionar suficiente sustentación, de acuerdo con el portal Astronomy. Es por eso que los rotores de Ingenuity giran a una velocidad impresionante de 2,400 revoluciones por minuto (rpm), que es entre cinco y seis veces más rápido que las palas de un helicóptero promedio en la Tierra.
En total, Ingenuity ha pasado hasta ahora unos 84 minutos viajando unos 11,000 m sobre la superficie marciana. El helicóptero ha alcanzado una velocidad máxima de aproximadamente 21.6 km/h y una altitud máxima de 14 m.
máxima de 14 m.
El helicóptero alcanzó una altitud de 12 metros y viajó 398 metros durante 149,9 segundos. El vuelo se produjo en dirección noroeste a una velocidad de 4,65 metros por segundo. El objetivo fue el reposicionamiento del helicóptero y cubrir objetivos científicos de imágenes en el camino. La aeronave ha volado ya 11 kilómetros en total.
El rover Curiosity descubre un ‘fósil’ de dragón en Marte
El pasado 1 de abril, el rover Curiosity envió una sorprendente imagen de lo que se asemeja a un fósil con espinas. La astrobióloga Nathalie A. Cabrol dice al respecto que “llevo 20 años estudiando Marte, y es la cosa más bizarra que he visto“.
El rover Curiosity descubre un ‘fósil’ con espinas en Marte© Proporcionado por Computer
Ingenuity concluye con éxito el cuadragésimo noveno vuelo en Marte 02/04/2023
El helicóptero Ingenuity en Marte bate dos récords en su vuelo 49
El helicóptero Ingenuity de la NASA en Marte ha completado con éxito su vuelo número 49, estableciendo un nuevo récord de velocidad de vuelo de 6,5 metros por segundo y un récord de altitud de 16 metros. Este vuelo tuvo lugar el 2 de abril. Ingenuity, primera aeronave a motor de vuelo controlado en otro mundo, recorrió 282 metros en 142,7 segundos, informa la NASA.
El helicóptero estaba situado en el punto verde, y el rover con uno rojo en los lugares donde la comunicación no era posible. El punto amarillo muestra la posición de Perseverance justo antes del vuelo 50 de Ingenuity. Fuente: NASA/JPL-Caltech

Ingenuity concluye con éxito el quincuagésimo vuelo en Marte 13/04/2023
Cumplió su vuelo número 50 en el planeta rojo, informó la NASA este viernes (14.04.2023). La primera aeronave en otro planeta alcanzó la marca el pasado jueves, viajando más de 322,2 metros en 145,7 segundos. El helicóptero también logró un nuevo récord de altitud de 18 metros antes de aterrizar cerca del «Cráter Belva» de 800 metros de ancho. Con el vuelo número 50 en el libro de registros de la misión, el equipo de helicópteros planea realizar otro vuelo de reposicionamiento antes de explorar la región del «Fall River Pass» del cráter Jezero.
Ingenuity visto por Perseverance el 16 de abril de 2023 (sol 766) a 23 metros de distancia (NASA/JPL-Caltech/ASU/MSSS).
Ingenuity concluye con éxito el quincuagésimoprimer vuelo en Marte 22/04/2023
Durante este vuelo, el pequeño helicóptero voló 188 metros (617 pies) sobre la superficie marciana durante 136,9 segundos a una altitud máxima de 39 pies (12 metros) para reposicionarse. La velocidad alcanzada en esta ocasión fue de 4 metros por segundo.
Ingenuity aterrizó por primera vez en un terreno rocoso después de completar su vuelo número 50, pero recientemente, dicho dispositivo espacial fotografió al rover Perseverance en el cráter Belva durante el vuelo 51.
Como se puede observar en la fotografía de la noticia, la NASA explica en su blog que “el rover está en la parte superior izquierda de la imagen, estacionado en un afloramiento rocoso de tonos claros que el equipo científico llama ‘Echo Creek’. La sombra del helicóptero se puede ver en la colina rocosa en primer plano, justo a la derecha y debajo del centro de la imagen. Además, en la parte central inferior de la imagen se puede ver una pequeña pieza triangular de escombros del sistema de entrada, descenso y aterrizaje del rover“.
Por otro lado, la imagen de abajo es una vista am pliada del Perseverance, en la que aparecen las huellas que dejó el rover al hacer su recorrido por el planeta marciano.
pliada del Perseverance, en la que aparecen las huellas que dejó el rover al hacer su recorrido por el planeta marciano.
Mientras tanto, la siguiente fotografía es una vista ampliada de la pequeña pieza de escombros del rover. Pieza de escombros. NASA
Es motivo de celebración en el seno del Jet Propulsion Laboratory, laboratorio que maneja el destino de los robots marcianos, ya que el rover Perseverance ha podido encontrarse de nuevo con Ingenuity, tal y como muestra la NASA en su página web. Gracias al instrumento Mastcam-Z del rover, éste ha podido retratar al helicóptero de la NASA en un área del planeta rojo denominada como ‘Airfield Mu’ el día 14 de abril de este mismo año. Y la imagen del helicóptero aterrizando en dicho terreno no sería más que una anécdota interesante para los aficionados a la ciencia y el espacio, de no ser porque este aterrizaje ha sucedido por primera vez en terreno rocoso, marcando un hito en la exploración de Marte. Gracias a un algoritmo integrado en el sistema de guiado de Ingenuity, después de completar su vuelo número 50, el helicóptero pudo descansar sobre una superficie que aún esconde muchos secretos para el ser humano.
Trayecto de Perseverance (naranja) e Ingenuity (verde) hasta marzo de 2023 (NASA).

Ingenuity concluye con éxito el quincuagésimosegundo vuelo en Marte 26/04/2023
Durante este vuelo, el pequeño helicóptero voló 363 metros (1.191 pies) sobre la superficie marciana durante 145,0 segundos a una altitud máxima de 39 pies (12 metros) para reposicionarse. La velocidad alcanzada en esta ocasión fue de 3,70 metros por segundo.
Y cuando Ingenuity despegó para el vuelo 52, una colina presentó un obstáculo que impedía que el helicóptero y el rover se comunicaran entre sí.
“La parte del cráter Jezero que el rover y el helicóptero están explorando actualmente tiene mucho terreno accidentado, lo que hace que las interrupciones de las comunicaciones sean más probables”, dijo Josh Anderson, líder del equipo Ingenuity en JPL, en un comunicado. Según explica la agencia estadounidense, el rover actúa como “repetidor de radio entre el helicóptero y los controladores de la misión”. Dado que los de JPL ya esperaban una pérdida de conexión, planearon un ‘recontacto’ cuando el robot volviese a estar cerca de Ingenuity.
Ingenuity concluye con éxito el quincuagésimotercero vuelo en Marte 22/06/2023
Durante este vuelo, el pequeño helicóptero voló 142,5 metros (468 pies) sobre la superficie marciana durante 74,9 segundos a una altitud máxima de 16 pies (5 metros) para reposicionarse. La velocidad alcanzada en esta ocasión fue de 2,5 metros por segundo.
En su vuelo número 53, el helicóptero debía completar un vuelo de 136 segundos que incluía moverse 203 metros hacia el norte a una altitud de 5 metros, un descenso vertical a la mitad de la altitud y una última etapa en la que se elevaría 10 metros. Todo esto en teoría, claro, porque Ingenuity tuvo un problema a mitad de camino que le impidió completar la misión.
Como explica la NASA en una publicación, la pequeña máquina con hélices voló 142 metros cuando se activó su programa de contingencia de vuelo y realizó un aterrizaje de emergencia. El pequeño helicóptero surcó los cielos marcianos el 26 de abril para su vuelo número 52, pero perdió contacto con los controladores de la misión antes de aterrizar, creando un apagón de comunicaciones de un mes de duración.
Pero Ingenuity volvió a llamar a casa el 28 de junio, disipando cualquier preocupación potencial sobre la seguridad y el paradero de la primera aeronave en otro planeta. Sin embargo, sigue siendo mucho tiempo para que los humanos aquí en la Tierra confirmen que Ingenuity aterrizó a salvo. El vuelo tenía la intención de reposicionar el helicóptero y capturar imágenes de la superficie marciana. El equipo de la misión anticipó que podría ocurrir un corte de comunicación. Esto se debe a que el helicóptero Ingenuity se comunica con el control de la misión en el Laboratorio de Propulsión a Chorro de la NASA (JPL, por sus siglas en inglés) en Pasadena, California, transmitiendo todos los mensajes a través del rover Perseverance.
El equipo de Ingenuity cree que este aterrizaje de emergencia se produjo porque las imágenes de la cámara de navegación del helicóptero no se sincronizaban con los datos de su unidad de medición inercial (el aparato que mide la aceleración y la rotación del helicóptero), como explicaba la NASA.
“Desde el primer vuelo hemos incluido un programa llamado ‘LAND_NOW’ que fue diseñado para aterrizar el helicóptero sobre el suelo lo antes posible si este se encontraba con algunos escenarios fuera de lo normal”, explicó Teddy Tzanetos, líder del equipo del Ingenuity del Laboratorio de Propulsión a Chorro de la NASA en un comunicado. “Durante el vuelo 53, nos topamos con uno de esos escenarios, y el helicóptero funcionó según lo planeado y ejecutó un aterrizaje de emergencia inmediato”.
Una imagen captada por el rover Perseverance muestra una misteriosa roca con forma de dónut en la superficie de Marte.
El rover recoge muestras de rocas, rocas rotas y suelo (llamado regolito) para su posible retorno a la Tierra en una futura misión a Marte.
El “dónut” de Marte es uno de los últimos objetos captados a unos 100 metros de distancia en el delta del cráter Jezero por la SuperCam Remote Micro-Imager, una de las cámaras del rover que ayuda a los científicos a ver lo que hay en la superficie del planeta.
El equipo del Perseverance no ha hecho que el rover se acerque a la roca en forma de rosquilla para examinarla o tomar muestras de ella, por lo que se desconoce su composición y origen exactos, según Jim Rice, científico investigador adjunto de la Escuela de Exploración Terrestre y Espacial de la Universidad Estatal de Arizona. Rice, que forma parte del equipo de imágenes Mastcam-Z del rover, observó la roca por primera vez el 14 de junio.
El Mars Perseverance de la NASA captó esta imagen el 23 de junio en el cráter Jezero del planeta. (Crédito: NASA/JPL-Caltech/LANL/CNES/IRAP)
Los científicos tienen algunas hipótesis sobre cuál es el origen de la roca, y cuál no.
“No puedo decir con absoluta certeza que no sea un meteorito, pero creo que es muy poco probable”, dijo Rice. “La razón por la que lo digo es porque en esta región en la que estamos vemos muchas rocas que tienen este tipo de interiores huecos”.
Las rocas típicas de esta región son areniscas sedimentarias que probablemente tengan unos cuantos miles de millones de años, explicó Rice. “Fueron traídas por las inundaciones de este gran canal fluvial, el Neretva Vallis, que es el que trajo el agua, las rocas y los sedimentos”.
El canal fluvial probablemente transportó la roca en forma de rosquilla desde otra zona, añadió. La roca tiene más de 25 centímetros de ancho, pero se desconoce cuánto mide exactamente, dijo Rice.
Otra roca podría haber estado incrustada en el centro de la roca en forma de rosquilla antes de que el tiempo la erosionara dejando una cavidad, añadió. El viento también puede agrandar gradualmente las pequeñas fosas o cavidades que ya existían. O la roca podría haber sido más débil en su centro.
“Desde el punto de vista científico no es nada especial”, dijo Rice.
Pascal Lee, científico planetario del Instituto SETI, cree que podría tratarse de un meteorito, dados los avistamientos de meteoritos en Marte y la proximidad del planeta al cinturón de asteroides, así como su capacidad para conservar meteoritos.
La roca está rodeada de rocas o fragmentos más pequeños, “por lo que tal vez (se trate) de un meteorito que se rompió al aterrizar”, dijo Lee. En este caso, la forma de rosquilla podría haberse creado por la erosión de los materiales más débiles de la roca al entrar en la atmósfera de Marte, añadió.
También es posible que la roca fuera “arrojada desde otra parte de Marte por el impacto de un gran asteroide”, explicó Lee. “Recomendaría que Perseverance se desviara de su curso actual para comprobarlo”.
El equipo del rover no tiene planes de hacerlo, ya que actualmente está conduciendo a Perseverance en la dirección opuesta hacia las rocas que eventualmente muestreará, dijo Rice.
El dónut de Marte no es la única roca con forma de dulce que se ha encontrado en el planeta. En 2014, el rover Opportunity de la NASA descubrió una pequeña roca blanca por fuera y roja por dentro, como un dónut de gelatina, según Lee.
Ingenuity concluye con éxito el quincuagésimocuarto vuelo en Marte 03/08/2023
Durante este vuelo, el pequeño helicóptero voló 0 metros (0 pies) sobre la superficie marciana durante 24,4 segundos a una altitud máxima de 16 pies (5 metros) para reposicionarse. La velocidad alcanzada en esta ocasión fue de 0 metros por segundo.
El Ingenuity Mars Helicopter de la Nasa completó con éxito su vuelo número 54 el pasado jueves, el primero desde que el helicóptero interrumpió su vuelo del 22 de junio. El salto de 25 segundos hacia arriba y hacia abajo proporcionó datos que podrían ayudar al equipo de Ingenuity a determinar por qué su vuelo 53 terminó antes de tiempo.
El vuelo 54 era “solo” una elevación vertical sin ningún desplazamiento horizontal. Las características oficiales (anunciadas en el avance) reportan una altura máxima de 5 metros con una duración de 24,4″ sin movimiento en otros aeródromos (el helicóptero siempre permaneció en Omicron) y sin movimientos horizontales ni de velocidad con respecto al suelo detectados.
Ingenuity concluye con éxito el quincuagésimoquinto vuelo en Marte 12/08/2023
Durante este vuelo, el pequeño helicóptero voló 263,99 metros (866 pies) sobre la superficie marciana durante 142,9 segundos a una altitud máxima de 33 pies (10 metros) para reposicionarse. La velocidad alcanzada en esta ocasión fue de 4,7 metros por segundo.
Ingenuity ahora ha cubierto un total de 12.503 metros de tierra y permaneció en el aire durante casi 98 minutos en sus 55 vuelos, escribieron los miembros del equipo de la misión en el registro de vuelo del helicóptero.
Precisamente el rover actualmente está investigando una enigmática roca sedimentaria que Ingenuity detectó por primera vez durante su vuelo 52 hace varias semanas.
Ingenuity concluye con éxito el quincuagésimosexto vuelo en Marte 26/08/2023
Durante este vuelo, el pequeño helicóptero voló 410 metros (1334 pies) sobre la superficie marciana durante 136 segundos a una altitud máxima de 39.37 pies (12 metros) para reposicionarse.
Ingenuity concluye con éxito el quincuagésimoseptimo vuelo en Marte 02/09/2023
Durante este vuelo, el pequeño helicóptero voló 204 metros (669,3 pies) sobre la superficie marciana durante 120,12 segundos a una altitud máxima de 32,8 pies (10 metros) para reposicionarse. La velocidad alcanzada en esta ocasión fue de 3 metros por segundo.
El helicóptero Ingenuity de la NASA ha logrado otro hito en su misión en Marte al superar los 13 kilómetros de distancia recorrida en vuelo, En su vuelo número 57.
Ingenuity concluye con éxito el quincuagésimo-octavo vuelo en Marte 11/09/2023
Durante este vuelo, el pequeño helicóptero voló 171,38 metros (562,27 pies) sobre la superficie marciana durante 129,8 segundos a una altitud máxima de 32,8 pies (10 metros). La velocidad alcanzada en esta ocasión fue de 2 metros por segundo. Objetivo del vuelo: 1) Reposición del helicóptero 2) Metas científicas por imágenes
Ingenuity concluye con éxito el quincuagésimonoveno vuelo en Marte 16/09/2023
Durante este vuelo, el pequeño helicóptero voló 0 metros (0 pies) sobre la superficie marciana durante 142,94 segundos a una altitud máxima de 65,6 pies (20 metros). Vuelo exclusivamente vertical. Objetivo del vuelo: 1) Reposición del helicóptero 2) Metas científicas por imágenes
El helicóptero Ingenuity de la NASA en Marte ha batido su récord de altitud en vuelo sobre el cráter Jezero del Planeta Rojo, alcanzando 20 metros sobre el suelo, dos más que la marca anterior. Ingenuity pudo despegar, elevarse y aterrizar en el mismo lugar, denominado campo de aterrizaje Sigma.
Ingenuity concluye con éxito el sextuagésimo vuelo en Marte 25/09/2023
Durante este vuelo, el pequeño helicóptero voló 326,493 metros (1071,17 pies) sobre la superficie marciana durante 124,18 segundos a una altitud máxima de 52,49 pies (16 metros). La velocidad alcanzada en esta ocasión fue de 8 metros por segundo. Objetivo del vuelo: 1) Reposición del helicóptero 2) Metas científicas por imágenes. En esta ocasión, la aeronave alzó vuelo a una velocidad de 8 metros por segundo, superando su antigua marca de 6,5 metros por segundo obtenida en el vuelo 49 el pasado 2 de abril.
Ingenuity concluye con éxito el sextuagésimoprimer vuelo en Marte 29/09/2023
Durante este vuelo, el pequeño helicóptero hizo un vuelo vertical, sin desplazamiento horizontal. Con una duración de 129,69 segundos a una altitud máxima de 58,74 pies (24 metros). Objetivo del vuelo: Vuelo emergente
Ingenuity concluye con éxito el sextuagésimosegundo vuelo en Marte 11/10/2023
Durante este vuelo, el pequeño helicóptero voló 268 metros (879,26 pies) sobre la superficie marciana durante 119,30 segundos a una altitud máxima de 59,05 pies (18 metros). La velocidad alcanzada en esta ocasión fue de 10 metros por segundo (nuevo récord). Objetivo del vuelo: 1) Ciencia de la imagen objetivos 2) Ampliación de la envolvente de vuelo Aeródromo.
Ingenuity concluye con éxito el sextuagésimotercer vuelo en Marte 18/10/2023
Vuelo 63 fecha de vuelo: 19/10/2023 Distancia de vuelo horizontal: 573,93 metros (1882,97 pies) Tiempo de vuelo: 137 segundos Altitud de vuelo: 12 metros (39,37 pies). Rumbo: SO Velocidad máxima de vuelo: 6,3 m/s Objetivo del vuelo: 1) Reposición del helicóptero 2) Metas científicas por imágenes
Ingenuity concluye con éxito el sextuagésimocuarto vuelo en Marte 25/10/2023
Durante este vuelo, el pequeño helicóptero voló 408,435 metros (1340 pies) sobre la superficie marciana durante 124,5 segundos a una altitud máxima de 39,37 pies (12 metros). La velocidad alcanzada en esta ocasión fue de 5,3 metros por segundo. Objetivo del vuelo: 1) Ciencia de la imagen objetivos 2) Ampliación de la envolvente de vuelo Aeródromo.
Ingenuity concluye con éxito el sextuagésimoquinto vuelo en Marte 01/11/2023
Durante este vuelo, el pequeño helicóptero voló 7 metros (22,96 pies) sobre la superficie marciana durante 48,26 segundos a una altitud máxima de 32,8 pies (10 metros). La velocidad alcanzada en esta ocasión fue de 1 metros por segundo. Objetivo del vuelo: Reposición del helicóptero Vuelo 65
Ingenuity concluye con éxito el sextuagésimosexto vuelo en Marte 02/11/2023
Durante este vuelo, el pequeño helicóptero voló 0,5 metros (1,6 pies) sobre la superficie marciana durante 23,38 segundos a una altitud máxima de 9,84 pies (3 metros). La velocidad alcanzada en esta ocasión fue de 1 metros por segundo. Objetivo del vuelo: reposicionar el helicóptero.
De hecho, los vuelos 65 y 66 del Ingenuity se llevaron a cabo de manera consecutiva, con distancias registradas de 7 metros y un poco más de medio metro, según se detalla en el diario de vuelo del helicóptero. Estas maniobras fueron necesarias para reposicionar el helicóptero de cara al cierre de las comunicaciones con el Jet Propulsion Laboratory, que se extenderá por aproximadamente dos semanas. Esto se debe a una próxima conjunción solar, que implica que la Tierra y Marte estarán separados por el Sol, imposibilitando el establecimiento de contacto entre ambos planetas. Este fenómeno ocurre aproximadamente cada dos años, y en la ocasión anterior, en septiembre de 2021, las comunicaciones se restablecieron después de que la conjunción solar concluyó.
Ingenuity concluye con éxito el sextuagésimoseptimo vuelo en Marte 02/12/2023
Durante este vuelo, el pequeño helicóptero voló 393 metros (1.289 pies) sobre la superficie marciana durante 135,9segundos a una altitud máxima de 39 pies (12 metros). La velocidad alcanzada en esta ocasión fue de 5,30 metros por segundo. Objetivo del vuelo: reposicionar el helicóptero.
El helicóptero Ingenuity de la NASA en Marte ha superado el hito de volar dos horas en la tenue atmósfera del Planeta Rojo, con ocasión de su vuelo número 67. La aeronave, que contribuye con sus imágenes a planificar la exploración en superficie de Perseverance, totaliza 15.3 kilómetros recorridos en la atmósfera de Marte, que tiene menos del uno por ciento de la densidad de la terrestre.
Ingenuity concluye con éxito el sextuagésimoctavo vuelo en Marte 15/12/2023
Durante este vuelo, el pequeño helicóptero voló 702 metros (2.304 pies) sobre la superficie marciana durante 131,1 segundos a una altitud máxima de 52 pies (16 metros). La velocidad alcanzada en esta ocasión fue de 10 metros por segundo. Objetivo del vuelo: reposicionar el helicóptero.
El vuelo del viernes 15 alcanzó una velocidad máxima de 36 km/h, según el registro de vuelo. Esa marca empató el récord de velocidad de Ingenuity, que se estableció en octubre pasado.
Ingenuity concluye con éxito el sextuagésimnoveno vuelo en Marte 20/12/2023
Durante este vuelo, el pequeño helicóptero voló 705 metros (2.315 pies) sobre la superficie marciana durante 135,4 segundos a una altitud máxima de 52 pies (16 metros). La velocidad alcanzada en esta ocasión fue de 10 metros por segundo. Objetivo del vuelo: reposicionar el helicóptero.
El helicóptero Ingenuity de la NASA en Marte ha batido su anterior marca de distancia recorrida en vuelo, al alcanzar 705 metros entre despegue y aterrizaje en el cráter Jezero. Ingenuity, primera aeronave de vuelo a motor controlado en otro mundo, logró este hito en su vuelo 69, realizado el 20 de diciembre, con origen y destino en el mismo punto.
Ingenuity concluye con éxito el septuagésimo vuelo en Marte 22/12/2023
Durante este vuelo, el pequeño helicóptero voló 260 metros (853 pies) sobre la superficie marciana durante 132,9 segundos a una altitud máxima de 39 pies (12 metros). La velocidad alcanzada en esta ocasión fue de 3 metros por segundo. Objetivo del vuelo: reposicionar el helicóptero.
Ingenuity concluye con éxito el septuagésimoprimer vuelo en Marte 06/01/2024
Durante este vuelo, el pequeño helicóptero voló 71 metros (233 pies) sobre la superficie marciana durante 35 segundos a una altitud máxima de 39 pies (12 metros). La velocidad alcanzada en esta ocasión fue de 7 metros por segundo. Objetivo del vuelo: reposicionar el helicóptero.
Ingenuity concluye con éxito el septuagésimosegundo vuelo en Marte 18/01/2024
El 18 de enero los encargados de la misión decidieron dar otro pequeño salto de medio minuto y 12 metros de altitud sin desplazamiento horizontal para comprobar el estado de los sistemas. Ingenuity se elevó en su 72º vuelo y, tras alcanzar los 12 metros de altitud, permaneció 4,5 segundos estacionario en la misma posición antes de comenzar el descenso a 3,6 km/h. Lamentablemente, en esta fase el sistema de navegación volvió a perder la orientación y, probablemente, ejecutó una maniobra de evasión pensando que estaba desplazándose horizontalmente con respecto al suelo cuando en realidad su velocidad horizontal era nula. Como resultado, una de las palas chocó contra el suelo y resultó dañada. Al mismo tiempo se perdió la comunicación con el rover y, por tanto, con la Tierra. La NASA decidió que Ingenuity no puede seguir volando y el 25 de enero se declaró el fin oficial de la misión del primer helicóptero que ha volado por los cielos de Marte.
A lo largo de su historia, Ingenuity ha efe ctuado 72 vuelos, recorriendo un total de 17 kilómetros. Ha estado en el aire más de dos horas en total, 128,8 minutos, y ha llegado a una altura máxima de 24 metros y una velocidad máxima de 36 km/h.
ctuado 72 vuelos, recorriendo un total de 17 kilómetros. Ha estado en el aire más de dos horas en total, 128,8 minutos, y ha llegado a una altura máxima de 24 metros y una velocidad máxima de 36 km/h.
Ruta de Ingenuity en estos dos años (NASA).

Ingenuity plegado en la Tierra antes del lanzamiento tras ser unido a la barriga de Perseverance (NASA).
Gracias al éxito de Ingenuity la NASA ha decidido incluir dos helicópteros en la próxima sonda del programa MSR (Mars Sample Return) para traer muestras de Marte a la Tierra. Estos helicópteros, los SRH (Sample Recovery Helicopter), llevarán un brazo robot para recoger muestras dejadas por Perseverance y llevarlas hasta la sonda SRL (Sample Retrieval Lander) para luego enviarlas a la órbita marciana y, de allí a la Tierra. Funcionarán como plan B en caso de que Perseverance no esté operativo (por problemas de presupuesto puede que solo vaya un helicóptero). Del mismo modo, China e India están sopesando incluir helicópteros en su próxima misión marciana, que, en el caso de China, sería otra misión de retorno de muestras (Tianwen 3).
Zhurong
Artículo entresacado de diversas publicaciones del blog de Astronáutica: Eureka
Sábado, 15 mayo 2021
China ha logrado este sábado aterrizar en Marte su sonda Tianwen-1, lo que marca un hito al ser la primera vez que consigue posar un módulo de aterrizaje en un planeta que no es la Tierra, según ha informado la agencia estatal de noticias Xinhua.
Tianwen-1 despegó de la Tierra el 23 de julio y alcanzó la órbita del planeta rojo en febrero. El vuelo es uno de los más difíciles que jamás haya emprendido China. El aterrizaje es un gran desafío, ya que Marte tiene su propia atmósfera, a diferencia de la Luna.
Si todo va según lo planeado, el rover Zhurong que transporta la sonda, llamado así por el dios chino del fuego, investigará el Marte durante al menos tres meses. Los rovers pesan alrededor de 240 kilogramos, tienen seis ruedas y cuatro paneles solares y pueden moverse sobre la superficie de Marte a 200 metros por hora, recoge la agencia DPA. Lleva instrumentos científicos que se utilizarán para recopilar información sobre la composición de la superficie del planeta y su estructura geológica y clima.
Con su primer aterrizaje en Marte, China quiere alcanzar a Estados Unidos, que ya ha enviado varios dispositivos de investigación para recorrer el planeta. La Unión Soviética tuvo un aterrizaje exitoso en la década de 1970, pero finalmente perdió el contacto con su sonda.
Pekín ha expandido constantemente su programa espacial en los últimos años y tiene misiones planeadas para décadas en el futuro. La misión china es uno de los tres vuelos a Marte que se lanzaron desde la Tierra el verano pasado. Los otros lanzamientos fueron de Emiratos Árabes Unidos y Estados Unidos, que logro aterrizar el rover Perseverance en febrero.
China logra posar pequeño robot en Marte
En 2011 China intentó con Rusia enviar una sonda a Marte, pero el intento fracasó y Pekín decidió proseguir la aventura solo.
“Utopia Planitia”
El aterrizaje tuvo lugar en una zona del planeta rojo denominada “Utopia Planitia”, una vasta planicie situada en el hemisferio norte de Marte.
Se trata para los chinos de su primer intento independiente y ambicioso pues esperan hacer todo lo que los estadounidenses han hecho en varias misiones marcianas desde los años 1960.
En febrero, China logró colocar la sonda “Tianwen-1” en órbita marciana y tomar fotos del planeta rojo.
Realizar estas tres operaciones en una primera misión a Marte es una primicia mundial.
Con un peso de más de 200 kg, “Zhurong” está equipado de cuatro paneles solares para su alimentación eléctrica, y pretende estar operativo durante tres meses.
También está equipado con cámaras, un radar y láser que le permitirán estudiar el entorno y analizar la composición de las rocas marcianas.
El nombre de “Zhurong” fue elegido tras un sondeo en línea y hace referencia al dios del Fuego en la mitología china. Un simbolismo justificado por la apelación china de Marte: “huoxing”, literalmente, “el planeta de fuego”.
China hará desde este 15 de mayo compañía a los róveres Curiosity y Perseverance de la NASA, activos en Marte. En los próximos días les dirá ‘nĭ hăo’ (hola), aunque a gran distancia. En un hito histórico, el país asiático ha conseguido poner en la superficie marciana un vehículo de exploración robótica o róver al primer intento. Este sábado ha posado la cápsula que lo contiene, desprendida desde la sonda Tianwen 1, que llegó a las alturas de Marte el pasado 10 de febrero.
Dentro de la cápsula está el róver Zhurong. Es la primera vez desde las misiones Viking que un orbitador despliega una cápsula para aterrizar en Marte. La llegada del orbitador a Marte, en febrero, ya hizo de China la segunda potencia espacial. Rival o cooperador en el futuro, la carrera espacial del siglo XXI se disputa oficialmente entre Estados Unidos y una China cuya agencia (CNSA) consiguió, también, recoger piedras de la Luna para explorarlas en la Tierra.
Eso sí, esta llegada a Marte de China ha estado envuelta en un silencio que contrasta con la espectacularidad de las misiones de la NASA. Nada de retransmisiones en televisión o internet. Apenas se anunció un par de días antes. Y sólo tras confirmarse en amartizaje, el presidente Xi Jinping envió un mensaje a los científicos y funcionarios de la agencia espacial elogiando el logro chino.
“Este es otro hito en los esfuerzos aeroespaciales de nuestro país”, dijo. “Habéis tenido el coraje de desafiar, de esforzaros por la excelencia y habéis llevado a nuestro país a la vanguardia mundial de la exploración interplanetaria”.
Nueve minutos de terror en silencio
El módulo de aterrizaje y el explorador se separaron de la nave espacial china Tianwen 1 a las 04.00 horas locales 22.00 del viernes, hora peninsular, y descendieron hacia el planeta rojo durante tres horas. Entraron en la débil atmósfera de Marte a una altura de 125 kilómetros, iniciando la fase más arriesgada de la misión.
Cuando la velocidad de la cápsula se redujo entonces de 4,8 kilómetros por segundo a 460 metros por segundo, un gran paracaídas con una superficie de cerca de 200 m2 se desplegó para continuar reduciendo su marcha hasta los 100 metros por segundo.
El paracaídas y la cubierta exterior de la cápsula se desprendieron entonces, mientras se activaba el retrocohete del módulo de aterrizaje para disminuir aún más la velocidad hasta casi cero. A unos 100 metros de la superficie marciana, el artefacto flotó unos instantes para identificar obstáculos y medir la pendiente de la superficie. Seleccionó un área relativamente plana y descendió lentamente (o eso creemos) posándose con éxito sobre ella con sus cuatro patas amortiguadoras.
Todo esto, claro, sin emisión en vivo. Sólo se pudo seguir el rastro de radiofrecuencia que algunos aficionados fueron publicando en sus streams y redes sociales. Las naves espaciales dejan un rastro de su comportamiento lejano y si se cuenta con instrumental adecuado, se puede captar desde la Tierra.
La entrada de la cápsula en la atmósfera de Marte, que duró cerca de nueve minutos, fue extremadamente complicada, sin control desde tierra y tuvo que ser realizada por la nave espacial de forma autónoma, explicó Gen Yan, un portavoz de la CNSA, en declaraciones recogidas por Efe.
Con el aterrizaen en Marte de hoy, China se convierte en el primer país en viajar hasta el planeta rojo, entrar en su órbita y explorarlo en una sola misión, con un coste de cerca de unos 6.600 millones de euros. La Tianwen 1, cuyo nombre en chino significa preguntas del cielo –en referencia a un clásico poema chino–, fue lanzada el 23 de julio de 2020 desde el centro espacial de Wenchang en la isla meridional de Hainan.
De todas formas, no está previsto que el rover descienda a la superficie hasta el 22 de mayo aproximadamente. El día 27 el módulo de descenso y el rover se fotografiarán mutuamente y el día 28 se recibirán los primeros datos científicos.
Zona del aterrizaje (CASC en Weibo). El control del descenso de la misión Tianwen 1 (Xinhua). Partes de la sonda Tianwen 1 (https://www.weibo.com/u/6270293881).

En cualquier caso, China lo ha logrado. Es difícil no exagerar el éxito de esta noticia y las repercusiones que puede tener a medio y largo plazo. La demostración tecnológica es apabullante para un país primerizo en la exploración de Marte. China ha conseguido aterrizar suavemente con un rover al primer intento. Ninguna nación ha llevado a cabo hasta la fecha una primera misión a Marte tan ambiciosa. Y lo ha hecho además con una misión que incorpora soluciones de alta tecnología, como por ejemplo, el empleo de un flap aerodinámico en la cápsula y navegación óptica para aumentar la precisión del descenso y garantizar que el módulo no aterrizase sobre terreno peligroso (no en vano, recordemos que la NASA solo introdujo la navegación óptica en la misión Perseverance este año). Evidentemente, el rover todavía tiene que descender y rodar por la superficie —dos sucesos que entrañan su propia complejidad y no están exentos de riesgos—, además de funcionar durante un mínimo de 92 días para completar su misión. Pero para una «misión experimental» destinada a demostrar una pléyade de nuevas tecnologías, se trata de un éxito rotundo se mire por donde se mire. Recordemos además que Zhurong tiene unas dimensiones de 2 x 1,65 x 0,8 metros y una masa de 240 kg, lo que significa que es más grande y masivo que los rovers Spirit y Opportunity de la NASA —de 185 kg—, aunque mucho menos que Curiosity y Perseverance (cerca de una tonelada).
Paracaídas de Zhurong (Weibo). El flap aerodinámico que lleva la cápsula (https://9ifly.spacety.com/). 
Desde 2013 China ha aterrizado en la Luna tres sondas, dos rovers y una misión de recogida de muestras. A pesar de que han sido las primeras naves en posarse en nuestro satélite desde 1976, sus logros han sido sistemáticamente ignorados por buena parte de los medios (no así por la comunidad científica). El aterrizaje del rover Zhurong en Marte es diferente. Las dos próximas misiones a Marte que China planea lanzar en 2026 deben traer muestras del planeta rojo en 2031, quizá incluso antes de que la NASA haga lo propio con su misión MSR. La carrera por Marte ha comenzado.
Detalle del módulo de descenso durante las pruebas en Tierra (China航天 en Weibo).
Eventos del rover tras el aterrizaje:
- 05-15 08:01:24 hora de Pekín (00:01 UTC): rover en estado de reposo.
- 08:14:39: comienza el periodo comunicaciones.
- 08:32:04: finaliza periodo comunicaciones.
- 08:38:04: separación y levantamiento del rover.
- 08:59:04: se abren los paneles solares.
- 09:48:39: comienza el seguimiento del Sol.
- 12:00:39: descarga de datos de telemetría.
- 12:29:39: descarga de datos de telemetría cercana.
- 13:15:39: descarga de telemetría de los dos vehículos por separado.
La «gran pantalla roja del éxito» (CCTV). Celebrando el éxito (Xinhua).
(CCTV). Celebrando el éxito (Xinhua).
La entrada El rover Zhurong de la misión Tianwen 1 aterriza con éxito en Marte fue escrita en Eureka.
La cápsula de la sonda Tianwen 1 desciende por la atmósfera marciana
Secuencia de descenso detallada del módulo de descenso con Zhurong (https://www.weibo.com/vony227).
 La sonda Tianwen 1 llegó a Marte el pasado 10 de febrero y, tras varias maniobras orbitales, actualmente se encuentra en una órbita de reconocimiento muy elíptica de 265 x 60000 kilómetros y 87º de inclinación, con un periodo de dos días. En esta órbita la sonda ha fotografiado la zona de descenso en alta resolución con su cámara HiRIC para reducir la incertidumbre en la elipse de aterrizaje. Cinco horas antes de la entrada atmosférica, el orbitador Tianwen 1 realizará un encendido para reducir su periapsis y ponerse en una trayectoria de colisión con la atmósfera. Esta maniobra es necesaria para que la cápsula, que carece de un sistema de propulsión propio, pueda entrar en la atmósfera marciana. Poco después de la separación, el orbitador volverá a encender sus motores para elevar su periapsis hasta los 265 kilómetros, evitando así quemarse en la atmósfera del planeta rojo.
La sonda Tianwen 1 llegó a Marte el pasado 10 de febrero y, tras varias maniobras orbitales, actualmente se encuentra en una órbita de reconocimiento muy elíptica de 265 x 60000 kilómetros y 87º de inclinación, con un periodo de dos días. En esta órbita la sonda ha fotografiado la zona de descenso en alta resolución con su cámara HiRIC para reducir la incertidumbre en la elipse de aterrizaje. Cinco horas antes de la entrada atmosférica, el orbitador Tianwen 1 realizará un encendido para reducir su periapsis y ponerse en una trayectoria de colisión con la atmósfera. Esta maniobra es necesaria para que la cápsula, que carece de un sistema de propulsión propio, pueda entrar en la atmósfera marciana. Poco después de la separación, el orbitador volverá a encender sus motores para elevar su periapsis hasta los 265 kilómetros, evitando así quemarse en la atmósfera del planeta rojo.
Partes de Zhurong (Eureka/China Pictorial).
Otra vista de las fases de descenso (https://9ifly.spacety.com/).
El paracaídas se abrirá a unos 1660 km/h cuando la sonda esté a más de 4 kilómetros de altura. A 3 kilómetros del suelo se separará el escudo térmico, lo que permitirá el despliegue de las cuatro patas del tren de aterrizaje y que el radar comience a proporcionar datos de altura y velocidad con respecto al suelo. El paracaídas y el escudo térmico trasero se separarán a 1,5 kilómetros de altura mientras la sonda se mueve a menos de 340 km/h. En ese momento se encenderán los propulsores, que guiarán el módulo hasta la superficie. A cien metros de altura se parará brevemente el descenso para dar comienzo a la fase de navegación óptica, en la que la sonda también empleará un LIDAR. Si todo va bien, el módulo de descenso con el rover Zhurong se posará a una velocidad de unos 3 km/h.
El orbitador Tianwen 1 tenía una masa de 3175 kg al lanzamiento, mientras que la cápsula con la etapa de descenso alcanza los 1745 kg (la etapa de descenso propiamente dicha tiene una masa de 1300 kg). El rover Zhurong tiene unas dimensiones de 2 x 1,65 x 0,8 metros y una masa de 240 kg. Es el rover más pesado construido por China, ya que los rovers lunares Yutu y Yutu 2 tienen una masa de 140 kg. También supera a los rovers MER de la NASA Spirit y Opportunity, de 185 kg cada uno, aunque queda muy lejos de la tonelada de masa de Curiosity o Perseverance. Zhurong debe funcionar durante un mínimo de 92 días. En este tiempo explorará Utopia Planitia con sus seis instrumentos: la cámara a color MSCam (Multispectral Camera), formada por dos cámaras en estéreo con 9 filtros y un sensor de 2048 x 2048 píxeles, las cámaras de navegación NaTeCam (Navigation and Terrain Camera), el radar RoPeR (Mars Rover Penetrating Radar), basado en el que han llevado los dos rovers lunares Yutu y Yutu 2 y capaz de alcanzar los 100 metros de profundidad, el espectrómetro MarSCoDe (Mars Surface Composition Detector ), que incluye un espectrómetro infrarrojo y otro láser, además de un microscopio, la estación meteorológica MCS (Mars Climate Station) y el magnetómetro RoMAG (Mars Rover Magnetometer). El espectrómetro láser LIBS (Laser-Induced Breakdown Spectroscopy) ha sido desarrollado en colaboración con el CNES francés a través del IRAP (Institut de Recherche en Astrophysique et Planétologie) y tiene un diseño parecido al de los instrumentos ChemCam y SuperCam de los rover Curiosity y Perseverance, también construidos con ayuda del IRAP y, al igual que estos instrumentos, empleará un láser para vaporizar las rocas a distancia y analizar su composición.

El rover de Tianwen 1 fue bautizado oficialmente Zhurong por la agencia espacial china (CNSA) el pasado 24 de abril. Entre los nombres finalistas se encontraban Hongyi (弘毅, «valiente/osado»), Qilin (麒麟, figura mitológica china), Nezha (哪吒, deidad popular), Chitu (赤兔, «conejo escarlata») o Qiusuo (求索, «explorador»). Finalmente ganó Zhurong —祝融— un dios del fuego en la mitología popular china.
Un modelo a escala de Zhurong (https://9ifly.spacety.com/).
Otra imagen de la HiRIC de Utopia de una zona a pocos kilómetros de la anterior. El cráter que se ve tiene 620 metros de diámetro (CNSA).
Zhurong debe convertirse en el sexto rover en recorrer Marte y en el primero de otra nación distinta a Estados Unidos. Pero, no nos engañemos, el desafío tecnológico es enorme. Marte ha demostrado ser implacable en el pasado. Mañana sabremos si China logra convertirse en el segundo país en aterrizar de forma totalmente exitosa en Marte.
Fases del aterrizaje:
- T+0: entrada atmosférica a 125 km y 4,8 km/s.
- T+4 min 44 s: despliegue del paracaídas supersónico a 1660 km/h y a más de 4 km de altura.
- T+5 min 25 s: separación del escudo térmico a 900 km/h y 3 km de altura.
- T+6 min 10 s: separación del paracaídas y el escudo térmico trasero a 340 km/h y 1,5 km de altura.
- T+7 min 30 s: aterrizaje del módulo de descenso a 3 km/h.

El módulo de descenso con Zhurong se posará en Utopia Planitia en las coordenadas 24,75º norte y 110,32º este.
En el mapa se puede ver dónde han aterrizado las distintas misiones a Marte. A la derecha del mapa, el lugar donde se espera que aterrice la nave china Tianwen-1 y a su izquierda, la mision Mars 2020, con el territorio que rastrea Perseverance.
Zhurong tiene unas de dimensiones de 2,6 x 3,0 x 1,85 metros y cuenta con seis ruedas de 30 centímetros de diámetro. Cada rueda dispone de su propio motor eléctrico independiente. Como en el caso de los rovers de la NASA o el Rosalind Franklin europeo, es capaz de girar sobre sí mismo. El rover puede desplazarse hasta 200 metros por día, pero no se espera que supere los 100 metros en un día. Zhurong dispone de paneles solares para generar electricidad, cuatro de ellos desplegables (el diseño está inspirado en las alas de una mariposa). Los dos paneles traseros son fijos, mientras que los laterales se pueden poner en posición vertical en caso necesario con el fin de que el polvo acumulado sobre ellos caiga gracias a un tratamiento especial. A diferencia de los rovers de la NASA, parece que Zhurong no lleva calefactores nucleares con el fin de sobrellevar la gélida noche marciana —sí, la gente se suele olvidar de que Sojourner, Spirit y Opportunity llevaban calefactores de plutonio-238—. A cambio, en el cuerpo central incorpora dos contenedores que almacenan calor durante el día y lo liberan por la noche aprovechando el cambio de fase de sólido a líquido del undecano (un hidrocarburo). Es la primera vez que se emplea un sistema de este tipo en una sonda espacial. Como ayuda para regular la temperatura, la superficie del rover está cubierta por aerogel. Para las comunicaciones, y como ya hemos comentado, el rover lleva una antena omnidireccional UHF y una antena de alta ganancia en banda X con un diámetro de 36 centímetros. Usando la antena UHF, Zhurong puede comunicarse una vez al día con el orbitador durante 8 o 10 minutos con una velocidad mínima de 38 kbps. El objetivo es transmitir unos 15 MB de información al orbitador cada tres días m arcianos. Gracias a un acuerdo con la ESA, existe la posibilidad de que Zhurong se comunique con la Tierra a través de la sonda Mars Express, aunque, por el momento, no lo ha hecho. La antena UHF se empleará además para comunicarse con la etapa de descenso mediante una red inalámbrica WiFi a 2,4 GHz. Zhurong se comunicará todos los días con la antena de alta ganancia para transmitir telemetría y datos meteorológicos, pudiendo enviar unos 6,25 MB cada tres días marcianos.
arcianos. Gracias a un acuerdo con la ESA, existe la posibilidad de que Zhurong se comunique con la Tierra a través de la sonda Mars Express, aunque, por el momento, no lo ha hecho. La antena UHF se empleará además para comunicarse con la etapa de descenso mediante una red inalámbrica WiFi a 2,4 GHz. Zhurong se comunicará todos los días con la antena de alta ganancia para transmitir telemetría y datos meteorológicos, pudiendo enviar unos 6,25 MB cada tres días marcianos.
Los dos cilindros de la cubierta de Zhurong guardan el sistema de regulación de temperatura mediante cambio de fase de undecano (Xinhua/Weibo). Partes de Zhurong (Eureka/China Pictorial).
Los datos enviados por el orbitador o, directamente por Zhurong, son captados en la Tierra por cinco antenas principalmente: dos antenas de 50 y 40 metros en Pekín, una antena de 40 metros en Yunnán, otra de 66 metros en Jiamusi y la nueva antena de 70 metros de Tianjin. China dispone de otra antena de 35 metros en Neuquén, Argentina, pero por el momento no está claro que participe en la recepción de datos del rover chino.
El rover cuenta con seis instrumentos: la cámara a color MSCam (Multispectral Camera), formada por una cámara con 8 filtros y un sensor de 2048 x 2048 píxeles, las cámaras de navegación NaTeCam (Navigation and Terrain Camera), el radar RoPeR (Mars Rover Penetrating Radar), basado en el que han llevado los dos rovers lunares Yutu y Yutu 2 y capaz de alcanzar entre 10 y 100 metros de profundidad (el radar, que opera en las frecuencias de 55 MHz y 1300 MHz, trabajará conjuntamente con el radar del orbitador), el espectrómetro MarSCoDe (Mars Surface Composition Detector ), que incluye un espectrómetro infrarrojo y otro láser, además de un microscopio, la estación meteorológica MCS (Mars Climate Station) y el magnetómetro RoMAG (Mars Rover Magnetometer). El espectrómetro láser LIBS (Laser-Induced Breakdown Spectroscopy) es el instrumento principal de Zhurong —es la mitad de la carga útil— y ha sido desarrollado por el Instituto de Física Técnica de Shanghai en colaboración con el CNES francés a través del IRAP (Institut de Recherche en Astrophysique et Planétologie) y tiene un diseño parecido al de los instrumentos ChemCam y SuperCam de los rover Curiosity y Perseverance, también construidos con ayuda del IRAP. Al igual que estos, empleará un láser para vaporizar las rocas a distancia y analizar su composición. Cada disparo y análisis con el espectrómetro láser dura unos 300 milisegundos y puede ce ntrarse en un área de 0,1 milímetros cuadrados. El instrumento emplea un láser de granate de itrio y de aluminio (YAG) dopado con neodimio que funciona en el rango de longitudes de onda 240-850 nanometros. El láser se refleja en un espejo que puede girar en dos ejes para cubrir cualquier dirección. Para calibrarlo, hay un blanco con distintas muestras situado bajo la antena de alta ganancia. El instrumento cuenta además con una cámara para obtener imágenes.
ntrarse en un área de 0,1 milímetros cuadrados. El instrumento emplea un láser de granate de itrio y de aluminio (YAG) dopado con neodimio que funciona en el rango de longitudes de onda 240-850 nanometros. El láser se refleja en un espejo que puede girar en dos ejes para cubrir cualquier dirección. Para calibrarlo, hay un blanco con distintas muestras situado bajo la antena de alta ganancia. El instrumento cuenta además con una cámara para obtener imágenes.
Zhurong tiene por delante una misión primaria de 92 días. El primer rover marciano chino llega a la superficie de un planeta que hasta ahora era territorio exclusivo de la NASA (no olvidemos que la agencia estadounidense opera en estos momentos tres sondas en la superficie marciana). El éxito de Zhurong demuestra a partes iguales el avance espectacular de la tecnología china en estos últimos años y la ambición de su programa espacial. China planea traer muestras de Marte en 2031, probablemente adelantándose por muy poco a la NASA y a la ESA. Cuando el país asiático anunció este plan de retorno de muestras marcianas muy pocos creyeron que sería capaz de desarrollar la tecnología para hacerlo en menos de una década. Ahora ya no hay duda alguna.
Eureka: Las primeras imágenes de Marte tomadas por el rover chino Zhurong
Las primeras imágenes de Marte tomadas por el rover chino Zhurong
19 May 2021 02:28 PM

Ahí la tenemos; es la superficie de Marte. Ya casi es un lugar familiar. Al fin y al cabo, la hemos visto muchas veces mediante las cámaras de nueve sondas espaciales. Sin embargo, esta imagen tiene una particularidad: es la primera vez que vemos la superficie del planeta rojo a través de los ojos de una sonda no estadounidense. Con ustedes, Utopia Planitia vista por el rover chino Zhurong:
Utopia Planitia vista por Zhurong. En primer plano, la rampa desplegada (CNSA/Thomas Appéré).
La parte superior de Zhurong vista por las cámaras del rover (CNSA). Situación actual del rover sobre la plataforma (CNSA/CASC). Elementos que se ven en las imágenes anteriores (CNSA/Eureka).
La zona es excepcionalmente plana, como indicaban las imágenes obtenidas por las sondas MRO y el propio orbitador Tianwen 1. Muy diferente del pedregal donde aterrizó en 1976 la famosa sonda Viking 2, también en Utopia Planitia, pero más al norte. La imagen anterior ha sido obtenida por las cámaras en blanco y negro del rover destinadas a las tareas de conducción, equivalentes a las hazcams de los rovers de la NASA, y en ella se ve el horizonte de Utopia Planitia en las coordenadas 25,1º norte, 109,9º este. En primer plano vemos la rampa de descenso del rover, correctamente desplegada. Está previsto que Zhurong baje a la superficie por esta rampa el día 22 de mayo. Mientras, el rover chino seguirá situado en la etapa de descenso sobre la que aterrizó. La Agencia Espacial China (CNSA) también ha publicado otra imagen a color, procedente de la cámara MSCam situada en el mástil del rover. En la imagen se pueden ver los paneles solares desplegados y la antena de alta ganancia, así como los blancos de calibración para los instrumentos.
China también ha publicado los primeros vídeos de la misión, en los que se puede contemplar la separación de la cápsula del orbitador. En los próximos días está previsto que se envíen vídeos del despliegue del paracaídas y de la secuencia final de aterrizaje.
El rover Zhurong (祝融号) de la misión Tianwen 1 aterrizó con éxito en Marte el pasado 14 de mayo de 2021 a las 23:18 UTC, pero no hemos podido ver las imágenes hasta el mediodía de hoy día 19 de mayo. Estos casi cinco días de espera se han hecho muy largos debido a la opacidad informativa de las autoridades chinas, que no comunicaron los planes precisos para enviar las imágenes hasta días después del aterrizaje. El retraso en el envío de estas primeras imágenes llegó a provocar una reacción de los encargados del programa espacial del país, que tuvieron que explicar que las imágenes no estarían listas hasta hoy en un intento de rebajar las expectativas del público.
Enlace de comunicaciones entre la Tierra, Zhurong y el orbitador Tianwen 1 (CCTV).
Las imágenes han tardado tanto porque se han enviado a través del orbitador Tianwen 1. Zhurong cuenta con una antena de alta ganancia que permite el contacto directo con la Tierra, pero solo con una velocidad de transferencia de datos de 16 bps, insuficiente para enviar imágenes o vídeos. Las sondas de la NASA también transmiten el grueso de sus datos a través de orbitadores, pero la agencia estadounidense cuenta en la actualidad con una flotilla de sondas propias y de otras agencias que se hallan listas en órbita para retransmitir los datos de cualquier nueva sonda en la superficie de Marte. Para complicar las cosas, el orbitador Tianwen 1 estaba situado en una órbita elíptica con un apoapsis de 60 000 kilómetros y un periodo de dos días. Después de liberar la cápsula con el rover Zhurong y comprobar que había aterrizado correctamente, Tianwen siguió en esta órbita, hasta que el 17 de mayo cambió la órbita a una nueva de 260 x 16 000 kilómetros y un periodo de 8,2 horas. En esta nueva órbita, el orbitador Tianwen 1 pasa una vez al día sobre la zona de aterrizaje de Zhurong —sí, una vez y no tres porque el planeta gira bajo la órbita—, lo que permite recabar datos del rover con más frecuencia usando el enlace de la antena UHF.
Poco después del aterrizaje, China publicó el perfil descenso de la cápsula con el rover. La cápsula se separó del orbitador a las 20:00 UTC, aproximadamente, del 14 de mayo y unas tres horas después, a las 22:54 UTC, comenzó la entrada en la atmósfera de Marte. La cápsula realizó la tercera entrada atmosférica controlada en Marte y la primera de un país diferente a EE.UU. Solo los rovers Curiosity y Perseverance han llevado a cabo este tipo de entrada. El resto de sondas marcianas ha llevado a cabo entradas balísticas no controladas, que conllevan una menor precisión en el aterrizaje (las sondas Viking realizaron una entrada no balística, pero sin controlar su trayectoria; de hecho, esta técnica aumentó la imprecisión en el caso de estas sondas). La cápsula de Zhurong usó propulsores gaseos os para mantener su posición y, luego, desplegó un flap aerodinámico para controlar la actitud del vehículo (es la primera vez que se emplea este sistema en una entrada atmosférica en otro planeta).
os para mantener su posición y, luego, desplegó un flap aerodinámico para controlar la actitud del vehículo (es la primera vez que se emplea este sistema en una entrada atmosférica en otro planeta).
Paracaídas de la cápsula de Tianwen 1 (CCTV). Paracaídas supersónico de Zhurong (Weibo). Paracaídas de Zhurong durante las pruebas en la Tierra (Xinhua).
de Zhurong durante las pruebas en la Tierra (Xinhua).
Luego se desplegó el primer paracaídas chino que se abre en la atmósfera de otro planeta, un paracaídas supersónico que redujo la velocidad del sistema a 95 m/s. El sistema de navegación óptica permitió que el ordenador eligiese la zona más adecuada para el aterrizaje mientras la nave permanecía estacionaria a cien metros de altura (la misma técnica usada en las misiones Chang’e 3, 4 y 5). Al fin, la etapa de descenso con el rover Zhurong descendió suavemente sobre Utopia Planitia. La distancia entre el punto de aterrizaje final y el anunciado inicialmente es de unos 29 kilómetros.
Diferencia entre el lugar de aterrizaje real y la planeada (Google Earth).
La entrada Las primeras imágenes de Marte tomadas por el rover chino Zhurong fue escrita en Eureka.
Eureka: El rover Zhurong ya rueda por la superficie de Marte
22 May 2021 04:50
Las ruedas del rover Zhurong de la misión Tianwen 1 tocaron al fin el suelo de Marte el día 22 de mayo de 2021 a las 02:40 UTC. El rover bajó por la rampa desplegable de la etapa de aterrizaje y se desplazó medio metro por la superficie del planeta rojo (más específicamente, 0,522 metros, para celebrar la fecha del 22/5). Aunque Zhurong tiene todav ía por delante una misión primaria de 92 días, evidentemente este hito es el más importante tras el aterrizaje. La secuencia de descenso fue filmada por las cámaras de Zhurong y de la etapa de aterrizaje, aunque, por el momento, solo se han publicado las fotos captadas por las cámaras de evasión de obstáculos delanteras y traseras —hazcams en el lenguaje de la NASA—, en blanco y negro. Curiosamente, es la primera vez que un rover descien
ía por delante una misión primaria de 92 días, evidentemente este hito es el más importante tras el aterrizaje. La secuencia de descenso fue filmada por las cámaras de Zhurong y de la etapa de aterrizaje, aunque, por el momento, solo se han publicado las fotos captadas por las cámaras de evasión de obstáculos delanteras y traseras —hazcams en el lenguaje de la NASA—, en blanco y negro. Curiosamente, es la primera vez que un rover descien de a la superficie de Marte por una rampa rígida desde la parte superior de una etapa de descenso (Sojourner y los MER lo hicieron por rampas flexibles a poca altura del suelo). China es ya oficialmente el segundo país tras Estados Unidos en hacer rodar un rover por la superficie de Marte.
de a la superficie de Marte por una rampa rígida desde la parte superior de una etapa de descenso (Sojourner y los MER lo hicieron por rampas flexibles a poca altura del suelo). China es ya oficialmente el segundo país tras Estados Unidos en hacer rodar un rover por la superficie de Marte.
La etapa de descenso de Tianwen 1 vista por Zhurong desde la superficie marciana con las cámaras hazcams traseras (CNSA).
La bajada de la etapa de aterrizaje tuvo lugar aproximadamente una semana después del aterrizaje en Utopia Planitia, el 14 de mayo a las las 23:18 UTC. Desde entonces, Zhurong ha logrado soportar las frías noches marcianas gracias a su novedoso sistema de control de temperatura mediante cambio de fase de un hidrocarburo (undecano) y se ha comunicado cada día con la Tierra en banda X y con el orbitador Tianwen 1 en UHF.
El rover chino Zhurong se hace un ‘selfie’ en Marte
Por Daniel Marín, el 11 junio, 2021.
Es una imagen espectacular, tanto por la perspectiva como por el autor. Hablamos del último selfie del rover chino Zhurong en la superficie de Marte. Los rovers Curiosity y Perseverance de la NASA nos han obsequiado con numerosos autorretratos marcianos, pero este es el primer selfie de un vehículo no estadounidense en la superficie de otro planeta. Además, mientras que los —sin duda alucinantes— autorretratos de los rovers de la NASA han sido tomados con la cámara del brazo robot y son en realidad un mosaico de múltiples imágenes, esta fotografía ha sido tomada por una cámara dejada en la superficie por el propio rover, toda una primicia. Para completar el cuadro, junto al rover vemos la etapa de descenso que le permitió aterrizar en el planeta rojo con la bandera de China desplegada, la primera bandera que «ondea» en Marte:
El rover Zhurong y la etapa de descenso de la misión Tianwen 1 en Utopia Planitia (la separación entre ambos es de unos 10 m). Se aprecian las banderas chinas de la etapa —desplegable— y la del rover (CNSA).
No cabe duda de que esta imagen pasará a la historia como una de las representativas de la exploración espacial de nuestro tiempo. Ahora bien, ¿cómo se ha tomado? Pues, como decíamos, gracias a una pequeña cámara desechable que se ha desprendido de la parte inferior de Zhurong (la imagen se tomó el 1 de junio).

Detalle de la bandera desplegable.


Detalle del pequeño cráter creado por el motor YF-36A de la etapa de descenso (CNSA).

En las huellas se aprecia el carácter 中, de 中国, o sea, China (CNSA).

La «cabeza» de Zhurong en la que se aprecian las cámaras NaTeCam a cada lado para navegación (a color) y la cámara multiespectral MSCam, en el centro. Sobre la MSCam vemos un sello de la dinastía Jin que representa el carácter para el fuego (火). En mandarín, Marte es el «astro de fuego», de ahí el nombre de Zhurong, una deidad china tradicional asociada al fuego (Weibo).

Vista de la cámara desplegable desde la Tianwen 1 (CNSA).

El panorama de la zona de aterrizaje (北: norte; 南: sur; 东: este; 西: oeste) (CNSA).
Eureka: El rover Zhurong continúa su viaje hacia el sur en Utopia Planitia
Saturday 10 July 2021
El rover chino Zhurong (祝融号) continúa su trayectoria hacia el sur en Utopia Planitia. Ya lleva 54 días en Marte y ha recorrido 300 metros. Recordemos que el ob jetivo primario de la misión era sobrevivir durante 90 días, así que Zhurong ya ha superado la mitad de su vida prevista (evidentemente, todos esperamos que pueda seguir funcionando sin problemas una vez pasado este límite administrativo). La distancia recorrida no está nada mal para ser el primer rover chino en Marte (como comparación, Perseverance, que aterrizó el 18 de febrero, ha recorrido 1,44 kilómetros hasta ahora). A este ritmo, Zhurong pronto superará la distancia recorrida por el rover Yutu 2, que ha recorrido unos 739 metros en la cara oculta de la Luna desde que aterrizó en enero de 2019 (si bien es cierto que Yutu 2 no se puede alejar demasiado de la sonda Chang’e 4).
jetivo primario de la misión era sobrevivir durante 90 días, así que Zhurong ya ha superado la mitad de su vida prevista (evidentemente, todos esperamos que pueda seguir funcionando sin problemas una vez pasado este límite administrativo). La distancia recorrida no está nada mal para ser el primer rover chino en Marte (como comparación, Perseverance, que aterrizó el 18 de febrero, ha recorrido 1,44 kilómetros hasta ahora). A este ritmo, Zhurong pronto superará la distancia recorrida por el rover Yutu 2, que ha recorrido unos 739 metros en la cara oculta de la Luna desde que aterrizó en enero de 2019 (si bien es cierto que Yutu 2 no se puede alejar demasiado de la sonda Chang’e 4).
La antena de alta ganancia de Zhurong y sus paneles solares traseros vistos en esta imagen de las cámaras NaTeCam de Zhurong publicada el 9 de julio, mirando hacia el norte. En primer plano una duna y, a lo lejos, un posible volcán de lodo (CNSA).
Zhurong aterrizó en el planeta rojo el pasado 14 de mayo y el 22 de ese mismo mes descendió de la etapa de descenso para comenzar a rodar por Marte. La CNSA publicó el primer panorama a color de la superficie de Marte tomado por Zhurong el 11 de junio, un panorama tomado mientras el rover todavía estaba situado sobre la etapa de descenso. Después de bajar a la superficie, el rover tomó imágenes de la etapa de descenso y de sí mismo mediante una cámara desplegable y, luego, prosiguió hacia el sur. El objetivo es, aparentemente, acercarse al paracaídas y al escudo térmico trasero para inspeccionarlo y, más adelante, explorar dos grandes cráteres que se hallan a 1,8 y 2.8 kilómetros, respectivamente, de la zona de aterrizaje. Se especuló en un principio que el rover podría explorar un posible «volcán de lodo» situado al norte de la zona de aterrizaje, pero, por el momento, su trayectoria es la opuesta.
estaba situado sobre la etapa de descenso. Después de bajar a la superficie, el rover tomó imágenes de la etapa de descenso y de sí mismo mediante una cámara desplegable y, luego, prosiguió hacia el sur. El objetivo es, aparentemente, acercarse al paracaídas y al escudo térmico trasero para inspeccionarlo y, más adelante, explorar dos grandes cráteres que se hallan a 1,8 y 2.8 kilómetros, respectivamente, de la zona de aterrizaje. Se especuló en un principio que el rover podría explorar un posible «volcán de lodo» situado al norte de la zona de aterrizaje, pero, por el momento, su trayectoria es la opuesta.
Recorrido de Zhurong hasta la fecha (sol 54) y su posible ruta (NASA/MRO/@Marstianwen https://twitter.com/MarsTianwen).
Además de otros, el instrumento principal de la misión es el espectrómetro láser MarSCoDe (Mars Surface Composition Detector), destinados a analizar las rocas y el regolito mediante espectroscopía LIBS (Laser-Induced Breakdown Spectroscopy), la misma técnica empleada en los instrumentos ChemCam y SuperCam que llevan los rovers Curiosity y Perseverance. El instrumento MarSCoDe está formado por cinco partes: la cabeza óptica que emite el láser y recibe la luz, el espejo móvil BPM (Bioxial Pointing Mirror), para apuntar el láser al objetivo, la electrónica, situada en el chasis del rover, los doce blancos de calibración CTA (Calibration Targets Assembly), localizados bajo la antena de alta ganancia, y el espectrómetro propiamente dicho. MarSCoDe, al igual que sus «primos» ChemCam y SuperCam, puede analizar la composición de las rocas a distancia sin necesidad de usar brazos robots o dispositivos móviles que puedan sufrir fallos. La óptica emplea un telescopio de tipo Ritchey-Chrétien de 10,6 centímetros de apertura. El láser emite en una longitud de 1064 nanometros (infrarrojo) y tiene una energía de 23 mJ. Cada pulso dura 4,5 nanosegundos y puede disparar entre una y tres veces por segundo.
Instrumento MarSCoDe de Zhurong (Xiong Wan et al.).
Funcionamiento de MarSCoDe (Xiong Wan et al.).


Perseverance (rover)
Perseverance (rover)
Parte de Mars 2020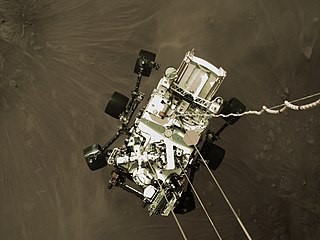
Perseverance segundos antes de aterrizar
Otros nombres
- Mars 2020 rover
- Percy
Tipo: Mars rover
Fabricante: Jet Propulsion Laboratory (Laboratorio de Propulsión a Reacción)
Especificaciones técnicas
Longitud: 2 m
Diámetro: 2,7 m
Altura: 2,2 m
Masa lanzamiento: 1025 kg
Energía: 110 W
Historial de vuelo
Fecha lanzamiento: 30 de julio de 2020, 11:50 UTC 1
Lugar lanzamiento: Cabo Cañaveral, SLC-41
Fecha aterrizaje: 18 de febrero de 2021, 20:56 UTC1
Lugar aterrizaje: 18.4447, 77.4508, Cráter Jezero
Instrumentos
Perseverance (en español, Perseverancia), apodado Percy, es un vehículo Mars rover diseñado y fabricado por el Laboratorio de Propulsión a Reacción para explorar el cráter Jezero de Marte como parte de la misión Mars 2020 del Programa de Exploración de Marte de la NASA. Fue lanzado el 30 de julio de 2020 a las 11:50 UTC1 desde Cabo Cañaveral en Florida y aterrizó en Marte el 18 de febrero de 2021 a las 20:56 UTC.2
Su diseño es casi idéntico al rover Curiosity; cuenta con siete instrumentos científicos para estudiar la superficie marciana empezando desde el cráter Jezero. También lleva a bordo 23 cámaras y dos micrófonos. En la misión también navegará el helicóptero explorador Ingenuity, que ayudará al rover Perseverance a encontrar posibles lugares para estudiar.
Diseño
El mismo equipo de ingenieros que diseñó el rover Curiosity estuvo involucrado en el diseño de Perseverance.34 Rediseñaron las ruedas del nuevo rover para que fueran más robustas que las del Curiosity, porque con el transcurso de su uso sobre la superficie del planeta sufrieron algún daño.5 En esta ocasión sus ruedas serán de una nueva aleación de aluminio, más gruesas y duraderas, con un ancho reducido y un diámetro mayor (52,5 cm) que las ruedas del Curiosity, que eran de 50,5 cm.67 A su vez, las ruedas de aluminio están cubiertas con tacos de tracción y dotadas de radios de titanio curvos para un soporte elástico.8 La combinación del conjunto de instrumentos mayores, el nuevo sistema de muestreo y almacenamiento en caché y las ruedas modificadas hacen que el Perseverance sea más pesado que su predecesor7 en un 17 % (899 kg a 1050 kg). El rover incluye un brazo robótico de cinco articulaciones que mide 2,1 m de largo. Este brazo se utilizará en combinación con una torreta para analizar muestras geológicas de la superficie marciana.9
El generador del vehículo, un MMRTG (en inglés, Multi-Mission Radioisotope Thermoelectric Generator), tiene una masa de 45 kilogramos y utiliza 4,8 kilogramos de dióxido de plutonio como fuente energética constante de calor que se convierte en electricidad. Es un motor nuclear que produce energía eléctrica en forma permanente.10 La potencia eléctrica generada es de aproximadamente 110 vatios durante el lanzamiento, con una pequeña disminución durante el tiempo de la misión.10 Se incluyen dos baterías recargables de iones de litio para satisfacer la demanda de las actividades móviles cuando aquella excede temporalmente los niveles constantes de salida eléctrica del MMRTG. El MMRTG ofrece una vida útil operativa de 14 años, y fue provisto a la NASA por el Departamento de Energía de los Estados Unidos.10 A diferencia de los paneles solares, el MMRTG proporciona a los ingenieros una gran flexibilidad para operar los instrumentos del vehículo explorador incluso de noche y durante las tormentas de polvo, y también durante la temporada de invierno.10
El ordenador del rover utiliza un RAD750 de BAE preparado para la radiación del motor nuclear; dispone de 128 megabytes de memoria volátil DRAM y opera a 133 MHz. El software de vuelo es capaz de acceder a otros 4 gigabytes de memoria NAND no volátil que se encuentran en otra tarjeta.11
Junto al Perseverance y como parte de Mars 2020 también viaja el helicóptero experimental llamado Ingenuity. Un helicóptero eléctrico alimentado con energía solar que pesa 1,8 kg, que pondrá a prueba tanto su estabilidad en el vuelo como la posibilidad de utilizarlo para hacer de avanzadilla al rover ayudando en la planificación de la ruta durante un período planificado de 30 días.12 Aparte de las cámaras no lleva ningún instrumento científico.131415
Misión
Objetivos científicos
El rover Perseverance tiene cuatro objetivos científicos:16
- Búsqueda de habitabilidad: identificar ambientes que pudieron ser capaces de albergar vida microbiana.
- Búsqueda de biofirmas: buscar signos de posible vida microbiana en esos ambientes habitables, particularmente en rocas especiales que se conoce que preservan estos signos en el tiempo.
- Almacenamiento de muestras: recoger muestras de tierra y roca, y almacenarlas en la superficie.
- Allanar el camino a los humanos: probar la generación de oxígeno en la superficie marciana a partir del CO2 atmosférico.
Nombre
Fotosw lanzamiento: https://www.infobae.com/america/fotos/2020/07/30/las-fotos-del-lanzamiento-de-la-mision-perseverance-de-la-nasa-para-buscar-vida-en-marte/
Rover en 3D: https://mars.nasa.gov/mars2020/spacecraft/rover/
Primera foto de Perseverance Rover, 18.02.2021
Thomas Zurb uchen, administrador asociado de la Dirección de Misiones Científicas de la NASA, seleccionó el nombre Perseverance tras un concurso orientado a todos los alumnos de primaria y secundaria del país que recibió un total de 28 000 propuestas y alrededor de 772 000 votos. El 5 de marzo de 2020 se anunció que el ganador había sido un estudiante de séptimo grado de Virginia, Alexander Mather. Además del honor de poner el nombre al rover el ganador y su familia fueron invitados por al Centro espacial John F Kennedy a ver el lanzamiento del rover desde la Estación de la Fuerza Aérea de Cabo Cañave
uchen, administrador asociado de la Dirección de Misiones Científicas de la NASA, seleccionó el nombre Perseverance tras un concurso orientado a todos los alumnos de primaria y secundaria del país que recibió un total de 28 000 propuestas y alrededor de 772 000 votos. El 5 de marzo de 2020 se anunció que el ganador había sido un estudiante de séptimo grado de Virginia, Alexander Mather. Además del honor de poner el nombre al rover el ganador y su familia fueron invitados por al Centro espacial John F Kennedy a ver el lanzamiento del rover desde la Estación de la Fuerza Aérea de Cabo Cañave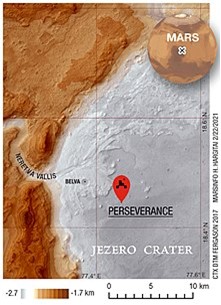 ral en Florida.171819202122 Mather escribió en su ensayo ganador:
ral en Florida.171819202122 Mather escribió en su ensayo ganador:
“Curiosidad. Perspicacia. Espíritu. Oportunidad. Si lo piensas, todos esos nombres de los anteriores rovers marcianos son cualidades que tenemos como humanos. Siempre somos curiosos y buscamos oportunidades. Tenemos el espíritu y la perspicacia para explorar la Luna, Marte y más allá. Pero, si los rovers deben ser nuestras cualidades como raza, nos hemos olvidado de lo más importante. La perseverancia. Los humanos hemos evolucionado como criaturas capaces de adaptarnos a cualquier situación, sin importar lo dura que sea. Somos una especie de exploradores, y nos vamos a encontrar con muchos imprevistos de camino a Marte. Pero podemos perseverar. Nosotros, no como una nación sino como humanos, no nos daremos por vencidos. La raza humana siempre perseverará hacia el futuro”.23
Estado actual

El rover Perseverance despegó con éxito el 30 de julio de 2020 a las 11:50 UTC (7:50 EDT) a bordo de un Atlas V de United Launch Alliance desde el Complejo de Lanzamiento 41 de la Estación de la Fuerza Aérea de Cabo Cañaveral en Florida.24
Mapa del cráter Jezero
El rover aterrizó con éxito en el cráter Jezero el 18 de febrero de 2021 a las 20:55:27 para comenzar los experimentos.25
Aterrizaje marciano – Perseverance el 18 de febrero de 2021
Elipses de aterrizaje de los rovers

Perfil del aterrizaje (detalles)

Reproducir contenido multimedia
Animación del aterrizaje del Perseverance el 18 de febrero de 2021 (detalles)
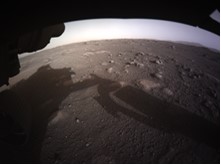
Ubicación actual
Primera imagen a color tomada por el rover
El sitio web Eyes on the Solar System de la NASA proporciona un sistema de seguimiento en tiempo real para Perseverance e Ingenuity durante su fase de viaje interplanetario de seis meses.26 El sitio interactivo proporciona controles para personalizar la experiencia de visualización.
Instrumentos científicos
Diagrama ilustrativo con la ubicación de los instrumentos científicos a bordo del rover Perseverance

Sobre la base de los objetivos científicos, se evaluaron casi 60 propuestas2728 para los instrumentos del rover y, el 31 de julio de 2014, la NASA anunció los siete que viajarían a bordo:2930
- Planetary Instrument for X-Ray Lithochemistry – PIXL (Instrumento Planetario para Litio-química en rayos X), un espectrómetro de fluorescencia de rayos X para determinar la composición elemental a una escala fina de materiales de la superficie de Marte. Investigadora principal: Abigail Allwood, Laboratorio de Propulsión a Chorro de la NASA (JPL por su sigla en inglés), Pasadena, California.3132
- Radar Imager for Mars’ Subsurface Exploration – RIMFAX (Sensor de Imágenes por Radar para la Exploración del Subsuelo Marciano), un georradar que utilizará un radar para explorar bajo tierra y conocer la geología de la zona. Investigador principal: Svein-Erik Hamran, Instituto Forsvarets Forskning, Noruega.3334
- Mars Environmental Dynamics Analyzer – MEDA (Analizador de Dinámica Ambiental Marciana), una especie de estación meteorológica que proveerá información acerca de las condiciones alrededor del rover, tales como temperatura, humedad, tamaño y forma del polvo, velocidad y dirección del viento. Investigador principal: José Antonio Rodríguez Manfredi, Centro de Astrobiología, Instituto Nacional de Técnica Aeroespacial, España.35
- El Mars Oxygen ISRU Experiment – MOXIE (Experimento ISRU de Oxígeno en Marte), un dispositivo que intentará producir oxígeno a partir de la atmósfera de Marte, la cual está compuesta por dióxido de carbono. Investigador principal: Michael Hecht, Instituto Tecnológico de Massachusetts, Cambridge, Massachusetts.36 Esta tecnología podría ser utilizada en el futuro para mantener la vida humana o hacer combustible de cohete para misiones de retorno.37
- SuperCam, un instrumento que puede detectar compuestos orgánicos presentes en rocas y regolito, a través de la mineralogía y análisis de composición química. Investigador principal: Roger Wiens, Laboratorio Nacional Los Álamos, Nuevo México.
- Mastcam-Z, un sistema de cámaras capaces de realizar acercamiento (zoom) y tomar imágenes panorámicas o espectroscópicas. Investigador principal: Jim Bell, Universidad del Estado de Arizona.
- Scanning Habitable Environments with Raman and Luminescence for Organics and Chemicals – SHERLOC (Escaneo de Ambientes Habitables con Raman y Luminiscencia para compuestos Orgánicos y Químicos), el cual examinará el espectro de muestras superficiales para conocer su composición, y posiblemente para encontrar compuestos orgánicos. Investigador principal: Luther Beegle, JPL.3839
Además de los instrumentos científicos el rover estará equipado con 23 cámaras y, por primera vez en una sonda marciana, dos micrófonos que se utilizarán durante el aterrizaje,40 la conducción y la recogida de muestras.41
Instrumentos propuestos para el rover del Mars 2020
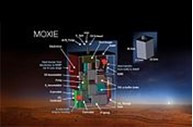


A pesar de que varios de estos instrumentos resultan ser nuevas tecnologías, Mastcam-Z nació de otra ya probada en Marte. Versiones anteriores de este instrumento viajaron en el Curiosity, al igual que en sus predecesores Spirit y Opportunity, que aterrizaron en el planeta rojo en el año 2004.
“Envía tu nombre a Marte”
La campaña de la NASA “Envía tu nombre a Marte” (en inglés, “Send Your Name to Mars”) invitó a personas de todo el mundo a enviar su nombre a Marte a bordo del próximo rover. Los nombres fueron grabados utilizando un chorro de electrones en tres chips de silicio, junto con los ensayos de los 155 finalistas del concurso para nombrar al rover. Después se montaron en una placa de aluminio junto con un grabado que muestra la Tierra, el Sol y Marte, que fue acoplada al rover el 26 de marzo de 2020.42
Homenaje al personal médico
Perseverance, que fue lanzado durante la pandemia de COVID-19, usó una placa a modo de agradecimiento a los trabajadores de la salud que ayudaron durante la pandemia, una placa de 8 × 13 cm (3,1 x 5,1 pulgadas) con el símbolo de la Vara de Esculapio. El gerente del proyecto, Matt Wallace, dijo que esperaba que las generaciones futuras que vayan a Marte puedan apreciar a los trabajadores de la salud que estuvieron en la primera línea contra el COVID-19.43
Hangar de montaje
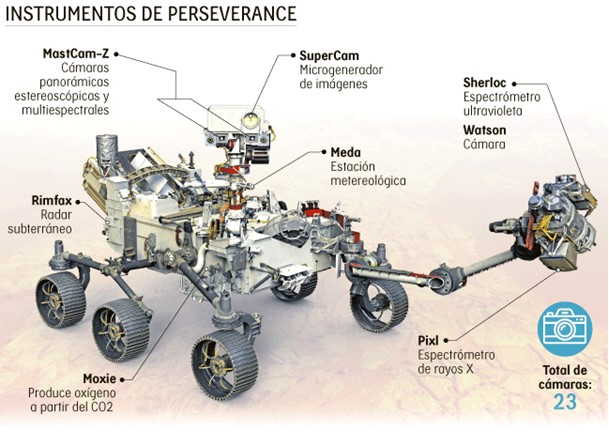
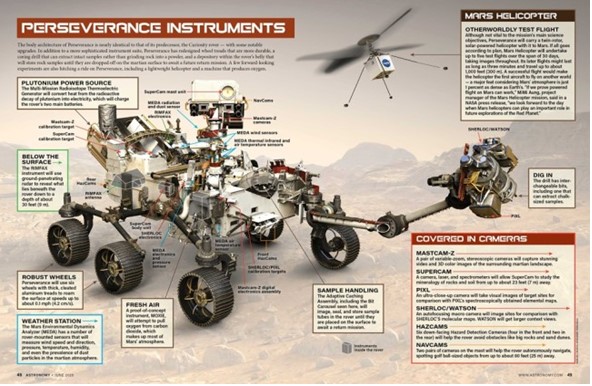

Lanzamiento

Amartizaje del módulo

Punto elegido en el Cráter Jezero
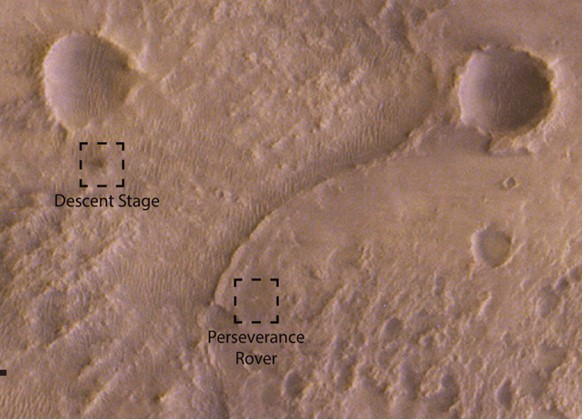
Lugar del módulo y del rover

Módulo completo de amartizaje
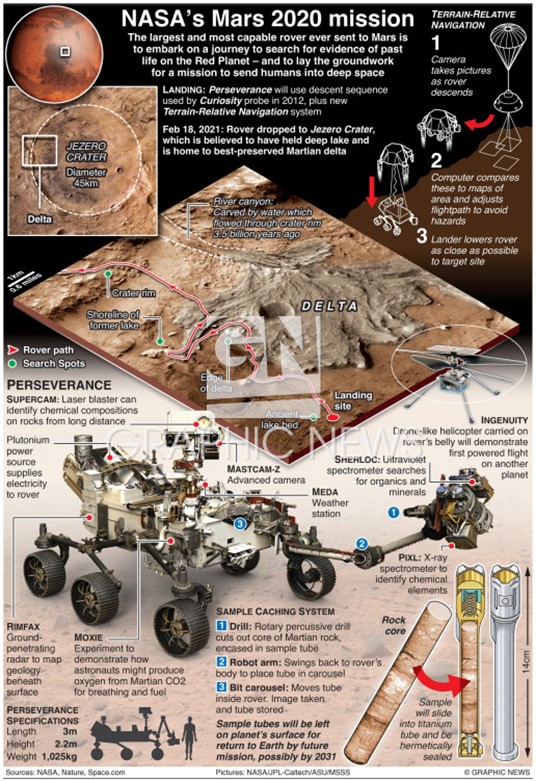
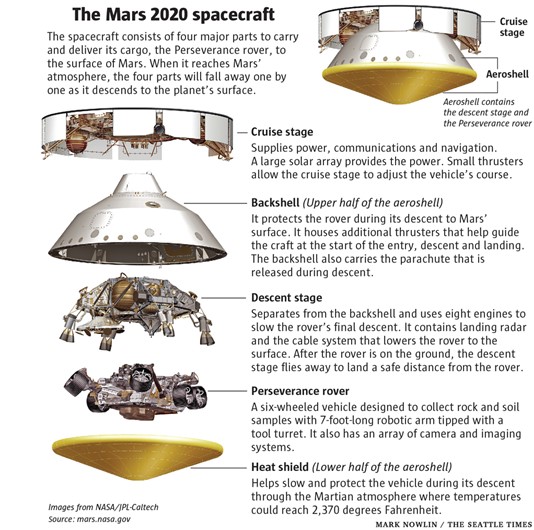
Sinopsis general de la misión.
El mensaje oculto de la NASA en el paracaídas del ‘rover’ Perseverance
El patrón rojo y blanco del dispositivo esconde una frase en clave de la agencia espacial estadounidense
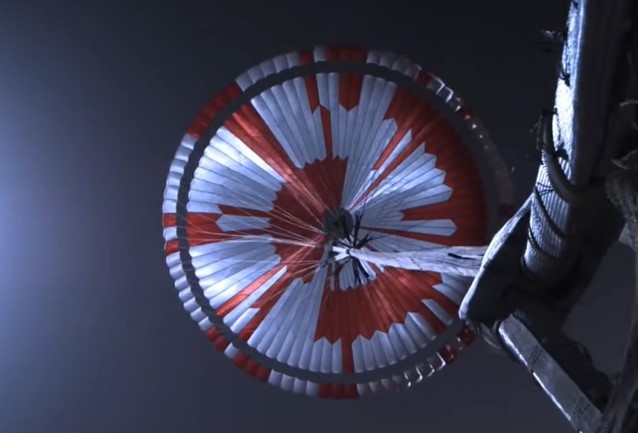
Los usuarios de las redes sociales no tardaron en encontrarle un significado al estampado rojo y blanco del paracaídas del Perseverance.La RazónNASA
A las 21:48 horas del pasado 18 de febrero, el rover Perseverance entró en los “siete minutos de terror” antes de tomar tierra. En ese momento, la nave atravesó la atmósfera de Marte a unos 19.500 kilómetros por hora y, tres minutos antes del aterrizaje, desplegó su paracaídas a una velocidad supersónica. Cuando todo el mundo estaba pendiente del éxito de la misión, varias personas se fijaron en un pequeño detalle que escondía el dispositivo que ayudó al aparato a descender a la superficie marciana.
Su patrón rojo y blanco no era ni mucho menos simétrico, por lo que algunos usuarios de Reddit y Twitter dedujeron que la NASA había ocultado un mensaje. En el dibujo del paracaídas se pueden observar tres círculos concéntricos que corresponden a cada una de las palabras de la frase secreta de la agencia espacial y un anillo exterior que incluye unas coordenadas.
El mensaje está cifrado en código binario, un sistema que utiliza unos y ceros utilizado habitualmente en informática y telecomunicaciones. De esta forma, los tres círculos de la parte inferior deletrean la frase “Dare Mighty Things” (atrévete con cosas poderosas, en español), el lema utilizado por el Laboratorio de Propulsión a Chorro (JPL) de la NASA. La parte exterior, en binario, conforma las coordenadas 34°11′58″N 118°10′31”W, el código de geolocalización para este laboratorio. “¡Parece que Internet ha descifrado el código en unas 6 horas! Oh internet, ¿hay algo que no puedas hacer?”, bromeó Adam Steltzner, jefe de Ingeniería del Perseverence, en Twitter.
El artífice de este diseño f ue Ian Clark, ingeniero de sistemas de Mars 2020 Perseverance. Este eslogan es una cita extraida del discurso “Strenuous Life” del expresidente estadounidense Teddy Roosevelt: “Es mucho mejor atreverse a cosas poderosas, ganar gloriosos triunfos, aunque esté marcado por el fracaso … que estar entre los pobres espíritus que no disfrutan ni sufren mucho, porque viven en un crepúsculo gris que no conoce la victoria ni la derrota”.
ue Ian Clark, ingeniero de sistemas de Mars 2020 Perseverance. Este eslogan es una cita extraida del discurso “Strenuous Life” del expresidente estadounidense Teddy Roosevelt: “Es mucho mejor atreverse a cosas poderosas, ganar gloriosos triunfos, aunque esté marcado por el fracaso … que estar entre los pobres espíritus que no disfrutan ni sufren mucho, porque viven en un crepúsculo gris que no conoce la victoria ni la derrota”.
Un homenaje a la lucha contra la Covid-19
El diseño del paracaídas no es el único mensaje oculto del Perseverance. El rover también ha llevado a Marte un homenaje a las víctimas de la pandemia. El vehículo incorpora una placa de aluminio con u na imagen de la Vara de Asclepio, el símbolo de la curación y la medicina en la antigua Grecia.
Archivado en:
El equipo de la NASA trabaja en identificar qué es exactamente y de dónde proviene, ya que a simple vista parece un trozo de plástico. No es la primera vez que se ven escombros en Marte, debido a que Ingenuity tomó fotografías de un objeto con forma de spaghett

El objeto en forma de fideo fue fotografiado por el rover Perseverance el pasado 12 de juliode 2022. Foto: NASA
El pasado 12 de julio el rover captó un extraño objeto en forma de espagueti, ya que éste tiene algunas fibras y tiras que lo asemejan a un remolino de fideos; sin embargo, podría tratarse de basura espacial.
Yutu-2
Yutu-2
Es un rover que fue lanzado por la nave Chang’e 4, de cuyo programa forma parte.
Chang’e 4 (chino simplificado: 嫦娥四号) es una misión de exploración lunar de nacionalidad china, lanzada el 7 de diciembre de 2018, que incorpora un orbitador, un módulo de aterrizador robótico y un rover. Es el segundo módulo lunar y explorador lunar de China. Se construyó como copia de seguridad de la Chang’e 3, como Chang’e 2 fue igualmente para Chang’e 1. Tras el exitoso aterrizaje de la misión Chang’e 3, la configuración de Chang’e 4 va equipada para cumplir nuevos objetivos científicos. Al igual que sus predecesores, la nave espacial lleva el nombre de la diosa de la luna china.
Chang’e 4 fue lanzada por un Larga Marcha 3B el 7 de diciembre de 2018. Entró en órbita de aterrizaje el 30 de diciembre de 20184, alunizando con éxito el 3 de enero de 2019, por lo que ha sido el primer alunizaje en el lado oculto de la Luna.5
Los instrumentos de los que va provisto el Rover son:
- Cámara panorámica
- Georradar
- Espectrómetro infrarrojo
- Active Source Hammer (ASH) para experimentos sísmicos de fuente activa
- Energetic neutral atom: Analizador pequeño avanzado para neutrales (ASAN), proporcionado por el Instituto Sueco de Física Espacial (IRF). Revelará cómo el viento solar interactúa con la superficie lunar y quizás incluso el proceso detrás de la formación del agua lunar.14


El rover de la Chang’e 4 antes del lanzamiento (Xinhua).


Más inteligente que su predecesor
El director ejecutivo del proyecto de sondeo Change-4 de la CAST, Zhang He, ha detallado que “durante la noche en la Luna, las temperaturas pueden bajar a aproximadamente 180 grados celsius. Durante la misión Change-3, el centro de control terrestre ordenó que el vehículo permaneciera inactivo cada noche. Una vez que el sol saliera, Yutu se despertaría automáticamente, pero necesitaba un control sobre el terreno para indicarle que iniciara el modo de trabajo”.
Sin embargo, Yutu-2 entrará automáticamente en el estado inactivo según el nivel de luz solar. “Hicimos este ajuste porque la comunicación entre el control de tierra y la sonda en la cara oculta de la Luna no es tan conveniente como la comunicación con Change-3“, ha añadido Zhang.
El primer rover lunar de China, Yutu, sufrió una falla mecánica después de conducir unos 114 metros hace cinco años. “Cómo resolver ese problema para que no volviese a suceder fue el principal desafío en el desarrollo del nuevo rover”, ha indicado Zhang.
La nave Chang’e 4 se posó en la cuenca Aitken, que con 2500 kilómetros de diámetro es uno de los mayores cráteres de impacto del Sistema Solar. De las entrañas del módulo de aterrizaje salió el robot Yutu-2, que recorrió una pequeña zona de este enorme cráter dentro del cual hay muchos otros —la misión se encuentra en el Von Kármán, con 180 kilómetros de lado a lado— y encontró restos de un antiguo océano de lava que cubría todo el satélite.
La Luna se formó hace unos 4.500 millones de años, cuando un planeta del tamaño de Marte —Theia— chocó contra la Tierra y la desintegró durante unas horas. Un fragmento de Tierra se fundió con los restos de Theia y formó la Luna, que durante un tiempo estuvo cubierta por ese océano de roca fundida del que Yutu encontró indicios el año pasado.

La depresión Aitken es uno de los mayores y más antiguos cráteres del sistema solar. En imagen de la Luna, la depresión Aitken está marcada en azul y violeta. A su alrededor, las zonas más elevadas se ven en rojo y amarillo.
Ahora salen a la luz los datos del radar de alta frecuencia que el vehículo lleva instalado y que es el primero que se ha usado nunca para aclarar la composición detallada del subsuelo de esta zona.
“Es la primera vez que obtenemos una estructura detallada de los diferentes estratos del terreno en la cara oculta de la Luna”, explica Yan Su, investigadora de los Observatorios Nacionales de China y coautora del estudio, publicado en Science Advances. La científica resalta que este tipo de estudios ayudan a conocer mejor la historia de los impactos de meteoritos y volcanismo en la Luna y pueden desvelar reservas de minerales de interés como la ilmenita, “un recurso importante” del que pueden extraerse hierro, titanio y oxígeno para abastecer la exploración humana de la Luna.
La sonda Chang”E 4 lleva en su interior un pequeño robot explorador, YuTu 2.
Un día en la cara oculta dura unos 14 días terrestres. La noche dura otros tantos y se alcanzan temperaturas de 170 grados bajo cero, por lo que el vehículo explorador, que funciona con paneles solares, deja de operar. Los datos publicados hoy corresponden a los dos primeros días lunares de la misión —ahora ya va por el 15º—, durante los cuales sus antenas lanzaron ondas de radio contra el suelo que penetraron en el terreno, rebotaron en los accidentes geográficos y desvelaron su composición detallada.
“Uno de los resultados más destacados es la transparencia del terreno”, resalta Elena Pettinelli, geofísica de la Universidad de Roma Tres, cuyo equipo ha colaborado en el análisis de los datos de la misión. “En la Tierra, con una frecuencia similar [500 megahercios] solo podríamos penetrar dos metros debido a la presencia de agua, que atenúa la señal”, explica la investigadora.
Las capas de la Luna
El radar muestra que el interior de la cara oculta de la Luna está hecho de una primera capa de terreno muy fino que llega hasta los 12 metros de profundidad. Son viejas rocas literalmente machacadas por la lluvia de meteoritos y el efecto de la radiación solar. Esta composición ha facilitado que las ondas del radar penetren mucho más que en la cara visible, donde otro robot chino hizo el mismo experimento alcanzando una profundidad de solo 10 metros. Debajo de esa primera capa hay un segundo nivel que alcanza hasta los 24 metros y donde aparecen grandes rocas de entre medio metro y dos metros de largo. Más abajo y hasta donde han podido llegar las ondas del radar —unos 40 metros— hay terreno más mezclado con capas de tierra fina y rocas.

Una estratigrafía que muestra las capas geológicas detectadas por el radar de Yutu-2CLEP/CRAS/NAOC
Los investigadores creen que lo que ven en la segunda capa son los escombros levantados hace unos 3200 millones de años por el meteorito que formó el cráter Finsen, de 72 kilómetros de diámetro y cuyo borde se toca con el Von Kármán, en el que está el robot chino. En el tercer nivel se encuentran restos de impactos más antiguos. El propio Von Kármán se formó hace unos 3600 millones de años.
Los resultados de la misión suponen uno de los mayores éxitos hasta la fecha del programa espacial chino. Ningún otro país ha viajado con éxito a este lado del satélite y ha logrado mantener una misión durante tanto tiempo, para cuya comunicación hubo que lanzar un satélite de comunicaciones que orbita la Luna y envía los datos de la misión a la Tierra. “Esta es una tecnología que otras naciones quieren desarrollar y ellos han sido los primeros en lograrlo”, destaca Bob Grimm, experto en geología lunar del Instituto de Investigación del Suroeste (EE UU). “Los resultados obtenidos en la cara visible y ahora en la oculta demuestran que la penetración del radar depende en parte de la abundancia de hierro y titanio en el subsuelo”, añade.
“Es la primera vez en la historia que se estudia el interior de la Luna con un radar de penetración de suelo”, explica Jorge Pla-García, astrofísico del Centro de Astrobiología, en Madrid. “Antes solo se habían hecho mediciones remotas por satélites, una con el Apolo 17 [1972] y otra con Kaguya [Japón, 2007], ambas con menor resolución. Uno de los descubrimientos interesantes es que se pensaba que el Von Kármán estaba lleno de los restos del impacto que formó este cráter, pero ahora vemos que casi todo se llenó con restos de otros impactos”, resalta.
En este punto los científicos de la misión reconocen un contratiempo. Para penetrar más y determinar a qué profundidad está el manto lunar en esta zona hay que usar el radar de baja frecuencia, capaz de alcanzar cientos de metros bajo el suelo. Por desgracia, su diseño no fue el mejor, ya que el propio cuerpo metálico del vehículo genera interferencias que, por ahora, no permiten aclarar si las imágenes que llegan del subsuelo son reales o simple ruido. Los responsables esperan poder limpiar las mediciones para saber qué se esconde a cientos de metros bajo la cara oculta del satélite.
La hazaña china tuvo un gran eco y fue recogida por medios de comunicación de todo el mundo. Pero, tras la resaca y después de haber demostrado el éxito de la parte tecnológica de la misión, ha llegado para Yutu 2 el momento de hacer ciencia.
Ocho instrumentos para hacer ciencia
Con sus cuatro instrumentos a bordo, el robot se moverá por la superficie para estudiar la interesante geología de esta región lunar, bombardeada a lo largo de su historia por el impacto de numerosos asteroides, sobre todo, durante las primeras etapas del sistema solar que, según se cree, comenzó a formarse hace unos 4.600 millones de años.
Esta misión robótica, compuesta también por la sonda Chang’e 4, dotada de otros cuatro instrumentos, debe hacer también diversos experimentos para entender mejor cómo se desarrolla la vida en la Luna de cara a futuras misiones tripuladas. Entre otras tareas, se va a estudiar cómo afecta el ambiente lunar al crecimiento de vegetales y gusanos de seda.
El director del departamento de exploración lunar y del espacio de la Academia China de Ciencias (CAS), Zou Yongliao, ha mostrado su confianza en que Yutu 2 “hará descubrimientos científicos sorprendentes”, pues “la cara oculta de la luna tiene características muy especiales y nunca ha sido explorada in situ“, informa Efe.
Astronomía desde la cara oculta
En concreto, sus instrumentos le permitirán detectar la composición de minerales, medir la radiación para estudiar el entorno que hay en la cara oculta y realizar observaciones de radioastronomía de baja frecuencia. Según ha explicado la CNSA en un comunicado, el lado oculto de la Luna es una zona libre de interferencias de la Tierra. Por ello, sostiene la agencia espacial china, este emplazamiento es idóneo para que los astrónomos puedan estudiar los orígenes y evolución de las estrellas y las galaxias.
Dos de los instrumentos de la misión han sido desarrollados en colaboración con Suecia, Alemania y Holanda. En los últimos años, China ha incrementado su cooperación con los países de la Agencia Espacial Europea (ESA) y con Rusia. Sin embargo, el recelo de EEUU a que formara parte de la Estación Espacial Internacional (ISS), como deseaba China, hizo que el gigante asiático tuviera que construirse en 2011 su propia estación espacial, Tiangong-1 (palacio celestial) que, por cierto, dio un susto el pasado abril cuando, al quedar en desuso, cayó de forma descontrolada en la Tierra, afortunadamente, sin causar ningún daño. Ahora ha demostrado que puede tratar de tú a tú tanto a la NASA como a las otras grandes agencias espaciales.
Y es que en los últimos 15 años, China ha hecho grandes progresos en su programa espacial, demostrando que quiere ser una de las grandes potencias. Desde que en 2003 mandó al primer hombre al espacio, Yang Liwei, a bordo de la nave Shenzhou 5, 11 taikonautas han formado parte de misiones espaciales.
Por lo que respecta a su programa lunar, Chang’e, las dos primeras naves orbitadoras fueron lanzadas entre 2007 y 2010. La primera que alunizó fue la Chang’e 3, en diciembre de 2013, y esta semana lo ha vuelto a lograr con la Chang’e 4. Está previsto que la siguiente, la Chang’e 5, despegue en diciembre de este año. Su objetivo no será sólo alunizar, sino recoger muestras y traerlas de vuelta a la Tierra. Si lo consigue, volverá a lograr un hito espacial, pues las únicas rocas lunares que hay en nuestro planeta son las recogidas por los astronautas de la NASA que viajaron al satélite entre 1969 y 1972 y, en menor cantidad, por tres sondas soviéticas del programa Luna en los años 70.
El rover chino Yutu-2 comienza su misión en la cara oculta de la Luna 09/01/2019 | Madrid
La Administración Nacional del Espacio de China (ANEC) ha anunciado que el rover de la sonda Change-4, que llegó la semana pasada a la cara oculta de la Luna por primera vez en la historia, se ha separado del módulo y ha descendido a la superficie lunar.
El rover, llamado Yutu-2, es, según los científicos chinos, más ligero, más inteligente, más fuerte y más confiable que su predecesor. En este sentido, los investigadores esperan que el aparato viaje más lejos para enviar más imágenes del terreno desconocido.
El jefe del diseño de la sonda Change-4 de la Academia China de Tecnología Espacial (CAST), Jia Yang, ha explicado que “Yutu-2 de 135 kilogramos es dos kilogramos más ligero que su predecesor. La razón principal de la reducción de peso es la eliminación de un brazo robótico y su reemplazo por un instrumento desarrollado por científicos suecos para analizar el entorno de radiación en la superficie lunar”.
Al igual que Yutu, que aterrizó en la Luna a fines de 2013, el nuevo rover lleva un radar de penetración en el subsuelo para detectar la estructura de la Luna cerca de la superficie y un espectrómetro infrarrojo para analizar la composición química de las sustancias lunares. El sistema tiene una vida útil de tres meses y puede atravesar rocas de hasta 20 centímetros a una velocidad máxima de 200 metros por hora.
Una imagen tomada por el módulo de alunizaje de la sonda ‘Chang’e 4’ muestra al explorador que se desplazará por la superficie lunar para recoger datos

El robot ‘Yutu-2’ descendiendo del módulo de alunizaje, en una foto tomada en el lado oculto de la Luna.
La agencia espacial china, CNSA, mostró las primeras imágenes del robot Yutu-2 avanzando por la superficie del cráter Von Kármán, una formación de 186 kilómetros de diámetro cubierta de polvo gris. Allí, comenzará a realizar el primer análisis sobre el terreno del lado oculto de la Luna. El Yutu-2, que comparte buena parte de su tecnología con el primer Yutu, que llegó a la Luna en 2013 con la misión Chang’e 3, espera tener una vida más longeva que aquella máquina, que se averió después de recorrer poco más de 100 metros.
Yutu-2 y el módulo de alunizaje de la sonda Chang’e 4 tienen cuatro instrumentos cada uno, con los que pretenden estudiar en detalle la superficie y el subsuelo del cráter. Dentro del módulo que no se moverá habrá también un experimento biológico que incluye huevos de gusano de seda y semillas de varias plantas. El objetivo de este trabajo es comprender cómo crecen estos seres vivos en un entorno con una gravedad tan débil como la lunar.
El nombre de Yutu-2 (que se traduce como Conejo de Jade-2) hace referencia a una leyenda china. Según explica la agencia de noticias Xinhua, Yutu es el conejo blanco mascota de Chang’e, la diosa de la Luna que prestó su nombre a la misión lunar china. La leyenda cuenta que Chang’e, después de tragarse una píldora mágica, tomó a su mascota y voló hacia la Luna, donde se convirtió en una diosa y desde entonces ha vivido con el conejo de jade blanco.
el conejo de jade blanco.
Yutu-2 se enfrenta a mayores desafíos que Yutu. Su lugar de aterrizaje, la cuenca Aitken, es el segundo mayor cráter del sistema solar. Al igual que su predecesor, el Yutu-2, capaz de soportar presión al vacío, radiación intensa y temperaturas extremas, está equipado con cuatro cargas científicas, incluidas una cámara panorámica, un espectrómetro para captar imágenes infrarrojas y dispositivos de medición de radar para obtener imágenes de la superficie de la Luna y analizar el suelo y la estructura lunar.
Las primeras imágenes de la cara oculta de la Luna captadas por la ‘Chang’e 4’
El robot chino Yutu-2 recorre la cara oculta de la Luna para mostrar de qué está hecha

2 de marzo de 2020-07:49
El robot Yutu-2 visto desde la sonda Chang”E 4, en el crater Aitken de la Luna.
Un pequeño robot chino desvela, gracias a un radar que le permite explorar el subsuelo lunar, de qué está hecho el interior de la cara oculta de la Luna. El nivel de detalle no tiene precedentes y ha permitido reconstruir el pasado de nuestro satélite y localizar los escombros del impacto de un asteroide que sucedió hace 3200 millones de años, cuando la vida en la Tierra apenas empezaba a surgir.

El 3 de enero de 2019 China se convirtió en el primer país en aterrizar con éxito en la cara no visible de la Luna, un territorio repleto de cráteres hasta ahora inexplorado por la imposibilidad de mantener una comunicación directa con la Tierra.
Cara oculta de la Luna: primeras imágenes de la sonda china Chang’e-4

Yutu-2 supera su vida útil y ya es el rover que más ha sobrevivido en la Luna
Rover en la Luna. Foto: CASC.
07/02/2020 | Madrid 1
El rover lunar chino Yutu-2, que puede atravesar rocas de hasta 20 centímetros a una velocidad máxima de 200 metros por hora, ya ha sobrepasado su vida una vida útil de tres meses, convirtiéndose en el rover que más ha sobrevivido en la Luna. El sistema que llegó en la sonda Change-4 en enero de 2019, ha recorrido 367,25 metros en su misión en la cara oculta de la Luna para realizar una exploración científica.
Durante la misión científica, tanto el módulo de aterrizaje como el rover de la sonda Change-4 terminaron su trabajo el 14º día lunar y cambiaron al modo inactivo durante la noche lunar. El 14º día lunar, Yutu-2 continuó moviéndose a lo largo de la ruta planificada. Los instrumentos científicos en el módulo de aterrizaje y el rover funcionaron según lo planeado.
El detector de radiación de neutrones y el radio espectrómetro de baja frecuencia en el módulo de aterrizaje funcionaron normalmente y adquirieron datos científicos. En el vehículo explorador, el espectrómetro de infrarrojo cercano, la cámara panorámica, el detector de átomos neutros y el radar lunar llevaron a cabo la exploración científica según lo previsto.

Al igual que Yutu, que aterrizó en la Luna a fines de 2013, el nuevo rover lleva un radar de penetración en el subsuelo para detectar la estructura de la Luna cerca de la superficie y un espectrómetro infrarrojo para analizar la composición química de las sustancias lunares.China planea lanzar la sonda Change-5 en 2020 para traer muestras lunares a la Tierra. Change-5 incluirá un módulo de aterrizaje, un orbitador, un ascendente y un regresador. Las tareas clave de la misión serán la recolección de muestras lunares, el despegue de la luna, el encuentro y el atraque en la órbita lunar y el reingreso a alta velocidad a la atmósfera de la Tierra.

El rover chino Yutu-2 continúa descubriendo los secretos del lado oculto de la Luna
REPÚBLICA/EP | 30/04/2020
El rover lunar chino Yutu-2 (Conejo de Jade), ha recorrido 447,68 metros en el lado opuesto de la luna relazando exploración científica del territorio, tras cubrir una distancia adicional de 27 metros en su decimoséptimo día lunar.
Tanto el módulo de aterrizaje como el rover de la sonda Chang’e-4 han cambiado al modo inactivo durante la noche lunar debido a la falta de energía solar, según el Centro de Programa de Exploración y Espacio Lunar de la Administración Nacional del Espacio de China, citada por Xinhua.
La sonda Chang’e-4 de China, lanzada el 8 de diciembre de 2018, realizó el primer aterrizaje suave en el Cráter Von Karman en la Cuenca del Polo Sur-Aitken en el extremo más alejado de la luna el 3 de enero de 2019.
Como resultado del efecto de bloqueo de marea, el ciclo de revolución de la Luna es el mismo que su ciclo de rotación, y el mismo lado siempre mira hacia la Tierra. Un día lunar equivale a 14 días en la Tierra, y una noche lunar tiene la misma longitud. Durante el decimoséptimo día lunar, Yutu-2 continuó su exploración hacia el noroeste del sitio de aterrizaje de la sonda y obtuvo un nuevo lote de datos de detección científica.
Yutu-2 ha trabajado mucho más tiempo que su vida de diseño de tres meses, convirtiéndose en el rover lunar de más larga duración en la luna.
Las tareas científicas de la misión Chang’e-4 incluy en realizar observaciones de radioastronomía de baja frecuencia, inspeccionar el terreno y los accidentes geográficos, detectar la composición mineral y la estructura superficial lunar superficial y medir la radiación de neutrones y los átomos neutros.
en realizar observaciones de radioastronomía de baja frecuencia, inspeccionar el terreno y los accidentes geográficos, detectar la composición mineral y la estructura superficial lunar superficial y medir la radiación de neutrones y los átomos neutros.
682 metros recorridos por la cara oculta de la Luna por el rover chino desde su llegada hace más de 800 días
23 Marzo 2021
Un día y una noche lunares equivalen cada uno a unos 14 días en la Tierra. El rover chino YuTu-2, como parte de la misión Chang’e 4, lleva 800 días terrestres.
El odómetro del rover chino YuTu-2 suma ya 682,77 metros, según el Centro de Exploración Lunar y Programa Espacial de la Administración Nacional del Espacio de China.
Chang’e 4
Para atenuar el frío de la noche lunar, tanto el rover como el aterrizador incorporan un generador de radioisótopos de plutonio-238, de fabricación rusa. Desprende 120 vatios de potencia térmica, lo que permite calentar los instrumentos durante la noche, por medio de un líquido conductor circulante.
Tanto el vehículo como su módulo de aterrizaje cambiaron el pasado fin de semana al modo inactivo para la noche lunar después de funcionar de manera estable durante el 28º día lunar de estancia.
A través de un análisis de los datos de detección obtenidos por la sonda Chang’e-4, los investigadores han realizado una serie de descubrimientos científicos que incluyen la composición mineral y la historia de la evolución topográfica y geológica del lugar de aterrizaje.
El Chang’e 4 fue diseñado originalmente para funcionar durante un año y Yutu 2 durante tres meses. Efectivamente, ambas embarcaciones ya han excedido ese tiempo pero también ambas siguen funcionando correctamente.


El rover Yutu 2 de China está a punto de ‘despertar’ en el otro lado de la luna
Por Andrew Jones
El rover Yutu-2 de China se despertará en el lado opuesto de la luna este mes de mayo. (Crédito de la imagen: CLEP / CNSA)
El valiente rover Yutu 2 de China está a punto de despertar y continuará explorando el lado lejano de la luna mientras la nación trabaja para aterrizar un rover en Marte este mes de mayo.
El rover, que se lanzó con la misión Chang’e 4 , aterrizó en el lado opuesto de la luna en enero de 2019 y recientemente completó su 29 ° día lunar de actividades, dijo el Proyecto de Exploración Lunar de China (CLEP) el 23 de abril.
El módulo de aterrizaje y el rover impulsados por energía solar de la misión entraron en estado inactivo el 19 de abril, hora de Beijing, justo antes de la puesta del sol. Las dos naves espaciales estarán protegidas de temperaturas tan frías como menos 290 grados Fahrenheit (menos 180 grados Celsius).
El rover y el módulo de aterrizaje se despertarán de su hibernación a principios de mayo después del amanecer sobre la nave espacial en el cráter Von Kármán.
Yutu 2 ha estado avanzando hacia el noroeste de su punto de aterrizaje en el cráter Von Kármán y hasta ahora ha viajado un total de 2,325 pies (708,9 metros), recopilando datos a lo largo del camino con sus cámaras panorámicas, radar de penetración lunar (LPR) y un espectrómetro de imágenes visible e infrarrojo cercano.
El de seis ruedas y 310 libras. (140 kilogramos) el rover ha descubierto una serie de capas distintas de roca debajo de la superficie lunar, que los científicos creen que fue creada por el vulcanismo y los intensos impactos de asteroides. El área que ha observado también incluye material procedente de cráteres cercanos como el cráter Finsen, según un documento presentado durante la Conferencia de Ciencias Lunar y Planetaria en marzo.
El documento afirma que el LPR podría ser un instrumento crucial para determinar la historia de la evolución de la superficie de la luna y rastrear las fuentes de los materiales de la superficie descubiertos por Yutu 2.
El rover está operando dentro de la antigua cuenca del Polo Sur-Aitken en el lado lunar lejano, una cuenca de impacto masivo. Los científicos piensan que el evento que creó la cuenca pudo haber excavado roca debajo de la corteza lunar y esperan que dicho material pueda ayudar a desentrañar los secretos de la formación de la luna.
Yutu 2 también se ha encontrado con una serie de fragmentos de roca que contienen vidrio creados o producidos por impactos más pequeños en la superficie lunar, algunos de los cuales han generado un gran interés .
Una vez que el rover se despierte en mayo, continuará su viaje hacia el noreste, donde los científicos esperan encontrar roca basáltica de un área cercana para proporcionar más información sobre la historia de la superficie lunar local.
Pero Yutu 2 no es el único rover de China que está progresando. A mediados de mayo, el recién nombrado rover Zhurong de China , parte de la misión nacional Tianwen 1, intentará aterrizar de forma segura en Utopia Planitia en Marte. El rover Zhurong de seis ruedas, impulsado por energía solar, lleva algo de tecnología y lecciones derivadas de Yutu 2, pero es más grande con 530 libras. (240 kilogramos) y lleva más instrumentos científicos.

Este mapa muestra la ruta que Yutu 2 en un año. El mapa fue producido por el historiador y cartógrafo de exploración espacial Phil Stooke.
Para saber más: https://enciclopediauniverso.com/el-universo-es-enorme/change-4-celebra-un-ano-al-otro-lado-de-la-luna/
Lunokhod 1
Lunokhod 1 (Луноход, luna caminante en Rusia; Аппарат 8ЕЛ № 203, vehículo 8ЕЛ№203) fue el primero, de los dos no tripulados, vehículos lunares que aterrizó en la Luna, por la Unión Soviética como parte de su programa Lunokhod. La Luna 17 nave espacial llevado Lunokhod 1 a la Luna en 1970. Lunokhod 1 fue el primer robot “Rover” a control remoto para moverse libremente a través de la superficie de un objeto astronómico más allá de la Tierra. Lunokhod 0 (No.201), la antigua y de primer intento de hacerlo, puso en marcha en febrero de 1969, pero no logró alcanzar la órbita.
Descripción Rover

Lunokhod 1 fue un vehículo lunar formado de un compartimento-bañera como con una gran tapa convexa en ocho ruedas accionados de forma independiente. Su longitud era de 2,3 metros (7 pies 7 pulgadas). Lunokhod estaba equipado con una forma de cono de la antena, una altamente direccional antena helicoidal, cuatro cámaras de televisión, y los dispositivos extensibles especiales para probar el suelo lunar para la densidad del suelo y propiedades mecánicas. Un espectrómetro de rayos X, un telescopio de rayos X, rayos cósmicos detectores, y un láser de dispositivo también fueron incluidos. El vehículo fue alimentado por baterías que se recargan durante el día lunar por una célula solar de matriz montada en la parte inferior de la tapa. Para ser capaz de trabajar en vacío un lubricante especial con base de fluoruro fue utilizado para las partes mecánicas y los motores eléctricos (uno en cada cubo de la rueda) fueron encerrados en recipientes presurizados. [1] [2] Durante las noches lunares, la tapa se cerró y el polonio-210 unidad de calefacción de radioisótopos mantuvo a los componentes internos de la temperatura de funcionamiento. Lunokhod tenía la intención de operar a través de tres días lunares (aproximadamente 3 meses de la Tierra), pero en realidad operaba hasta once días lunares.
Lanzamiento y órbita lunar

Luna 17 fue lanzado el 10 de noviembre de 1970 en 14:44:01 UTC. Después de llegar a la órbita de aparcamiento, la etapa final del Luna 17 el cohete se disparó para colocarlo en una trayectoria hacia la Luna (10/11/1970 a las 14:54 UTC). Después de dos maniobras de corrección de curso (el 12 de noviembre y 14), que entró en órbita lunar el 15 de noviembre, 1970 en 22:00 UTC.
La nave espacial soft-aterrizó en la Luna en el mar de las Lluvias, el 17 de noviembre a las 03:47 UTC. El módulo de aterrizaje tenía rampas de doble de la que la carga útil, Lunokhod 1, podría descender a la superficie lunar. A las 06:28 UT el rover se movió sobre la superficie de la Luna.
El rover funcionaría durante el día lunar, deteniéndose de vez en cuando para recargar sus baterías a través de los paneles solares. Por la noche el rover en hibernación hasta el siguiente amanecer, calentado por la fuente radiactiva.
1970:
- 17 de noviembre – 22: El rover lleva 197 m, regresa 14 de cerca fotos de la Luna y 12 vistas panorámicas, durante 10 sesiones de comunicación. También lleva a cabo análisis del suelo lunar.
- Diciembre 9 al 22: 1.522 m
1971:
- 08 al 20 enero: 1.936 m
- 8 a 19 febrero: 1.573 m
- 09 al 20 03: 2004 m
- 08 al 20 04: 1029 m
- 07 al 20 mayo: 197 m
- Junio 5 a 18: 1559 m
- Julio 4 a 17: 220 m
- 08 3ro al 16to: 215 m
- Agosto 31-14 de septiembre: 88 m
Fin de la misión y los resultados
Controladores terminaron la última sesión de comunicaciones con el Lunokhod 1 a las 13:05 UT el 14 de septiembre de 1971. Los intentos de restablecer el contacto fueron finalmente descontinuado y las operaciones del Lunokhod 1 cesado oficialmente el 4 de octubre de 1971, el aniversario del Sputnik 1. Durante sus 322 días de la Tierra de las operaciones, Lunokhod viajaron 10.540 metros (6,55 millas) y regresaron más de 20.000 imágenes de TV y 206 panoramas de alta resolución. Además, se realizó el 25 suelo lunar analiza con su RIFMA de fluorescencia de rayos X espectrómetro y utilizó su penetrómetro en 500 ubicaciones diferentes.
| Lunokhod 1 | |
| Tipo de Misión | Rover lunar |
| COSPAR ID | 1970-095A |
| Sitio web | Lunar y Planetario de Moscú Universidad Departamento Lunokhod 1 página |
| Propiedades Spacecraft | |
| Masa de lanzamiento | 5.600 kilogramos (£ 12.300) |
| Masa seca | 756 kilogramos (£ 1667) (rover solamente) |
| Energía | 180 vatios |
| Inicio de la misión | |
| Fecha de lanzamiento | 10 de noviembre 1970 |
| Cohete | Protón-K / D |
| Lugar de lanzamiento | Baikonur 81/23 |
| Fin de la misión | |
| Último contacto | 14 de septiembre 1971 |
| Lunar rover | |
| Componente de la nave espacial | Vagabundo |
| Fecha Landing | 17 de noviembre 1970, 03:47:00 UTC |
| Lugar de aterrizaje | Mar de Las Lluvias |
La mayoría de la gente, al menos en occidente, cree que el primer vehículo que llegó a la Luna fue el Apolo XI con los tres astronautas estadounidenses a bordo, en julio de 1969. Sin embargo, antes de que el hombre pisase nuestro satélite varios vehículos robóticos recorrieron los 384 mil kilómetros que nos separan de la Luna, para que los científicos de la época pudiesen poner a punto las misiones tripuladas posteriores. Fueron los rusos quienes dieron los primeros pasos: el primer robot en estrellarse contra la Luna fue el soviético “Luna 2”, el “Luna 3” fue el primero en enviar imágenes de su superficie (en 1959) y el “Luna 9” fue el primero en alunizar de una pieza, en 1966. Poco después, el “Luna 10” se convirtió en el primer satélite artificial de nuestro satélite natural. Los rusos, evidentemente, llevaban la delantera en lo que a sondas lunares robóticas se refiere. El alunizaje de Neil Armstrong y Edwin Aldrin opacaron completamente los logros soviéticos, y el éxito de sus ingenios -en gran parte por conveniencia política- pasó desapercibido en nuestros países. Esa es una de las razones por las cuales un robot impresionante como el Lunokhod 1, que 40 años después de haber llegado a la Luna aún funciona, casi no se conozca.
De pequeño tamaño -poco más de dos metros de largo y 160 centímetros de ancho- y operado por control remoto, el Lunokhod 1 fué durante 27 años (hasta 1997, cuando la NASA envió la Mars Pathfinder a Marte) el único vehículo operado por control remoto en visitar un lugar extraterrestre. Diseñados por Alexander Kemurdjian y construidos por la empresa NPO Lavochkin, los Lunokhod siguen siendo -40 años más tarde- los únicos dos “ laboratorios móviles robóticos” operados por control remoto en visitar la Luna.
La ubicación final de Lunokhod 1 fue incierto hasta 2010, ya que los experimentos que van láser lunar no habían podido detectar una señal de retorno de ella desde 1971. El 17 de marzo de 2010, Albert Abdrakhimov encontró tanto el módulo de aterrizaje y el rover [3] en el Orbitador de Reconocimiento Lunar imagen M114185541RC. [4] En abril de 2010, el Obs ervatorio Apache Point Operación Lunar Laser-van equipo (APOLLO) de la Universidad de California en San Diego utiliza las imágenes LRO para localizar la nave lo suficientemente cerca para la gama láser (distancia) mediciones. El 22 de abril de 2010 y el día siguiente, el equipo midió con éxito la distancia varias veces. La intersección de las esferas descritas por las distancias medidas a continuación a determinar la ubicación actual del Lunokhod 1 a menos de 1 metro. [5] [6] APOLLO está utilizando reflector Lunokhod de 1 para los experimentos, ya que descubrieron, para su sorpresa, que era volviendo mucho más luz que otros reflectores en la Luna. Según un comunicado de prensa de la NASA, APOLLO investigador Tom Murphy dijo: “Tenemos alrededor de 2.000 fotones del Lunokhod 1 en nuestro primer intento. Después de casi 40 años de silencio, este rover todavía tiene mucho que decir.” [7]
ervatorio Apache Point Operación Lunar Laser-van equipo (APOLLO) de la Universidad de California en San Diego utiliza las imágenes LRO para localizar la nave lo suficientemente cerca para la gama láser (distancia) mediciones. El 22 de abril de 2010 y el día siguiente, el equipo midió con éxito la distancia varias veces. La intersección de las esferas descritas por las distancias medidas a continuación a determinar la ubicación actual del Lunokhod 1 a menos de 1 metro. [5] [6] APOLLO está utilizando reflector Lunokhod de 1 para los experimentos, ya que descubrieron, para su sorpresa, que era volviendo mucho más luz que otros reflectores en la Luna. Según un comunicado de prensa de la NASA, APOLLO investigador Tom Murphy dijo: “Tenemos alrededor de 2.000 fotones del Lunokhod 1 en nuestro primer intento. Después de casi 40 años de silencio, este rover todavía tiene mucho que decir.” [7]
Ubicación actual: LRO imagen a partir de 2010
En noviembre de 2010, la ubicación del vehículo se había determinado que dentro de aproximadamente un centímetro. La ubicación cerca de la extremidad de la Luna, junto con la posibilidad de variar el rover, incluso cuando se encuentra en la luz del sol, promete ser particularmente útil para determinar los aspectos del sistema Tierra-Luna. [8]
En un informe publicado en mayo de 2013, científicos franceses en el Observatorio Costa Azul dirigido por Jean-Marie Torre informaron replicar los 2.010 láser que van experimentos realizados por científicos estadounidenses después de investigación utilizando imágenes de la NASA Lunar Reconnaissance Orbiter. En ambos casos, los pulsos de láser fueron devueltos desde el Lunokhod 1 retroreflector. [9]
LD/Agencias 2013-04-30
Científicos franceses han recuperado con éxito el retroreflector láser del robot soviético Lunokhod 1, el primer vehículo con control remoto que pisó la Luna, en 1970, y que se dio por desahuciado casi un año después de su llegada al satélite.
El Lunokhod 1 fue transportado a la Luna por la sonda Luna 17 el 17 de noviembre de 1970. El pequeño vehículo poseía ocho ruedas, tenía una longitud de 2,22 metros y 1,60 metros de ancho, y pesaba 756 kilogramos. Teledirigido desde la Tierra, exploró ampliamente la zona conocida como Mar de las Lluvias, realizando en casi un año de actividad más de 10 kilómetros de recorrido y transmitiendo a la Tierra más de 20.000 imágenes y 200 vistas panorámicas.
Durante 10 meses lunares, el robot obedeció las órdenes dadas por el equipo de Tierra, superando con creces los 90 días terrestres que se estimaron de vida útil. En previsión de que no pudiese superar la undécima noche lunar, se planeó estacionar el Lunokhod 1 en una zona plana, para que una vez agotada su vida útil, aún pudiese servir como plataforma del reflector láser que se dejó apuntando al planeta.
Parte importante de esta misión era la utilización del reflector láser diseñado y construido por especialistas franceses, que permitió obtener excelentes medidas de la distancia entre la Tierra y la Luna con una exactitud 100 veces superior a la de los métodos tradicionales de radiolocalización.
En los últimos 40 años nadie se había molestado en contactar de nuevo con este robot –que hasta fue subastado en 1993– hasta que un grupo de científicos galos, del Observatorio Côte d’Azur, decidió intentarlo.
Finalmente, en marzo de este año recibieron señales de retorno desde el reflector Lunokhod 1. Los resultados se obtuvieron durante más de tres noches, según ha indicado uno de los autores de esta iniciativa, Jean Marie Torre.
Una falta de confianza
Los expertos barajaban varias posibilidades acerca de la falta de funcionamiento del reflector que, según ha indicado Torre, puede haber sido por un exceso de polvo lunar, porque la cubierta se podría haber cerrado o porque el vehículo no haya sido estacionado con vistas de la Tierra tal y como se creía. “Al final, era más un problema de falta de confianza que un problema técnico”, ha indicado el científico.
La ubicación final de la última misión del Lunokhod 1 fue incierta hasta 2010. Sin embargo, gracias a las imágenes obtenidas por la NASA con el Lunar Reconnaissance Orbiter (LRO), el robot fue detectado a unos 2,3 kilómetros al norte de su punto de aterrizaje. Ahora, los investigadores galos también han conseguido ponerlo en marcha de nuevo, 40 años de spués.
spués.
Vehículo lunar Lunokhod 1 durante una prueba de sus habilidades. | Corbis Images
Lunokhod 1: El primer rover ruso en alunizar
Se desplazaba sobre 8 ruedas metálicas, y pesaba unos 750 kilogramos. A lo largo de todo un año recorrido unos 10 kilómetros de la región lunar llamada “Mar de las Lluvias” (Mare Imbrium). Durante este trayecto tomó unas 200 imágenes panorámicas de más de 80 mil metros cuadrados, que fueron transmitidas a la Tierra junto a 20 mil imágenes televisivas. Una de las tareas más importantes realizadas por este robot fueron las pruebas efectuadas -más de 500- sobre el suelo y polvo lunar. Gracias a Lunokhod 1, los científicos rusos dispusieron de un detallado análisis físico de 500 sitios diferentes de la superficie de la Luna, y de datos de las propiedades químicas de otros 25. Todo ello sin mover sus soviéticos traseros de la silla. El robot también había sido dotado de un sistema láser -capaz de “responder” con un pulso cuando se lo iluminaba desde la Tierra- que sirvió para conocer la distancia que nos separa de nuestro satélite con una exactitud 100 veces superior a la disponible en esa época.
Lunokhod 1 había sido diseñada para “vivir” durante unos tres meses. Pero su robustez permitió a los técnicos rusos operar el vehículo durante casi un año, hasta septiembre de 1971. En ese momento se agotó la pila isotópica encargada de proporcionar el calor indispensable para que sus instrumentos no se congelaran con el frío lunar, y se lo hizo desplazar hasta una región de terreno lo suficientemente llana como para que pudiese utilizarse, desde la Tierra, el reflector láser mencionado. El 14 de septiembre de 1971, a las 13:05 horas, se perdió contacto con el robot y la sonda se dio por perdida. Pero Lunokhod 1 todavía nos daría una sorpresa.
En 1993, y pesar de permanecer en la Luna, el vehículo robótico fue vendido en subasta por 68.500 dólares. Su dueño seguramente nunca imaginó que el Lunokhod 1 -o al menos parte de él- aún funcionaba. Hace pocos meses, en abril de este año, un equipo de la NASA liderado por Tom Murphy, de la Universidad de California en San Diego, “iluminó” el equipo láser del robot utilizando el telescopio de 3.5 metros “APOLLO” del Punto Observatorio Apache, en Nuevo México. Increíblemente, el Lunokhod 1 les respondió la señal, con una potencia inusitada. “La mejor señal que habíamos recibido del Lunokhod 2, hace muchos años, poseía unos 750 fotones, pero esta vez recibimos más de 2.000 fotones desde el Lunokhod 1”, relató Murphy. “Nos está hablando en voz alta y con claridad”, agregó. Si bien el artefacto es incapaz de desplazarse, tomar fotografías o responder a las señales de radio, parte de su equipo aún es capaz de funcionar. Cuatro décadas han pasado desde que ese robot con forma de tina de baño llegó a la Luna, y aún sigue respondiendo a nuestros mensajes.
año, un equipo de la NASA liderado por Tom Murphy, de la Universidad de California en San Diego, “iluminó” el equipo láser del robot utilizando el telescopio de 3.5 metros “APOLLO” del Punto Observatorio Apache, en Nuevo México. Increíblemente, el Lunokhod 1 les respondió la señal, con una potencia inusitada. “La mejor señal que habíamos recibido del Lunokhod 2, hace muchos años, poseía unos 750 fotones, pero esta vez recibimos más de 2.000 fotones desde el Lunokhod 1”, relató Murphy. “Nos está hablando en voz alta y con claridad”, agregó. Si bien el artefacto es incapaz de desplazarse, tomar fotografías o responder a las señales de radio, parte de su equipo aún es capaz de funcionar. Cuatro décadas han pasado desde que ese robot con forma de tina de baño llegó a la Luna, y aún sigue respondiendo a nuestros mensajes.
Ubicación aproximada de las dos misiones de rover Lunokhod. Luna 17/Lunojod 1 aterrizó en el borde occidental del Mare Imbrium en 1970. Luna 21/Lunokhod 2 aterrizó en el borde oriental del Mare Serenitatis en 1973, unos 120 km al norte del sitio de aterrizaje del Apolo 17.

Vehículo lunar todoterreno Apolo
Astromóvil lunar de la Apolo 15
Artículo principal: Lunar Roving Vehicle
La NASA incluyó los vehículos lunares todoterreno Apolo en tres misiones Apolo: la Apolo 15 (que alunizó el 30 de julio de 1971), la Apolo 16 (que alunizó el 21 de abril de 1972) y la Apolo 17 (que alunizó el 11 de diciembre de 1972).3
El Lunar Roving Vehicle (también llamado LRV, Rover lunar o molabs) era un vehículo todoterreno empleado por los astronautas de las misiones Apolo 15, 16 y 17 en sus desplazamientos por la superficie lunar.
El L.R.V. llegó a la Luna empaquetado y con unas dimensiones de 90 x 150 x 170 centímetros, introducido en un compartimento del módulo de descenso LEM. La autonomía del vehículo quedó establecida en 78 horas de funcionamiento durante el día lunar. Los tres vehículos L.R.V. fueron construidos por la empresa norteamericana Boeing, con apoyo de la Delco Electronics de General Motors.
Componentes
Se compone de un chasis de aluminio dorado con cuatro ruedas (no neumáticas, sino de malla de acero) y dos asientos, que una vez desplegado totalmente tiene unas dimensiones totales de 3,10 m de longitud, 1,80 m de anchura y 181 kg en vacío incluyendo el dispositivo de fijación y despliegue. El peso en carga es de 621 kg.
El chasis estaba formado por 3 partes: la delantera que contenía las baterías, la unidad de proceso de información y la unidad direccional del sistema de navegación, así como el control electrónico de marcha y dirección.
La parte central soportaba los asientos de los astronautas, la consola de control y la palanca de dirección situada entre ambos asientos. La parte posterior servía para el transporte del equipo científico.
El chasis se encontraba a una altura de 35 centímetros sobre el suelo, e iba sujeto por cuatro ruedas amortiguadas por un sistema de barras de torsión, con un diámetro de 81,8 centímetros cada una, asidas por un disco de aluminio y titanio y con una anchura de 23 centímetros realizadas con un entretejido a base de cuerdas de piano. Cada rueda tenía su propio motor eléctrico, alimentado por dos baterías de 36 voltios, además de una de reserva y se había estimado su vida útil en 75.000 revoluciones, es decir unos 180 km. Cada una llevaba un sistema de mecanismo que permitía su desengrane del motor para que pudiese seguir girando si éste fallaba, permitiendo al L.R.V. desplazarse a velocidad lenta con sólo 2 ruedas motrices.
Navegación
La velocidad que alcanzaba era de unos 3-4 kilómetros hora, y la máxima de 14, y en total realizaron 90,8 kilómetros por la superficie lunar, sin alejarse nunca más de 9,6 kilómetros del módulo, pues si el vehículo se averiaba era la distancia de seguridad máxima que podrían recorrer a pie hasta la nave.
Además de transportar a dos astronautas, también transportaba antenas de bajo alcance, repetidores de las comunicaciones radio en directo con la Tierra, tomavistas de 16 milímetros con sus respectivos cargadores, telecámaras, fotocámara de 70 milímetros, perforadora del suelo, pinzas para recoger muestras, magnetómetro, herramientas, repuestos y casettes bajo los asientos.
El sistema de navegación debía permitir a los astronautas el regreso al módulo lunar (L.M.) y se basaba en un sistema de movimiento por estima a partir de un punto conocido que determinaba constantemente la distancia recorrida y la dirección.
Constaba de un giroscopio direccional que suministraba información constante sobre la dirección de la marcha, odómetros en cada una de las ruedas que determinaban la velocidad y distancia recorrida, y una unidad procesadora que calculaba así la distancia recorrida. Un indicador de posición señalaba la dirección del vehículo, orientación, distancia total recorrida y distancia al módulo lunar.
La precisión de estos sistemas permitió hacer regresar al vehículo a menos de 100 m de distancia del módulo lunar después de recorrer 32 km, lo cual bastaba para que quedase situado en el campo visual de los tripulantes.
Las ruedas eran el principal factor del éxito del Rover. Llevaba cuatro, consistentes en un cubo de aluminio torneado, con una llanta interna denominada parachoques, de modo que, aunque el Rover tropezase con un obstáculo durante la marcha, prácticamente a máxima velocidad, no sufriera daño la rueda, que sólo se deformaría hasta esta llanta de seguridad y así no acusaría una alteración definitiva del perfil. El “neumático” era de alambre galvanizado. Las ruedas tenían un diámetro de 81 cm, pero al aguantar el peso total del Rover en la superficie lunar, aquél se reducía a 65 cm.
Cada rueda iba accionada por un motor eléctrico independiente con un orden escalonado de marcha muy preciso para evitar la penetración de polvo lunar, precaución que resultó muy acertada, porque el problema del polvo fue más grave de lo que se creyó en principio. Las unidades propulsoras iban montadas en la cara interna de los cubos y estaban diseñadas para permitir la operación a temperaturas extremas de +- 250 grados Fahrenheit (121 grados centígrados). El vehículo disponía de un sistema de emergencia, gracias al cual si fallaban los motores de dos ruedas, se los habría podido desconectar y dejar las ruedas libres para proseguir el viaje. No sucedió en ninguna de las tres misiones en que se emplearon los Rover; pero, desde luego, una avería cuando los astronautas se hallaban lejos del módulo habría sido de graves consecuencias.
La vieja teoría de fuertes tormentas de polvo en la Luna ya había sido refutada, mucho antes de que el primer hombre pusiera el pie en ella; pero, su superficie es indudablemente áspera. Nadie ha mejorado la descripción de Edwin Aldrin de “impresionante desolación”. Los Rover estaban diseñados para superar obstáculos de hasta 30 cm, y para cruzar grietas de 76 cm; los amortiguadores del vehículo lunar tenían que trabajar más que los de un coche terrestre porque existe allí menos gravedad que lo mantenga pegado a la superficie. Además, se calentaban muchísimo debido a la falta de aire refrigerador. Se emplearon aceites especiales de silicona para soportar las extremas temperaturas.
El Rover Lunar podía, además, subir y bajar gradientes de 20 grados y el freno de mano era capaz de sujetarlo en cualquier pendiente inferior a 30 grados. A plena carga, la distancia al suelo era de 35 cm , previsión que resultó adecuada, pues en ningún momento “rozó” con la superficie.
El vehículo disponía de dos sistemas completos de baterías de plata-zinc para su alimentación, cada una de las cuales habría bastado por sí sola. Eran unidades no recargables a base de células de plexiglás con placas de plata-zinc en electrolito de hidróxido de potasio. Cada batería constaba de 32 células dentro de una caja de magnesio, y pesaba 27 kg . Los instrumentos del tablero del Rover, denominadas “integradores amperio hora” desempeñaban una función contable, controlando la cantidad total de corriente salida de las baterías, cada una de las cuales estaba diseñada para suministrar 115 amperios-hora.
El vehículo llevaba dirección en las ruedas delanteras y en las traseras utilizando una geometría Ackermann modificada, que impide que las ruedas derrapen girando la rueda interna un mayor ángulo que la externa. Cada juego (delantero y trasero) podría desconectarse en caso de avería para situarlo en posición de marcha al frente. Para frenado del Rover, cada unidad propulsora iba equipa da con un disco dirigido por cable. El control manual desactiva los motores y actuaba sobre las pastillas de freno del mismo modo que las de un coche normal.
da con un disco dirigido por cable. El control manual desactiva los motores y actuaba sobre las pastillas de freno del mismo modo que las de un coche normal.
La suspensión constaba de pares de brazos triangulares entre el chasis y los propulsores. Las cargas se transmitían a través de cada brazo, a su propia barra de torsión; y el recorrido vertical estaba limitado por un amortiguador situado entre el chasis y cada uno de los brazos superiores de suspensión.
El Rover poseía varios subsistemas principales. Uno de ellos, para la estiba y el despliegue; otro, para la movilidad: es decir, ruedas, suspensión, motores y controles; un tercero, para la alimentación, incluidas las baterías eléctricas principales, y otras para la cabina de tripulantes y las ayudas de navegación.
Recorrido del vehiculo lunar- Apolo 16
Transportar el Rover a la Luna, en un módulo lunar no precisamente espacioso, fue un gran problema. Hubo que plegarlo para estibarlo hasta obtener una dimensión de 122 x 183 cm y desplegarlo a la llegada. La operación era, fundamentalmente, automática y podía realizarla un astronauta de pie en la escalerilla entre el módulo y la superficie, con simplemente accionar una serie de anillas D. El primer paso consistía en soltar los muelles de retención del vehículo en su compartimento de estiba y hacerlo girar 45 grados. A continuación, se desplegaba la sección trasera para que las ruedas cayesen hacia abajo y quedasen automáticamente fijas en su posición. Luego, se bajaba el Rover y se apartaba del Módulo, tras lo cual la sección trasera descendía hasta la superficie lunar para que las ruedas delanteras pudiesen bajar hasta su posición. Finalmente el vehículo completo se depositaba en la superficie para que a continuación el astronauta bajase y lo liberase totalmente del mecanismo de despliegue. Una vez cargado el resto del equipo (incluido el primordial de televisión) el Rover estaba listo para su utilización.
El rover del Apolo 16 olvidado en su plaza de la Luna desde el 21 de abril de 1972
El chasis principal era armazón de tres partes formado por más de 2000 piezas de aluminio soldadas. Las ruedas delanteras, junto con la suspensión y los mecanismos de dirección, iban montadas en la porción delantera, en la que se hallaban alojadas las baterías y otras unidades. La porción central de 152 x 168 cm de ancho contenía los asientos de los astronautas y la consola de controles, mientras que la sección trasera del chasis alojaba las ruedas traseras y la suspensión, más la caja de ca rga para el distinto instrumental de experimentos a descargar en la superficie de la Luna. Los ALSEPS, o Paquetes Experimentales Superficiales del Apolo Lunar, fueron un éxito y la mayoría de los instrumentos siguieron transmitiendo información mucho después de concluir las misiones, e incluso fueron desconectados expresamente. En conjunto, el Rover era notablemente compacto y los diseñadores realizaron un magnífico trabajo.
rga para el distinto instrumental de experimentos a descargar en la superficie de la Luna. Los ALSEPS, o Paquetes Experimentales Superficiales del Apolo Lunar, fueron un éxito y la mayoría de los instrumentos siguieron transmitiendo información mucho después de concluir las misiones, e incluso fueron desconectados expresamente. En conjunto, el Rover era notablemente compacto y los diseñadores realizaron un magnífico trabajo.
El ‘LRV’ de 1971 pesaba 210 kilogramos y era plegable. Para su largo viaje se le fijó por fuera del transbordador lunar.
El buggy del Apolo 17 estacionado en su lugar de descanso definitivo desde el 11 de diciembre de 1972.
Las imágenes han sido tomadas por la LRO desde una altura de 25 kilómetros de altura y en ellas podemos ver el lugar de aterrizaje del módulo lunar (LM) del Apolo 15 que estaba situado a 2 kilómetros del cañón lunar Hadley. En aquella misión, los astronautas tenían como objetivo recoger muestras de los basaltos de la superficie lunar, explorar por primera vez un cañón lunar y realizar una serie de experimentos dentro del tercer lote ALSEP (Apollo Lunar Surface Experiments Package) en el que, por ejemplo, dejaron instalado un generador de radioisótopos termoeléctricos (RTG) que enviaron datos, durante 6 años, a las instalaciones de la NASA. Al otro extremo de la zona de descenso, es decir, al extremo contrario al ALSEP podemos encontrar “aparcado” el LRV que se estrenó, precisamente, en esta misión.

Lunokhod 2
Lunokhod 2 (ruso: Луноход-2, la luna walker) fue el segundo de los dos no tripulados lunares rovers aterrizó en la Luna por la Unión Soviética como parte del programa Lunokhod.
La Luna 21 nave espacial aterrizó en la Luna y desplegó la segunda Soviética rover lunar (Lunokhod 2) en enero de 1973. [1] Los objetivos principales de la misión eran para recoger imágenes de la superficie lunar, examinará luz ambiental niveles para determinar la viabilidad de observaciones astronómicas de la Luna, realizan láser que van experimentos de la Tierra, observan solares rayos X, miden locales campos magnéticos, y estudiar la mecánica de suelos del material de la superficie lunar.
El Lunojod 2 alunizó el 15 de enero de 1973 a bordo de la sonda Luna 21, en el cráter Le Monnier del Mar de la Serenidad, a 25,85 ºN 30,45 ºE, tan sólo a 180 kilómetros más al norte del asentamiento del Apollo 17. Al día siguiente desplegó la rampa doble que le permitió salir a la superficie lunar. El vehículo, profundamente remodelado y mejorado con respecto a su antecesor, pesaba 838 kg y exploró una vasta zona del cráter Le Monnier, recorriendo 37 km en un lapso de cuatro meses, aproximadamente.
En esta segunda misión se realizaron numerosas pruebas científicas sobre la superficie lunar, de radiación entre otras y se enviaron a la Tierra cerca de 86 vistas panorámicas y más de 80 000 imágenes televisivas.
Los principales objetivos de esta misión, además del sistema de teleguiado, fueron: observación en alta resolución de las radiaciones X solares, galácticas y extragalácticas; obtención de datos del campo magnético lunar; medición de la luz zodiacal durante los períodos de día lunar, así como de las emisiones interplanetarias y galácticas durante las noches lunares y estudio de los componentes de la superficie lunar.
Los dos laboratorios automáticos superaron los tres meses de vida prevista, si bien los cinco meses del segundo modelo perfeccionado (dejó de funcionar a mediados de 1973), representaron una pequeña decepción.
Lunokhod 2 rover y subsistemas
El rover de pie 135 cm (4 pies 5 pulgadas) de alto y tenía una masa de 840 kg (1850 libras). Con alrededor de 170 cm (5 pies 7 pulgadas) de largo y 160 cm (5 pies 3 pulgadas) de ancho y tenía ocho ruedas cada uno con una suspensión independiente, el motor eléctrico y el freno. El rover tenía dos velocidades, ~ 1 km / hy ~ de 2 km / h (0,6 mph y 1,2 mph). Lunokhod 2 estaba equipado con tres cámaras de televisión, una montada en lo alto de la rover para la navegación, lo que podría regresar imágenes de alta resolución en diferentes velocidades de cuadro -3.2, 5.7, 10.9 o 21.1 segundos por cuadro. Estas imágenes fueron utilizadas por un equipo de cinco hombres de los controladores en la Tierra que enviaron comandos de conducción al móvil en tiempo real. La energía fue suministrada por un panel solar en el interior de una tapa redonda con bisagras que cubría la bahía instrumento, lo que cargar las baterías cuando se abre. Una polonio-210 unidad de calefacción de radioisótopos se utiliza para mantener el rover caliente durante las largas noches lunares. Había cuatro cámaras panorámicas montadas en el vehículo. Los instrumentos científicos incluyeron un tester de m ecánica de suelo, el experimento de rayos X solar, un astro fotómetro para medir visibles y ultravioletas niveles de luz, un magnetómetro desplegado delante del vehículo en el extremo de un 2.5 m (8 pies 2 pulg) pluma, un radiómetro, un fotodetector (Rubin-1) para los experimentos de detección láser, y un láser-Francés suministrado reflector de esquina. La sonda lleva un bajorrelieve de Vladimir Lenin y el escudo de armas soviético. El módulo de aterrizaje y el rover junto congregaron 1814 kg.
ecánica de suelo, el experimento de rayos X solar, un astro fotómetro para medir visibles y ultravioletas niveles de luz, un magnetómetro desplegado delante del vehículo en el extremo de un 2.5 m (8 pies 2 pulg) pluma, un radiómetro, un fotodetector (Rubin-1) para los experimentos de detección láser, y un láser-Francés suministrado reflector de esquina. La sonda lleva un bajorrelieve de Vladimir Lenin y el escudo de armas soviético. El módulo de aterrizaje y el rover junto congregaron 1814 kg.
El Protón-K / D lanzador poner la nave espacial en la Tierra órbita de aparcamiento seguida de la inyección translunar. El 12 de enero 1973 Luna 21 se frenó en un 90 por 100 km (56 por 62 millas) la órbita lunar. El 13 de enero y 14, el perilunio se bajó a 16 km (9,9 millas) de altura.
Las operaciones de desembarque y de superficie
El 15 de enero después de 40 órbitas, el cohete de frenado se disparó a 16 km (9,9 millas) de altura, y la nave comenzó a des-órbita. A una altitud de 750 m (2.460 pies) de los principales propulsores comenzaron a disparar, la desaceleración de la caída hasta una altura de 22 m (72 pies) se alcanzó. En este punto, los principales impulsores cerrados y los propulsores secundarios encendieron, disminuyendo la caída hasta que el módulo de aterrizaje fue de 1,5 m (5 pies) por encima de la superficie, donde el motor se apaga. Aterrizaje se produjo a las 23:35 UT en Le Monnier cráter en 25,85 grados N, 30.45 grados E.
Después de aterrizar, el Lunokhod 2 tomó imágenes de televisión de los alrededores, y luego rodó por una rampa a la superficie a las 01:14 UT el 16 de enero y tomó fotografías de la Luna 21 lander y aterrizaje sitio, conducir por 30 metros. Después de un período de carga hasta sus baterías, que tomó más fotografías del sitio y el módulo de aterrizaje, y luego se lanzó a explorar la luna.
El rover funcionaría durante el día lunar, deteniéndose de vez en cuando para recargar sus baterías con los paneles solares. Por la noche el rover en hibernación hasta el siguiente amanecer, calentado por la fuente radiactiva.
- Enero 18, 1973-enero 24, 1973: El rover lleva 1.260 metros
- Feb 8 a 23: El rover lleva 9.086 metros más
- 11 hasta 23 marzo: El rover lleva 16.533 metros más
- 9 de abril al 22: El rover lleva 8.600 metros más
- 8 may hasta 3 jun: El rover conduce 880 metros más
Fin de la misión
El 4 de junio de 1973 se anunció que se completó el programa, lo que lleva a la especulación de que el vehículo probablemente no a mediados de mayo o no pudo ser reanimado después de la noche lunar de mayo-junio.
Más recientemente, Alexander Basilevsky relaciona una cuenta en la que el 9 de mayo, la tapa abierta del rover tocó una pared del cráter y se cubrió de polvo. Cuando la tapa se cerró, este polvo (un muy buen aislante) fue arrojado a los radiadores. Al día siguiente, 10 de mayo de controladores vio la temperatura interna de la subida Lunokhod ya que era incapaz de enfriarse por sí mismo, con el tiempo haciendo que el rover inoperable. [2] El 11 de mayo, señal del rover se perdió.
Lunokhod 2 operó durante unos 4 meses, y la estimación original que cubría 37 kilometros (23 millas) de terreno, incluyendo las tierras altas montañosas y fisuras, y envió 86 imágenes panorámicas y más de 80.000 imágenes de televisión espalda. [2] [3] [4] Muchas pruebas mecánicas de la superficie, las mediciones que van láser, y otros experimentos se completaron durante este tiempo. Se pensaba Lunokhod 2 haber cubierto 37 kilómetros (23 millas) sobre la base de la rotación de las ruedas, pero los científicos rusos en la Universidad Estatal de Moscú de Geodesia y Cartografía (MIIGAiK) revisaron que a una distancia estimada de alrededor de 42,1 a 42,2 km (26,2 a 26,2 millas) basado en Lunar Reconnaissance Orbiter (LRO) imágenes de la superficie lunar. [5] [6] discusiones posteriores con sus homólogos estadounidenses terminaron con una acordada distancia final de los 39 km (24 millas), que se ha pegado desde entonces. [7] [8]
El rover Lunokhod tenía el récord de fuera de la Tierra a distancia itinerante hasta el 27 de julio 2014, cuando Marte de la NASA Opportunity superó después de haber recorrido más de 40 km (25 millas). [9] [10] Un equipo internacional ha confirmado que los métodos utilizado para calcular odometría los dos rovers es consistente y comparable de la Luna a Marte, dijeron funcionarios de la agencia. [11]
Estado actual
Imagen Lunar Reconnaissance Orbiter de Lunokhod 2 y sus pistas. La gran flecha blanca indica el rover, las flechas blancas pequeñas indican las huellas del rover, y la flecha negro indica el cráter donde recogió su carga mortal de polvo lunar. [12]
Lunokhod 2 continúa siendo detectado por lunares experimentos láser que van y su posición es conocida por una precisión inferior al metro. [13] El 17 de marzo 2010 Phil Stooke, profesor de la Universidad de Western Ontario anunció que había localizado descanso final de Lunokhod 2 lugar en las fotografías realizadas por la NASA Lunar Reconnaissance Orbiter (LRO). [14] [15] [16] Sin embargo, la identificación reportado fue incorrecto (el punto identificado fue una marca en las huellas del rover cerca del final de la ruta, hecho que Lunokhod dio la vuelta) y el equipo de LRO LROC identificó la ubicación correcta del rover. La nave espacial fue fotografiado por el LRO en marzo de 2012. [cita requerida] Excelentes Lunokhod 2 imágenes de la LROC publicados por Mark Robinson en el sitio SESE de ASU. [Cita requerida]
Propiedad Presente
La propiedad de Lunokhod 2 y la Luna 21 lander fue vendido por el Lavochkin Association for $ 68.500 en diciembre de 1993 en una de Sotheby subasta en Nueva York. [16] [17] (El catálogo [18] enumera incorrectamente montón 68A como Luna 17 / Lunokhod 1 ).
El comprador fue el empresario de juegos de ordenador y el hijo de astronauta Richard Garriott, quien afirmó en una entrevista de 2001 con juegos de ordenador Revista ‘s Cindy Yans que:
He comprado Lunakod 21 [sic] de los rusos. Estoy ahora solo propietario privado del mundo de un objeto en un cuerpo celeste extranjera. Aunque hay tratados internacionales que dicen, ningún gobierno podrá reclamar a la geografía de la tierra del planeta, no soy un gobierno. Resumiendo, yo reclamo la luna en el nombre del Señor británica! [19]
Garriott confirmó más tarde que él es el propietario del Lunokhod 2. [16] [20] [21]

Estudio comparativo, alunizaje de vehículos lunares.
Información adicional en: http://accursio.com/blog/?p=839
Sojourner
La Mars Pathfinder fue la primera de una serie de misiones a Marte que incluyen rovers (vehículos robóticos de exploración). Esta misión a Marte fue la más importante desde que las Viking aterrizaran sobre el planeta rojo en 1976 [cita requerida].
La Mars Pathfinder fue lanzada el 4 de diciembre de 1996 a bordo de un cohete Delta, un mes después del lanzamiento del Mars Global Surveyor y luego de 7 meses de viaje llegó a Marte el 4 de julio de 1997. El sitio de aterrizaje es Ares Vallis (Valle de Marte) en una región llamada Chryse Planitia (Planicies de Oro). Durante el viaje la nave realizó cuatro correcciones de vuelo: el 10 de enero, 3 de febrero, 6 de mayo y 25 de junio. El lander se abrió exponiendo al rover llamado Sojourner (en honor a la famosa abolicionista estadounidense Sojourner Truth) que realizaría diferentes experimentos en la superficie marciana.
La misión Mars Pathfinder llevó un conjunto de instrumentos científicos para analizar la atmósfera marciana, el clima, geología y la composición de las rocas y el suelo. El proyecto fue el segundo del programa Discovery de la NASA, el cual promueve el envío de naves de bajo costo y de lanzamientos frecuentes bajo la premisa “más barato, más rápido y mejor” sostenida por su administrador Daniel Goldin. La misión fue dirigida por el Jet Propulsion Laboratory (JPL), una división del Instituto de Tecnología de California (“CalTech”), responsable del Programa de Exploración a Marte de la NASA.
El Sojourner tiene cámaras delantera y trasera y el hardware para llevar a cabo varios experimentos científicos. Diseñado para una misión que dura 7 soles, con posibilidad de ampliación a 30 soles, [2] que era, de hecho, activo durante 83 soles. La estación base tuvo su última sesión de comunicación con la Tierra a las 3:23 am hora del Pacífico el 27 de septiembre de 1997. [1] [3] El rover necesita la estación base para comunicarse con la Tierra, a pesar de que todavía funciona en el momento que las comunicaciones terminaron. [3]
Sojourner viajó una distancia de poco más de 100 metros (330 pies) por se perdió la comunicación en tiempo. [4] Se instruyó a permanecer estacionaria hasta 05 de octubre 1997 (sol 91) y luego en coche alrededor de la sonda. [5]
Descripción

{kind=link}
El nombre del rover, Sojou rner, significa “viajero”, y fue seleccionado en un concurso de ensayos ganado por V. Ambroise, a 12 años de edad, de estado norteamericano de Connecticut. [6] Se llama así por abolicionista y activista de los derechos de las mujeres Sojourner Truth . [6] El premio de segundo lugar fue para Deepti Rohatgi, 18, de Rockville, MD, quien propuso Marie Curie, un químico polaco ganador del Premio Nobel. [6] En tercer lugar fue para Adam Sheedy, 16, de Round Rock, TX, que eligió Judith Resnik, astronauta y de transporte miembro de la tripulación ‘a Estados Unidos. [6] El rover también era conocido como Experimento microrover Vuelo MFEX abreviada. [7]
rner, significa “viajero”, y fue seleccionado en un concurso de ensayos ganado por V. Ambroise, a 12 años de edad, de estado norteamericano de Connecticut. [6] Se llama así por abolicionista y activista de los derechos de las mujeres Sojourner Truth . [6] El premio de segundo lugar fue para Deepti Rohatgi, 18, de Rockville, MD, quien propuso Marie Curie, un químico polaco ganador del Premio Nobel. [6] En tercer lugar fue para Adam Sheedy, 16, de Round Rock, TX, que eligió Judith Resnik, astronauta y de transporte miembro de la tripulación ‘a Estados Unidos. [6] El rover también era conocido como Experimento microrover Vuelo MFEX abreviada. [7]
Sojourner tiene paneles solares y una batería no recargable, que permitió que las operaciones nocturnas limitados. [2] Una vez que las baterías se agotan, sólo podía operar durante el día. [2] Las baterías son de cloruro de litio-tionilo (LiSOCl2) y podrían proporcionar 150 vatios-hora. [8] Las baterías también permitieron la salud del rover comprobación mientras encerrado en la etapa de crucero, mientras en el camino a Marte. [9]
0.22 metros cuadrados de células solares podrían producir un máximo de unos 15 vatios en Marte, dependiendo de las condiciones. [8] Las células fueron GaAs / Ge (arseniuro de galio / germanio) y capaz de eficiencia un 18 por ciento. [9] Podrían sobrevivir hasta unos -140 ° Celsius (-220 ° F). [9]
Su unidad central de procesamiento (CPU) es un 80C85 con un reloj de 2 MHz, dirigiéndose a 64 Kbytes de memoria. [2] Tiene cuatro almacenes de memoria; [2] el ya mencionado 64 Kbytes de RAM (hecho por IBM) para el procesador principal , 16 Kbytes de PROM resistentes a la radiación (fabricado por Harris), 176 Kbytes de almacenamiento no volátil (hecho por Seeq Tecnología), y 512 Kbytes de almacenamiento temporal de datos (hecho por Micron). [2] La electrónica fueron alojados dentro de la Cálido Electrónica Caja dentro del rover. [2]
Se comunica con la estación base con 9.600 baudios módems de radio. [2] La tasa de práctica estaba más cerca de 2.600 baudios con un rango teórico de aproximadamente medio kilómetro. [2] El rover podría viajar fuera del rango del módulo de aterrizaje, pero su software tendría que ser cambiado a ese modo. [2] Bajo la conducción normal, que enviará periódicamente un “latido mensaje” a la sonda. [2]
Los módems de radio UHF trabajaron similar al walkie-talkies, pero enviaron datos, no la voz. [10] Se podría enviar o recibir, pero no ambos al mismo tiempo, lo que se conoce como half-duplex. [10] Los datos se comunicó en explosiones de 2 kilobytes. [10]
El Espectrómetro de rayos X Alfa Protón (APXS) es casi idéntica a la de Marte 96, y fue una colaboración entre el Instituto Max Planck para la Investigación del Sistema Solar en Lindau, Alemania (conocido formalmente como el Instituto Max Planck para Aeronomía) y el Universidad de Chicago en los Estados Unidos. [11] APXS podría determinar la composición elemental de las rocas de Marte y el polvo, a excepción de hidrógeno. [11] Su acción consiste en exponer una muestra de partículas alfa, y luego medir las energías de protones emitidos, rayos X y retrodispersados partículas alfa. [11]
Sojourner investigates a rock named “Yogi Bear” in 1997 (NASA/JPL-Caltech)
El rover tenía tres cámaras:. 2 cámaras monocromas en el frente, y una cámara de color en la parte posterior [12] Cada cámara frente tenía un arsenal de 484 píxeles de alto por 768 de ancho. [12] La óptica consistieron en una ventana, lente, y el campo aplanador. [12] La ventana estaba hecha de zafiro, mientras que el objetivo de la lente y aplanador estaban hechos de seleniuro de zinc. [12] El rover fue fotografiada en Marte por el sistema de la cámara IMP de la estación base, que también ayudó a determinar donde el rover debe ir . [7]
Operación Sojourner fue apoyada por Software de Control Rover, que corrieron en un Silicon Graphics Onyx2 equipo de nuevo en la Tierra, y se les permite secuencias de comandos que se generan usando una interfaz gráfica. [13] El conductor rover que usar gafas 3D suministradas con imágenes de la estación base y mover un modelo virtual con el controlador spaceball, un joystick especializada. [13] El software de control permite al rover y el terreno circundante para ser vistas desde cualquier ángulo o posición, apoyando el estudio de las características del terreno, la colocación de puntos de ruta, o haciendo sobrevuelos virtuales. [13]
Fin de la misión
Aunque la misión estaba programada para durar un mes y una semana, estos límites fueron excedidos por 3 veces y 12 veces respectivamente. El contacto final con la Pathfinder fue a las 10:23 UTC del 27 de septiembre de 1997., aunque los planificadores de la misión trataron de restablecer contacto durante los siguientes cinco meses, la exitosa misión fue dada por terminada el 10 de marzo de 1998. Después del aterrizaje, la Mars Pathfinder fue renombrada como la Sagan Memorial Station en honor al famoso astrónomo y planetólogo Carl Sagan. En total, la misión excedió en pocos días las metas establecidas.
El aterrizaje de la Mars Pathfinder fue exactamente como había sido diseñado por los ingenieros de la NASA.
Spirit
Spirit (cuya designación oficial es MER-A, Mars Exploration Rover – A) es el primero de los dos robots que forma parte del Programa de Exploración de Marte de la NASA. La nave aterrizó con éxito en el planeta Marte a las 4:35 UTC del 3 de enero de 2004 (MSD 46216 3:35 AMT, 26 Tula 209 Dariano) y finalizó su actividad en marzo de 2010, momento en el que dejó de enviar comunicaciones. Su gemelo Opportunity aterrizó con éxito en Marte el 24 de enero de 2004.
Una tormenta de polvo azotó el hemisferio opuesto al del aterrizaje del Spirit, lo que produjo un calentamiento de la atmósfera, ya que el polvo en suspensión atrapa calor; también causó un estrechamiento de la atmósfera por lo que los responsables de la misión ordenaron al módulo de descenso que abriera los paracaídas 2 segundos antes para compensarlo.
En el lugar de aterrizaje del Spirit la atmósfera tenía más polvo en suspensión del previsto y las temperaturas diurnas, aunque bajas, eran 10 °C sobre las previstas. Estos robots llevan unas baterías de plutonio para calentarlos y así poder sobrevivir a las frías noches marcianas de hasta -105 °C; pero el funcionamiento de las baterías causó un calentamiento de 5 °C, lo que obligó a apagar al Spirit hacia el mediodía marciano, esta circunstancia, unida a una rampa ‘airbag’ mal plegada, retrasó hasta el 16 de enero de 2004 el instante en que el Spirit pisó el suelo marciano.
El Spirit aterrizó en cráter Gusev aproximadamente a 10 km del centro del cráter a una latitud 14,5718° S y una longitud 175,4785° E.1 Un panorama muestra una superficie ligeramente inclinada llena de piedras pequeñas, con unas colinas en el horizonte a 27 km de distancia.2 El equipo de MER nombró el sitio del desembarco la “Columbia Memorial Station”, en honor a los siete astronautas que fallecieron en el Transbordador Espacial Columbia.
El 27 de enero la NASA conmemoró la muerte de la tripulación del Apolo 1 nombrando tres colinas al norte de la zona de aterrizaje del Spirit como Colinas Apolo 1 y el 2 de febrero, se homenajeó a los astronautas de la misión final del Columbia nombrando 7 colinas al este del lugar de desembarco como Colinas del Columbia. Las siete crestas recibieron los nombres Anderson, Brown, Chawla, Clark, Husband, McCool y Ramon; la NASA ha sometido estos nombres a la Unión Astronómica Internacional para su aprobación.
Panorama de las Colinas Apollo desde el lugar de aterrizaje del Spirit
Resumen de los éxitos de la misión
John Callas, director del proyecto de los Vehículos de Exploración Todo Terreno de Marte, en el Laboratorio de Propulsión a Chorro (JPL) declaró6 que son tres los descubrimientos científicos más importantes que realizó Spirit:
- Evidencia de antiguos manantiales en ebullición
“Este descubrimiento se logró debido al fallo de una de las ruedas de Spirit”, recuerda. “Dos años después de iniciada su misión, la rueda delantera derecha dejó de funcionar (todavía no sabemos bien por qué). Entonces, Spirit tuvo que arrastrarla consigo, dejando de este modo un surco en el suelo. Esto reveló depósitos de silicio amorfo, los cuales se relacionan mucho con sistemas hidrotérmicos. Aparentemente, Marte alguna vez tuvo agua y la energía para calentarla. Quizás nunca hubiéramos sabido de esto si no hubiese sido por el infortunio de la rueda rota”.
- Evidencia de una atmósfera densa y de agua dulce
Hoy en día, la atmósfera marciana es tan tenue que la mayor parte de la vida tal y como la conocemos no podría sobrevivir allí. El descubrimiento de carbonatos que realizó el robot explorador Spirit en el Peñón del Comanche es evidencia irrefutable de que no siempre esto fue así. Callas explica: “Los carbonatos que encontró Spirit se formaron en depósitos superficiales de agua” que pudieron solamente existir bajo una atmósfera densa que previniese su rápida evaporación. Más aún, la química de los carbonatos nos dice que el agua no era ácida como la de otros antiguos depósitos de Marte”. A la vida le pudo haber gustado este lugar, hace miles de millones de años.
- Evidencia de un ciclo activo de agua
Lo primero que hizo Spirit cuando quedó atrapado en Troya fue tratar de liberarse. Las ruedas de Spirit, al girar, revolvieron el suelo, dejando así al descubierto sulfatos. “Estos minerales parecen haber estado en contacto con agua quizás hace apenas un millón de años”, dice Callas. En términos geológicos, esto es muy reciente, y sugiere que hay un ciclo activo de agua en el Planeta Rojo. Cualquiera de estos descubrimientos, por sí mismo, hubiese sido considerado un éxito rotundo para los que originalmente planearon la misión en la década de 1990. Los tres juntos, más otros que no se mencionan aquí, dan a Spirit un lugar de honor en el panteón de las misiones ilustres de la NASA.
Una de las múltiples webs interesantes sobre el tem:
https://es.wikipedia.org/wiki/Spirit
La NASA renuncia a liberar a ‘Spirit’ de su trampa de arena
Después de seis años de exploración sin precedentes del planeta rojo, el vehículo robotizado de la NASA ‘Spirit’ se reconvertirá en una plataforma fija de investigación. La agencia espacial estadounidense ha tomado la decisión después de fracasar en todos los intentos por liberar al vehículo de una trampa de arena en la que se encuentra aprisionado desde hace seis meses.
Mapa de Marte donde se muestra la posición del Spirit en el sol 715 (6 de enero de 2006)
Imagen de la roca Adirondack taladrada.


Debe estar conectado para enviar un comentario.