Montículos de Bottle Creek
Montículos de Bottle Creek
Coordenadas: 31°00′32″N 87°56′26″O
Montículos de Bottle Creek
Lugar inscrito en el Registro Nacional de Lugares Históricos
Localización administrativa
País: Estados Unidos
División: Condado de Baldwin
Localidad: Stockton
Historia
Estilo: Montículo de plataforma
Abandono: 1550
Ocupantes : Cultura Pensacola
Descubrimiento: 1932
Arqueólogos: David L. DeJarnette
Gestión
Propietario: Comisión Histórica de Alabama
Los Montículos de Bottle Creek es un sitio arqueológico propiedad y monitoreado por la Comisión Histórica de Alabama ubicado en una isla pantanosa baja dentro del delta del río Mobile-Tensaw al norte de Mobile, Alabama, Estados Unidos. Fue ocupado por los pueblos de la Cultura Pensacola, una variante de la Cultura Misisipiana y es el sitio misisipiano más grande de la costa central del Golfo. Fue designado como Hito Histórico Nacional el 10 de marzo de 1995, lo que lo convierte en uno de los dos únicos sitios de este tipo en Alabama (junto con el Sitio arqueológico de Moundville).1
Historia
El sitio fue ocupado entre 1250 y 1550, y sirvió como punto focal para la interacción con otras áreas de la cultura misisipiana a lo largo de la costa y el interior del sureste de los Estados Unidos. Se encuentra en Mound Island en el delta del río Mobile-Tensaw, al norte de la actual Mobile, e incluye 18 montículos de plataforma, el más alto 45 pies (13,7 m) de alto. Cinco de esos dieciocho montículos están puestos alrededor de la plaza central. Era el cacicazgo misisipiano más grande en la costa norte-central del Golfo. Es difícil llegar a pie; sin embargo, habría sido de fácil acceso en canoas, el principal medio de transporte de los pueblos de la región. Se encuentra cerca de la confluencia de los ríos Tombigbee y Alabama. Los arroyos se convierten en un laberinto de ramas y pantanos en la cabecera de la Bahía de Mobile. El sitio era un centro ceremonial para la gente de Pensacola, así como un centro social, político, religioso y comercial para la región del Delta del Mobile-Tensaw y de la costa central del Golfo.1
El sitio de Bottle Creek se cartografió por primera vez en la década de 1880, pero su ubicación en el medio del delta, completamente rodeado por un pantano y oculto por inmensos cipreses, lo hacía inaccesible. Esto lo protegió de la mayoría de los saqueos que ocurrieron en sitios similares en el sureste. Era un centro ceremonial para la gente de LA Cultura Pensacola y servía como puerta de entrada a su sociedad a pesar de su ubicación aparentemente remota. Fue investigado profesionalmente por primera vez en 1932 cuando David L. DeJarnette, del Museo de Historia Natural de Alabama, comenzó su trabajo allí para determinar si el sitio tenía una relación cultural con Moundville, conectado al norte por un sistema fluvial.1 Fue incluido en el Registro Nacional de Lugares Históricos en 1974.2
Acceso
Debido a su ubicación remota, el sitio solo es accesible para los visitantes a través de recorridos en motos acuáticas que salen de Stockton, Alabama. Los recorridos salen todos los días y duran unas 4 horas en barco y de 6 a 8 horas en canoa o kayak. Los viajes consisten en una travesía hacia y desde Mound Island y discusiones interpretativas sobre los pueblos de la Cultura Misisipiana que vivían en Bottle Creek, incluido su deporte, comida, cultura y una visita a la cima del montículo más grande.3



Bottle Creek siguió siendo un sitio importante para los indios locales, como los mobilianos, hasta bien entrado el siglo XVIII, y se cree que el explorador francés y fundador de Mobile Jean-Baptiste Le Moyne de Bienville visitó el sitio en 1702. Ahora es propiedad Por el estado de Alabama, Bottle Creek fue declarado Monumento Histórico Nacional el 10 de marzo de 1995, uniéndose al Parque Arqueológico de Moundville como el único otro sitio nativo americano así reconocido en el estado de Alabama. Es administrado por la Comisión Histórica de Alabama.

Montículo A de Bottle Creek Los pueblos de la cultura de Pensacola estaban relacionados culturalmente con los pueblos del período geográficamente expansivo del Misisipi, que caracterizó una gran parte del sureste a partir del año 1000 aproximadamente. La evidencia arqueológica, incluida la característica cerámica templada con conchas, indica que la cultura de Pensacola se extendió a lo largo del costa desde la Bahía Choctawhatchee en el oeste de Florida hasta el lado este del delta del río Mississippi en Luisiana. La mayor concentración de aldeas y artefactos de Pensacola se produjo a lo largo de Mobile Bay en el delta Mobile-Tensaw y en la parte sur de los valles de los ríos Tombigbee y Alabama.
Investigaciones arqueológicas recientes en el sitio de Bottle Creek muestran que la gente de la cultura Pensacola probablemente se mudó al área desde el norte y el oeste. Los primeros artefactos indican que las personas que vivían en Bottle Creek y otros sitios de la costa del Golfo estaban en estrecho contacto con los pueblos de Moundville a lo largo del río Black Warrior. También hay evidencia de cierta interacción con personas de la cultura Plaquemine (una variante de la cultura del Mississippi) del valle del Bajo Mississippi.
El sitio de Bottle Creek contiene más de 18 montículos, el más alto se eleva aproximadamente 16 metros (52 pies) sobre el pantano. Aunque el sitio se conoce desde hace tres siglos, su aislamiento físico lo ha mantenido relativamente tranquilo. Hasta hace relativamente poco tiempo, se sabía poco sobre el sitio o sus habitantes, aparte de la evidencia clara de que los ocupantes de Bottle Creek probablemente controlaban, o al menos influenciaban, las actividades de un gran número de personas a lo largo de la costa norte del Golfo.
En 1991, el Museo de Historia Natural de Alabama estableció el Gulf Coast Survey para realizar excavaciones en el sitio de Bottle Creek. Los principales objetivos del proyecto eran explorar la historia del sitio y la cambiante vida cultural de sus habitantes. Las excavaciones iniciales en vertederos de basura prehistóricos revelaron fragmentos de cerámica, conchas y herramientas de piedra, así como muchos huesos de animales, que indican a los científicos lo que comía la gente.
Cerámica templada en concha Los investigadores realizaron estas excavaciones para determinar qué tipo de estructura social regía la vida de los habitantes de Bottle Creek y qué cambios se produjeron en su cultura durante los siglos que estuvo ocupado el sitio. Al examinar los artefactos recuperados de varios períodos de la historia del sitio, los arqueólogos pueden catalogar los cambios en el diseño, el material, las técnicas de fabricación y otras características. Por ejemplo, los investigadores han descubierto que las clases dominantes vivían en la cima del Montículo A y que, aunque comían el mismo tipo de alimentos que las clases bajas, la calidad de sus alimentos era mejor. Tenían cortes de carne más finos (como lo demuestran los tipos de huesos recuperados) y grandes cantidades de maíz, e incluso comían mariscos más grandes. La cerámica recuperada del sitio también nos habla sobre la estructura social en Bottle Creek. Las personas que vivían en los pequeños montículos de casas que rodeaban el Montículo A usaban el mismo tipo de cerámica que los nobles, pero parecen haber tenido muchos más recipientes para cocinar que tazones y platos para servir.
Una de las estructuras más intrigantes de Bottle Creek es el Montículo L, una formación inusual en el extremo sur del sitio. Las excavaciones realizadas en 1991 revelaron que el montículo albergaba al menos dos edificios en su cima durante las últimas etapas de construcción, que probablemente tuvieron lugar desde finales del siglo XVI hasta principios del siglo XVIII. Cientos de agujeros para postes indican que había muchos edificios encima del montículo. Desafortunadamente, hay poca evidencia de sus funciones.
Se llevaron a cabo excavaciones adicionales en la gran terraza redondeada que se proyecta en el extremo noreste del Montículo B. Una zanja de prueba, excavada en 1994, mostró con bastante claridad que hubo un grado considerable de ingeniería involucrada en la construcción del Montículo B y la terraza. Claramente, los habitantes de Bottle Creek eran notablemente sofisticados cuando se trataba de mover tierra. Bottle Creek fue probablemente un importante centro religioso durante gran parte de su historia. Es posible que, dada la cantidad de túmulos funerarios encontrados en los bordes exteriores del asentamiento, eventualmente se convirtiera en un centro mortuorio a la manera de Moundville. Pero ¿por qué este lugar remoto en el centro de un pantano atrajo a sus antiguos habitantes? La respuesta a esta pregunta tal vez esté más allá del ámbito de la arqueología.
Moundville, jaguar de Alabama
Etimología de Alabama: La ortística original de esta palabra fue Albaamaha, seguida por Alibamu. Es Itza Maya y significa “Lugar de”. Ha es Chontal e Itza Maya. Significa río. La sílaba “baamá) es irreconocible en varios diccionarios mayas, pero bien podría ser un acortamiento de la palabra para el jaguar, balam. Entonces la traducción sería “Plucéluva del Río Jaguar”. Allí estamos jaguares en la región de la Costa del Golfo hasta finales del Período Colonial. Richard Harlan, contemporáneo del famoso naturalista James Audubon, escribió que los jaguares fueron vistos al este del Mississippi a principios de la década de 1800. Estaban en las Montañas Apalaches del Sur hasta al menos 1737.
Puerto interno de m ontados de Bottle Creek
ontados de Bottle Creek
El montículo A de Bottle Creek fue construido hace más de 500 años y mide 45 pies de altura. (Guy Busby/Press-Register)
En 1702, un joven franco-canadiense trepó un montón de 45 pies en una isla aislada en lo profundo del delta del río Tensaw.
La isla había sido el hogar de hasta 2.000 personas en los 1300 y 1400. Al comienzo de la década de 1700, estaba casi desierto, pero todavía tenía en cuenta la estima por las tribus locales. Un indio, que había pagado con una pistola para guiar al joven al lugar, no se acercaba a los restos de un templo en la parte superior del montículo.
Solo, el joven entró en el templo. En su interior, encontró cinco figuras de arcilla, un hombre, una mujer, un niño, un oso y un búho. Ninguna roca gigante rodó para perseguir al explorador, aunque su guía fue reportado como aterrorizado de que él había tomado los objetos.
Alrededor de 1250, los indios del área de Moundville llegaron al sur y comenzaron a vivir en el sitio. El sitio donde estábamos, Mound A, es el más alto de los 18 montículos de la isla. La estructura probablemente tarda unos 100 años en construirse en etapas, dijo al grupo Greg Waselkov, director del Centro de Estudios Arqueológicos de la Universidad del Sur d e Alabama.
e Alabama.
El templo se fue hace mucho. Bienville envió las figuras de arcilla a Francia y nadie sabe lo que les pasó.
Aislada en el Delta, Mound Island aún guarda misterios. Nadie está seguro de por qué los indios eligieron la ubicación. Una teoría era que querían una parte del lucrativo comercio de conchas entre las tribus costeras y las tribus del interior.
Otra razón pudo haber sido la protección. La zona ya estaba ocupada cuando los indios bajaron del norte y los recién llegados habrían sido considerados invasores. Se han encontrado señales de fortificaciones alrededor de partes de la isla.
Nadie está seguro de dónde vino la materia para los montados. La isla tiene dos áreas donde se cavaba arcilla de fosas, pero los sitios son demasiado pequeños para explicar toda la materia necesaria para construir los montados.
El sitio fue un centro político, cultural y religioso durante unos 300 años, controlando una región desde el Panhandle de Florida hasta el río Mississippi.
Escalar el equivalente a más de cuatro pisos en los lados empinados de la ladera te da un aprecio por la escala de la empresa. Desde lo alto del montaje, se mira hacia abajo en lo que era una comunidad próspera hace más de 700 años.
más de 700 años.
La cultura que construyó los montículos se desvaneció en la época del primer contacto europeo. Incluso sus propios descendientes, los Creeks y Choctaws, estaban desconcertados por los montículos. Hoy en día, el sitio se ve tanto como lo hizo cuando Bienville lo visitó.
Las estructuras que dejaron atrás estaban bien diseñadas, un recordatorio aislado en el Delta de las capacidades de los que vinieron antes que nosotros.
Inundación del río Amarillo
Inundación del río Amarillo 1887
El 28 de diciembre de 1887, el río Amarillo después de varios días de lluvias incesantes desbordó las presas y causó una inundación masiva. Se cree que debido a las tierras bajas cerca de la zona, la inundación se extendió muy rápidamente por todo el norte de China, cubriendo alrededor de 130.000 km2, inundando gran cantidad de asentamientos agrícolas y de comercio. Después de la inundación, dos millones de personas quedaron sin hogar y la falta de elementos esenciales básicos causó un gran número de víctimas, se estima que entre 900.000 y 2 millones de personas en total.
Historia
Durante siglos, los agricultores que vivían cerca del río Amarillo en China habían construido diques para contener los ríos, que con el tiempo crecieron más porque, al no permitir que se inundaran, tenían que depositar su sedimento en el lecho del río. En 1887, este río crecido por días de fuertes lluvias, superó los diques alrededor del 28 de septiembre, provocando una enorme inundación. Dado que no existe una unidad internacional para medir la fuerza de una inundación, generalmente se clasifica según la magnitud del daño causado, la profundidad del agua y el número de víctimas.
Generalmente se cree que las aguas del río Amarillo atravesaron los diques de Huayuankou, cerca de la ciudad de Zhengzhou, en la provincia de Henan. Debido a las llanuras bajas cercanas a la zona, la inundación se extendió muy rápidamente por todo el norte de China, cubriendo aproximadamente 50.000 millas cuadradas (130.000 km2), inundando asentamientos agrícolas y centros comerciales. Después de la inundación, dos millones se quedaron sin hogar.[2] La pandemia resultante y la falta de artículos básicos se cobraron tantas vidas como las que se perdieron directamente a causa de la inundación. Fue una de las peores inundaciones de la historia, aunque la posterior inundación del río Yangtze-Huai en 1931 pudo haber matado hasta cuatro millones de personas.[3] El número de muertos estimado más alto es 2.000.000.[4]
El río Amarillo
El río Amarillo o Huang He es el segundo El río más largo de China (después del río Yangtze) y el séptimo más largo del mundo, con 4.845 km de largo. Originario de las montañas Bayankala en la provincia de Qingh ai en el oeste de China, fluye a través de nueve provincias de China y desemboca en el mar de Bohai. La cuenca del río Amarillo tiene una distancia de este a oeste de 1.900 km y una distancia de norte a sur de 1.100 km.
ai en el oeste de China, fluye a través de nueve provincias de China y desemboca en el mar de Bohai. La cuenca del río Amarillo tiene una distancia de este a oeste de 1.900 km y una distancia de norte a sur de 1.100 km.
El área total de la cuenca es de 752,443 km². Se le llama “Río Amarillo” por el color amarillo ocre del agua fangosa en el curso inferior del río. El río transporta 1,6 mil millones de toneladas de limo (loess) anualmente en el punto donde desciende de la meseta de Loess, y deposita limo en su lecho donde fluye lentamente. Los depósitos de limo son muy fértiles y el área produce la mitad del algodón de China y más de la mitad del trigo de China.
El río Amarillo se llama el “río madre de China” y “la cuna de la civilización china”. Miles de sitios arqueológicos del período Neolítico (c. 12.000 a 2.000 a.C.) indican que la agricultura establecida comenzó en China debajo del recodo sur del río Amarillo. La dinastía Shang floreció en el valle bajo del río Amarillo desde 1750 hasta 1040 a. C.
El río Amarillo también se llama “El dolor de China” porque es extremadamente propenso a las inundaciones. Entre 602 a.C. y 1938, se inundó 1.593 veces y cambió de rumbo 26 veces. Las dificultades causadas por las inundaciones han tenido una influencia significativa en la historia de China. En 1955, el gobierno de la República Popular China desarrolló un plan para controlar las inundaciones y generar energía eléctrica. Se han plantado árboles y se han represado los afluentes de la cuenca del río Amarillo en un esfuerzo por controlar el flujo del río, y desde 1960 se han abierto más de una docena de centrales hidroeléctricas.
Características
El río Amarillo se destaca por la gran cantidad de limo que transporta, 1.600 millones de toneladas anuales en el punto donde desciende de la meseta de Loess. Si corre hacia el mar con un volumen suficiente, se transportan 1.400 millones de toneladas al mar.
Debido a su gran carga de limo, el río Amarillo es un arroyo depositante: es decir, deposita parte de su carga de suelo en su lecho en tramos donde fluye lentamente. Estos depósitos elevan el cauce del río, que fluye entre diques en sus tramos inferiores. A lo largo de la historia, los campesinos chinos han construido diques de tierra cada vez más altos, de hasta seis metros en algunos lugares, para contener el flujo del río.
Cuando ocurre una inundación, el río puede salir de los diques hacia la llanura de inundación inferior circundante y adoptar un nuevo curso. Históricamente, esto ha ocurrido aproximadamente una vez cada cien años. En los tiempos modernos, se ha realizado un esfuerzo considerable para fortalecer los diques naturales y controlar las inundaciones.
Los depósitos de limo son muy fértiles y el área produce la mitad del algodón de China y más de la mitad del trigo.
El delta del río Amarillo tiene un total de 8.000 kilómetros cuadrados. Sin embargo, desde 1996 se ha informado que se está reduciendo ligeramente cada año, debido a la erosión.
Geografía
Desde sus fuentes, el lago Gya ring y el lago Ngoring, en lo alto de las montañas Bayankala en la provincia de Qinghai en la meseta de Qinghai-Tíbet en el extremo oeste de China, el río Amarillo gira hacia el norte, se dobla hacia el sur, creando la “Gran Curva” y luego fluye generalmente hacia el este a través del norte de China hasta el golfo de Bohai, drenando una cuenca de 752,443 km², que sostiene a 120 millones de personas. La cuenca del río Amarillo tiene una distancia de este a oeste de 1.900 km y una distancia de norte a sur de 1.100 km.
ring y el lago Ngoring, en lo alto de las montañas Bayankala en la provincia de Qinghai en la meseta de Qinghai-Tíbet en el extremo oeste de China, el río Amarillo gira hacia el norte, se dobla hacia el sur, creando la “Gran Curva” y luego fluye generalmente hacia el este a través del norte de China hasta el golfo de Bohai, drenando una cuenca de 752,443 km², que sostiene a 120 millones de personas. La cuenca del río Amarillo tiene una distancia de este a oeste de 1.900 km y una distancia de norte a sur de 1.100 km.
El río se divide comúnmente en tres tramos. Diferentes académicos tienen distintas opiniones sobre el criterio de división.
Los limos recibidos de los tramos medios forman sedimentos aquí, elevando el lecho del río. Durante 2000 años de construcción de diques, los depósitos de sedimentos excesivos han elevado el lecho del río varios metros por encima del suelo circundante. Pocos afluentes se suman al caudal en esta etapa; casi todos los ríos del sur desembocan en el río Huai, mientras que los del norte desembocan en el río Hai.
Provincias y ciudades del río Amarillo
Originario de las montañas Bayankala, el río Amarillo pasa ahora por nueve provincias chinas, Qinghai, Sichuan, Gansu, Ningxia, Mongolia Interior, Shaanxi, Shanxi, Henan y Shandong. La desembocadura del río Amarillo se encuentra en Dongying, Shandong.
Las provincias de Hebei y Henan derivan sus nombres del Huang He. Sus nombres significan respectivamente “norte” y “sur” del río (Amarillo).
Las principales ciudades ubicadas a lo largo del río Amarillo incluyen, a partir de la fuente: Lanzhou, Wuhai, Baotou, Kaifeng y Jinan.
Inundaciones
Las inundaciones en el río Amarillo representan algunos de los desastres naturales más mortíferos jamás registrados en la historia de la humanidad. La llanura de la llanura del norte de China contribuye a la letalidad de las inundaciones. Un ligero aumento del nivel del agua cubre por completo una gran parte de la tierra en el agua; cuando ocurre una inundación, una parte de la población muere inicialmente por ahogamiento, seguida de muertes por enfermedades propagadas por la inundación y luego la consiguiente hambruna.
En 1887, el río inundó la llanura del norte de China causando entre 900.000 y 2.000.000 de muertes.
En 1931, el río inundó la llanura del norte de China y provocó entre 1.000.000 y 4.000.000 de muertes.
En 1938, durante la Segunda Guerra Chino-Japonesa, las tropas nacionalistas bajo las órdenes de Chiang Kai-Shek volaron los diques que contenían el río Amarillo en Huayankou, provincia de Henan, para detener el avance de las tropas japonesas. Esto resultó en la inundación de un área de 54.000 km² y la muerte de 500.000-900.000 personas. Otros 11 millones se quedaron sin comida ni refugio. El dique fue reparado en 1947.
En 1955, el gobierno de la República Popular China desarrolló un plan para controlar las inundaciones y generar energía eléctrica, que incluía proyectos de conservación de agua a gran escala en los tramos superiores del río. Se han plantado árboles y se han represado los afluentes de la cuenca del río Amarillo en un esfuerzo por controlar el flujo del río.
Desde 1972, los tramos inferiores del río Amarillo, desde Jinan hasta el mar, se han secado casi todos los años; en 1997 el período seco persistió durante 226 días. El bajo volumen de agua se debe a una mayor demanda de riego, que se multiplicó por cinco desde 1950. En 1999, el agua desviada del río sirvió a 140 millones de personas e irrigó 74.000 km² de tierra. El mayor volumen de agua ocurre durante la temporada de lluvias, de julio a octubre, cuando fluye el 60 por ciento del volumen del río, pero se necesita agua para riego entre marzo y junio.
Se han construido varias presas para capturar el exceso de agua para su uso cuando sea necesario y para el control de inundaciones y la generación de electricidad, pero debido a la alta carga de sedimentos, se espera que su vida sea limitada. Un Proyecto de Transferencia de Agua Sur-Norte propuesto involucra varios esquemas para desviar el agua del río Yangtze, uno en las cabeceras occidentales de los ríos donde están más cerca el uno del otro, otro de los tramos superiores del río Han y un tercero usando el ruta del Gran Canal.
Los desastres naturales son fenómenos trágicos q ue suelen afectarnos de forma aleatoria y poco frecuente, pero no fue así para los habitantes del valle por donde atraviesa el río Huang He (popularmente referido como el Río Amarillo) en China. En un lapso de poco más de medio siglo, entre 1887 y 1943, una cantidad cercana a los 10 millones de personas murieron ahogadas, en hambrunas o por enfermedades resultado de inundaciones catastróficas en este lugar.
ue suelen afectarnos de forma aleatoria y poco frecuente, pero no fue así para los habitantes del valle por donde atraviesa el río Huang He (popularmente referido como el Río Amarillo) en China. En un lapso de poco más de medio siglo, entre 1887 y 1943, una cantidad cercana a los 10 millones de personas murieron ahogadas, en hambrunas o por enfermedades resultado de inundaciones catastróficas en este lugar.
Aunque apocalípticas, este tipo de inundaciones no eran novedad en el Huang He. Antes de la construcción de presas modernas que inició en 1943, los chinos habían registrado más de 1,500 inundaciones, lo que le valió a este sitio el mote de “el pesar de China”. En varias partes del mundo es posible encontrar valles con una mayor densidad de población, como sucede en el Yangtsé, por ejemplo. Y hay ríos que se inundan con mucha mayor frecuencia, como el Nilo. Incluso están los que llevan un mayor caudal de agua, como el Amazonas. ¿Entonces, por qué el Huang He fue tan mortal?
Las grandes tragedias.
Y así se mantuvo hasta el año de 1887, cuando una serie de lluvias record en primavera y la nieve derretida lo forzaron a rebasar los diques de más de 18 metros de altura. El agua que fluía desde la parte posterior de los diques los erosionó rápidamente y permitió que todo el río, en ese punto con más de 1.6 kilómetros de ancho, se saliera hacia la llanura aluvial. La inundación terminó con la vida de decenas de miles de personas y los daños en los cultivos a las granjas cercanas se cobraron la vida de más de un millón de habitantes.
Este desastre hubiera sido el más mortífero (sin incluir la peste) en la historia registrada si no fuera por otra inundación que sucedió tan solo 44 años después. En 1931, el Huang He reclamó entre 850 mil y 4 millones de vidas en lo que sigue considerándose el peor desastre natural de la historia.
Mapamundi de Leonardo
Mapamundi de Leonardo
Recreación del llamado mapamundi de Leonardo da Vinci.
El llamado Mappamundi de Leonardo da Vinci es un mapa “tipo octante” fechado aproximadamente en 1514 que se ha pretendido relacionar con el descubrimiento de América o, cuando menos, con los primeros usos del nombre. Henry Harrise en su obra de 1892 alude a la imposibilidad de que el mapa, en realidad: “sections of a rude and elementary globe” recogidos entre los papeles de Leonardo da Vinci conservados en Londres, hubiese sido dibujado por el propio Leonardo, siendo citado por Eugène Müntz1 diciendo acerca de la opinión de R. H. Major sobre la autoría de Leonardo:“an opinion NOW entirely abandoned2 > -NOW = en esa actualidad del año 1898-“,3ya que a partir de Nordenskjold, con él, en el siglo XX, media docena de autores han dicho lo contrario, y en el siglo XXI, en 2014, la autoría de la proyección octante por parte de Leonardo habría quedado demostrada por Christopher Tyler,4 De hecho, hay un boceto de la misma en una página de los manuscritos del Codex Atlanticus, hecho de la mano de Leonardo, siendo el boceto de Leonardo, la primera descripción conocida de la proyección octante.
El mapa fue publicado en 1865 por R. H. Major que defendió la autoría de Leonardo da Vinci, destacando la temprana utilización del nombre de América, propuesto por Hylacomilus en 1507,5cuyo mapa, no fue descubierto hasta 1901, por lo tanto la aseveración de Major era cierta en 1865.6
Descripción
La esfera del mundo está dividida en ocho triángulos esféricos equiláteros, cada sección delimitada por la línea ecuatorial y dos meridianos con 90% de diferencia. Este fue el primer mapa de este tipo. Algunos críticos creen que el mapa no fue realmente obra del mismo Leonardo, ya que la precisión y la maestría en el dibujo no reflejan los altos estándares usuales de da Vinci. Fue hecho probablemente por algún empleado de confianza o copista del taller de Leonardo.’6
Lo documentó R.H. Major en su comunicado Memoir on a mappemonde by Leonardo da Vinci, being the earliest map hitherto known containing the name of America7
Historia sobre la autoría
Esbozo de Leonardo de la proyección octante en el Codex Atlanticus (1508)
Aunque la autoría de la primera descripción de la proyección Da Vinci octant por parte de Leonardo habría quedado demostrada en el informe de Christofer Tyler,,8 que decidió tratar por separado la autoría de la proyección octante (1508) y la autoría del mapa de Leonardo (1514), los otros autores anteriores a él tratan conjuntamente la autoría de ambos (autoría del mapa y autoría de la proyección -sin separar el uno de la otra-), hablan de “..the eigth of a supposed globe represented in a plane..” o sobre “globe sections” (Harrisse) y otros les llaman “gores”, que constituyen, de hecho, una proyección del globo (hay un error en la traducción de 2005 de Muntz al castellano, videt: “…fragmentos de una pequeña esfera tosca y elemental..” en lugar de “sections of a rude, elementary globe” -sections implica proyección… fragmentos no, aparte que lo hace incompleto-).
Entre estos estudiosos, la autoría de Leonardo no está universalmente aceptada, con algunos autores completamente en contra de cualquier mínima contribución de Leonardo, como, Henry Harrisse (1892),9 o Eugène Müntz (1898 – citando la autoridad de Harrisse de 1892),10
Otros eruditos aceptan explícitamente ambos (tanto del mapa como de la proyección), totalmente como un trabajo Leonardo, describiéndolos como los primeros de este tipo, entre ellos, R.H. Major (1865) en su trabajo, Memoir on a mappemonde by Leonardo da Vinci, being the earliest map hitherto known containing the name of America (“..the eigth of a supposed globe represented in a plane..” ),11 Grothe,12 la “Enciclopedia universal ilustrada europeo-americana”(1934),13 Snyder en su libro “Flattening the earth” (1993),14 Christoher Tyler en su trabajo Leonardo da Vinci’s World Map (2014),8 José Luis Espejo en su libro “Los mensajes ocultos de Leonardo Da Vinci” (2014),15 o David Bower en su libro “The unusual projection for one of John Dee’s maps of 1580” (2012).16
Otros también aceptan explícitamente como auténticos (tanto el mapa como la proyección), aunque dejando en el aire la mano directa de Leonardo, entregando la autoría de toda la obra a uno de sus discípulos, como Nordenskjold resume en su libro “Facsimile-Atlas” (1889), confirmado además por Dutton (1995) y muchos otros: “..on account of the remarkable projection..not by Leonardo himself, but by some ignorant clerk.”,17 o Keunig (1955) que llega a ser más preciso: “..by one of his followers at his direction..”.18
Mapa “tipo octante” de la Windsor Library


Recreación del nuevo continente americano en el mapa de Leonardo. Compárese con el mapa de Cantino (1502), que representa los viajes hasta esa fecha de Americo Vespucio.
Cuando Leonardo da Vinci dividió el mundo en ocho partes
Es ya un tópico, pero no hay cuestión que Leonardo da Vinci parezca que no hubiera tratado, aunque fuere de forma superficial. Y, en efecto, también le interesaban los mapas. En el Codex Atlanticus, que viene a ser una especie de compendio de papeles diversos de Leonardo dispuesto en varios volúmenes y conservado en la Biblioteca Ambrosiana de Milán, aparecen esbozos de diversos tipos de proyección cartográfica. La mayoría eran conocidos en su tiempo, pero una en particular parece ser obra de Leonardo o, al menos, introdujo  en ella ciertos elementos originales, aunque ha habido polémicas sobre ello (algunos autores afirman que ya se había contemplado el uso de este tipo de proyección anteriormente). El dicciónario de la RAE define un octante como:
en ella ciertos elementos originales, aunque ha habido polémicas sobre ello (algunos autores afirman que ya se había contemplado el uso de este tipo de proyección anteriormente). El dicciónario de la RAE define un octante como:
Instrumento astronómico del tipo del quintante y del sextante, y de análoga aplicación en barcos y aviones, cuyo sector comprende solo 45 grados o la octava parte del círculo.
Proyección en «octantes» propuesta por Leonardo da Vinci.
La proyección más curiosa de las utilizadas por Leonardo era, precisamente, la que es conocida como «proyección en octantes», con un esbozo inicial del año 1508 y un mapa más elaborado en 1514. Esta proyección dividía el mundo en ocho partes a modo de triángulos de Reuleaux1, como si un trébol de cuatro hojas se tratara para cada hemisferio. Como puede verse en la imagen que aparece a continuación, la esfera del globo terrestre está dividida en ocho triángulos esféricos equiláteros. Curiosamente, fue uno de los primeros mapas en los que se menciona a América por su nombre y, también, uno de los primeros en colocar la Antártida, aunque más como un caso de imaginaria «Terra Australis» que como algo real. El dibujo parece ser, según los expertos, obra de algún copista que hubiera trabajado bajo encargo del propio Leonardo.
de Reuleaux1, como si un trébol de cuatro hojas se tratara para cada hemisferio. Como puede verse en la imagen que aparece a continuación, la esfera del globo terrestre está dividida en ocho triángulos esféricos equiláteros. Curiosamente, fue uno de los primeros mapas en los que se menciona a América por su nombre y, también, uno de los primeros en colocar la Antártida, aunque más como un caso de imaginaria «Terra Australis» que como algo real. El dibujo parece ser, según los expertos, obra de algún copista que hubiera trabajado bajo encargo del propio Leonardo.
A principios del siglo XX el cartógrafo e ingeniero Joseph Stanislaus Cahill dio una vuelta de tuerca al concepto con su proyección tipo «mariposa», cuya evolución más refinada dio lugar a la proyección Cahill–Keyes.
La proyección «en mariposa» de Cahill en un documento de 1919.
OSO
OSO
Observatorio Solar en Órbita
El Programa del Observatorio Solar en Órbita (abreviado OSO) era el nombre de una serie de telescopios espaciales estadounidenses destinados principalmente a estudiar el Sol, aunque también incluían importantes experimentos no solares. Ocho fueron lanzados con éxito a la órbita terrestre baja por la NASA entre 1962 y 1975 utilizando cohetes Delta . Su misión principal era observar un ciclo de manchas solares de 11 años en espectros de rayos X y UV. Los siete iniciales (OSO 1–7) fueron construidos por Ball Aerospace, entonces conocida como Ball Brothers Research Corporation (BBRC), en Boulder, Colorado.[1] OSO 8 fue construido por Hughes Space and Communications Company, en Culver City, California.

OSO 4
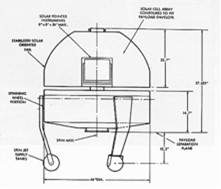
Diagrama del observatorio solar en órbita

Un cohete Delta lanzando OSO 8 el 21 de junio de 1975, en Cabo Cañaveral, Florida
Historia
El diseño básico de toda la serie presentaba una sección giratoria, la “Rueda”, para proporcionar estabilidad giroscópica. Una segunda sección, la “Vela”, fue impulsada eléctricamente contra la rotación de la Rueda y estabilizada para apuntar al Sol. El Sail llevaba instrumentos solares puntiagudos y también el conjunto de células solares fotovoltaicas que alimentaban la nave espacial. El cojinete crítico entre la rueda y la vela fue una característica importante del diseño, ya que tenía que funcionar sin problemas durante meses en el duro vacío del espacio sin la lubricación normal. También transportaba la energía de la Vela y los datos de los instrumentos solares puntiagudos a la Rueda, donde se ubicaban la mayoría de las funciones de la nave espacial. Los instrumentos científicos adicionales también podrían ubicarse en la Rueda,
OSO B sufrió un incidente durante las actividades de integración y verificación el 14 de abril de 1964. El satélite estaba dentro de la instalación de prueba de giro en Cabo Cañaveral conectado a la tercera etapa de su impulsor Delta C cuando un técnico encendió accidentalmente el impulsor a través de electricidad estática. El motor de la tercera etapa se activó, se lanzó a sí mismo y al satélite hacia el techo y rebotó en un rincón de la instalación hasta que se quemó. Tres técnicos murieron calcinados. El satélite, aunque dañado, pudo repararse utilizando una combinación de piezas prototipo, repuestos de vuelo y componentes nuevos. Fue lanzado diez meses después, el 3 de febrero de 1965, y fue designado OSO 2 en órbita.[2]
OSO C nunca llegó a la órbita. El despegue tuvo lugar el 25 de agosto de 1965 y todo salió bien durante la quema de la segunda etapa. Durante la fase de inercia previa a la separación de la tercera etapa, su motor cohete se encendió prematuramente. Esto se registró en las lecturas en tierra como una perturbación de actitud seguida de la pérdida de la telemetría de la segunda etapa, y aunque la tercera etapa logró separarse, sufrió una caída del 18% en el empuje. La nave espacial OSO no pudo alcanzar la velocidad orbital y, en cambio, volvió a caer a la atmósfera y se quemó. Se sospechó que la falla fue causada por una modificación en el mecanismo de encendido en la tercera etapa después de algunas dificultades técnicas menores experimentadas en el lanzamiento anterior de Delta C (TIROS 10 el 2 de julio).[3]
| Designacion | Fecha de lanzamiento | fecha de reingreso | Resultados notables |
| OSO 1 (OSO A) | 7 de marzo de 1962 | 7 de octubre de 1981 [4] | |
| OSO 2 (OSO B2) | 3 de febrero de 1965 | 8 de agosto de 1989 [5] | |
| OSO 3 (OSO E1) | 8 de marzo de 1967 | 4 de abril de 1982 [6] | Se observaron llamaradas solares del Sol, así como una llamarada de Scorpius X-1 [7] [8] |
| OSO 4 (OSO D) | 18 de octubre de 1967 | 14 de junio de 1982 [9] | |
| OSO 5 (OSO F) | 22 de enero de 1969 | 2 de abril de 1984 [10] | Radiación difusa de rayos X de fondo medida de 14 a 200 keV [11] [12] |
| OSO 6 (OSO G) | 9 de agosto de 1969 | 7 de marzo de 1981 [13] | Observó tres instancias de coincidencias de rayos X duros con estallidos de rayos gamma. [14] |
| OSO 7 (OSO H) | 29 de septiembre de 1971 | 8 de julio de 1974 [15] | Erupciones solares observadas en el espectro de rayos gamma. Los datos recopilados permitieron la identificación de Vela X-1 como un binario de rayos X de alta masa. [16] [17] |
| OSO 8 (OSO I) | 21 de junio de 1975 | 8 de julio de 1986 [18] | Encontró una línea de emisión de hierro en el espectro de rayos X de un cúmulo de galaxias. [19] |
El programa del Observatorio Solar en Órbita Avanzada (AOSO) se desarrolló a mediados de la década de 1960 como una versión más avanzada de la serie OSO. Concebida como un sistema de satélites en órbita polar, esta nave espacial monitorearía continuamente el Sol y el entorno circundante con detectores e imágenes electrónicas que van desde rayos X hasta luz visual. Debido a restricciones presupuestarias, el programa AOSO se canceló en 1965. En cambio, fue reemplazado por los satélites OSO-I, OSO-J y OSO-K. Solo se lanzó OSO-I, que se convirtió en OSO 8.[20]
Se desarrolló y lanzó otro satélite que utiliza la plataforma Orbiting Solar Observatory: el satélite Solwind. Fue lanzado el 24 de febrero de 1979. Fue operado por el Programa de prueba espacial del Departamento de Defensa. Fue destruido el 13 de septiembre de 1985 en una prueba de misiles ASAT.
OSO 1
Descripción general de la misión
El primero de una serie de 8 observatorios solares en órbita lanzados con éxito (OSO 1) se lanzó el 7 de marzo de 1962. La nave espacial de 200 kg tenía una sección de rueda giratoria de 9 lados de 1,2 m de diámetro unida a una sección de vela en forma de abanico. Se puso en una órbita aproximadamente circular a ~ 575 km de altitud, 32,8 grados de inclinación. Los principales objetivos de su misión eran medir la radiación electromagnética solar en las regiones de rayos ultravioleta, rayos X y rayos gamma. En segundo lugar, fue para investigar las partículas de polvo en el espacio. La transmisión de datos finalizó el 6 de agosto de 1963. El satélite volvió a entrar en la atmósfera terrestre el 8 de octubre de 1981.
Instrumentación

Hubo una serie de experimentos de rayos X y rayos gamma a bordo de OSO 1 para realizar observaciones solares. Sin embargo, un instrumento, el Experimento de rayos gamma de la Universidad de Minnesota, fue diseñado para proporcionar mediciones preliminares de la intensidad y las propiedades direccionales de los rayos gamma de baja energía en el espacio. El detector operó en el rango de 50 keV – 3 MeV. Para el rango de 50-150 keV, un cristal de centelleo de NaI(Tl) monitoreaba la radiación a través de un escudo de plomo. El detector que opera en las regiones de energía de 0,3-1,0 MeV y 1,0-3,0 MeV utilizó dos centelleadores conectados como un telescopio de coincidencia Compton.
Ciencias
El experimento de rayos gamma de la Universidad de Minnesota en OSO 1 produjo una medida del flujo de rayos gamma extraterrestres entre 0,5 y 3,0 MeV y una indicación de su origen en la esfera celeste. Igualmente importante, este experimento comenzó a definir los problemas de fondo encontrados en la astronomía de rayos gamma.
Saber más:
Tormenta de nieve en Irán
Tormenta de nieve en Irán 1972
Localización
País: Iran
Regiones afectadas: Oeste
Detalles de contacto: 36 ° 14 ′ 47 ″ N, 46 ° 15 ′ 59 ″ E
Características
Tipo: Nevada
Altura de la nieve: 7,9 metros
Fecha de formación: 3 de febrero de 1972
Fecha de disipación: 9 de febrero de 1972
Consecuencias
Número de muertes: 4000
Destrucción notable: 200 pueblos borrados del mapa
Irán, mapa de ubicación
Evolución meteorológica
Una serie de tormentas de nieve a finales de enero ya habían provocado acumulaciones sobre el oeste de Irán. Pasando de Azerbaiyán a Irán entre el 3 y el 8 de febrero, esta ventisca dejó 7,9 metros de nieve, el equivalente a un edificio de dos pisos y medio. Los vientos y la nieve provocaron la rotura de árboles y corrientes de agua. La nieve ha enterrado los rieles, carreteras y muchos pueblos, así como vehículos aplastados bajo su peso.
En el punto álgido de la tormenta, las autoridades estimaron que una región que abarcaba todo el oeste de Irán estuvo nevada durante una semana. Se interrumpió el suministro de alimentos y medicinas y la temperatura bajó a -25 ° C, lo que hizo muy precaria la supervivencia de las víctimas. Para complicar las cosas, una epidemia de influenza ha afectado a las zonas rurales desde el comienzo del invierno, y ya ha causado la muerte de varias personas.
El 9 de febrero, durante una pausa de 24 horas, los rescatistas que llegaron en helicópteros pudieron llegar a parte de la región. Donde había aldeas, encontraron inmensos ventisqueros que tuvieron que excavarse para encontrar a menudo solo cuerpos congelados. En la aldea de Sheklab, encontraron dieciocho cadáveres antes de que azotara otra tormenta de nieve el 11 de febrero, lo que obligó a los rescatistas a evacuar.
Los helicópteros del ejército dejaron caer dos toneladas de comida, en forma de panes y dátiles, esparcidos en ventisqueros alrededor de las aldeas con la esperanza de que los residentes pudieran repostar si pudieran hacer un túnel desde su tumba blanca. Pocos pudieron beneficiarse de él, en el pueblo de Sheklab nadie sobrevivió de una población de 100 personas.
La tormenta de nieve de Irán de febrero de 1972 fue la tormenta de nieve más mortífera de la historia, según recoge el Libro Guinness de los Récords.[1][2] Un período de una semana de bajas temperaturas y severas tormentas invernales, que duró del 3 al 9 de febrero de 1972, provocó la muerte de más de 4.000 personas.[3] Las tormentas arrojaron más de 7,9 metros (25 pies 11 pulgadas) de nieve en zonas rurales del noroeste, centro y sur de Irán.[4] La tormenta de nieve llegó después de cuatro años de sequía.[5]
severas tormentas invernales, que duró del 3 al 9 de febrero de 1972, provocó la muerte de más de 4.000 personas.[3] Las tormentas arrojaron más de 7,9 metros (25 pies 11 pulgadas) de nieve en zonas rurales del noroeste, centro y sur de Irán.[4] La tormenta de nieve llegó después de cuatro años de sequía.[5]
Personas ayudando a un coche accidentado algunos días antes del apogeo de la tormenta de nieve en Irán en 1972
Tipo: Ciclón extratropical
Tormenta invernal
Ventisca
Daño: ≥ 20 millones de dólares
El sur de Irán recibió hasta 7,9 metros (26 pies) de nieve, enterrando al menos a 4.000 personas. Según informes contemporáneos del periódico Ettela’at, la ciudad de Ardakan y las aldeas periféricas fueron las más afectadas, sin supervivientes en Kakkan o Kumar. En el noroeste, cerca de la frontera con Turquía, fue enterrado el pueblo de Shaklabad y sus 100 habitantes. Según algunos expertos, alrededor de 200 pueblos quedaron sepultados bajo la nieve y completamente borrados del mapa.[6][7]
Los eventos 
Una parte de la primera página del periódico Etella’at publicada el 13 de febrero de 1972 durante la tormenta de nieve de Irán de 1972. Los títulos incluyen “60 personas asfixiadas bajo la nieve”, en referencia a la tormenta de nieve de 1972 en Irán, y ” Rey y Reina en Saint Moritz “.
A finales de enero ya se habían acumulado una serie de tormentas de nieve sobre el oeste de Irán. Al pasar de Azerbaiyán a Irán entre el 3 y el 8 de febrero, la tormenta de nieve dejó hasta 8 metros (26 pies) de nieve.[1] El viento y la nieve provocaron la rotura de árboles y líneas eléctricas. La nieve enterró vías, carreteras y muchas aldeas, y aplastó vehículos bajo su peso.
En el punto álgido de la tormenta, las autoridades estimaron que una región que incluía todo el oeste de Irán estuvo bajo la nieve durante una semana.[1] El suministro de alimentos y medicinas se agotó y la temperatura se desplomó a -25 °C (-13 °F), lo que hizo incierta la supervivencia de las víctimas de la tormenta de nieve. Además, a principios del invierno una epidemia de gripe comenzó a afectar a las zonas rurales y ya se cobró varias vidas.[1]
La tormenta de nieve cortó la conec tividad de cientos de aldeas en Azerbaiyán; 20 autobuses que transportaban personas quedaron atrapados a ambos lados del paso de montaña de Heyran y un autobús que transportaba a 30 pasajeros se estrelló en el paso de montaña de Heyran, matando a todos sus pasajeros. Las tropas del ejército soviético llegaron demasiado tarde para rescatar a los ciudadanos soviéticos que habían quedado atrapados. Se produjeron avalanchas en la carretera de Chalus y se cortó el suministro eléctrico en el puerto de Anzali. Cientos de pasajeros y conductores quedaron atrapados en las carreteras y las principales carreteras del país y el tren de Azerbaiyán quedaron detenidos. Algunas personas en Tabriz se desmayaron de frío. Los pilotos de aviones extranjeros no se atrevieron a aterrizar en Mehrabad y los ciudadanos de Hamadan quedaron atrapados en sus casas. Se cerraron escuelas en 15 ciudades, al igual que muchos otros eventos que fueron noticia.[8]
tividad de cientos de aldeas en Azerbaiyán; 20 autobuses que transportaban personas quedaron atrapados a ambos lados del paso de montaña de Heyran y un autobús que transportaba a 30 pasajeros se estrelló en el paso de montaña de Heyran, matando a todos sus pasajeros. Las tropas del ejército soviético llegaron demasiado tarde para rescatar a los ciudadanos soviéticos que habían quedado atrapados. Se produjeron avalanchas en la carretera de Chalus y se cortó el suministro eléctrico en el puerto de Anzali. Cientos de pasajeros y conductores quedaron atrapados en las carreteras y las principales carreteras del país y el tren de Azerbaiyán quedaron detenidos. Algunas personas en Tabriz se desmayaron de frío. Los pilotos de aviones extranjeros no se atrevieron a aterrizar en Mehrabad y los ciudadanos de Hamadan quedaron atrapados en sus casas. Se cerraron escuelas en 15 ciudades, al igual que muchos otros eventos que fueron noticia.[8]
Una parte de la primera página del periódico Etella’at publicada el 23 de enero de 1972 durante la tormenta de nieve de Irán de 1972, la tormenta de nieve más mortífera de la historia. Algunos de los títulos decían: “Condiciones inusuales en Teherán debido a las fuertes nevadas y al frío” y “La nieve cortó la conexión entre 3.750 aldeas en la provincia de Azerbaiyán”.





Bartolomé Colón
Bartolomé Colón

Nombre de nacimiento: Bartolomeo Colombo
Nacimiento: 13 de septiembre de 1460: Ciudad de Génova; República de Génova
Fallecimiento: 11 de diciembre de 1514; Ciudad de Concepción de la isla La Española, Virreinato colombino; Corona de Castilla
Nacionalidad: Genovesa
Familia
Padres: Domingo Colombo; Susana Fontanarrosa
Familiares
- Cristóbal Colón (hermano mayor)
- Giacomo Colombo (hermano menor)
- Diego Colón y Perestrelo (sobrino)
- Hernando Colón y Enríquez de Arana (sobrino)
- Luis Colón de Toledo (sobrino nieto)
Información profesional
Ocupación: Navegante, cartógrafo y gobernante colonial
Bartolomé Colón, nombre en italiano Bartolomeo Colombo (Génova,1234567813 de septiembre de 1460–Concepción de la isla La Española, 11 de diciembre de 1514), fue un navegante y cartógrafo genovés, hermano de Cristóbal y Diego Colón, primer adelantado y segundo gobernador general de Indias, además de colaborador de su hermano mayor en sus viajes.
Biografía
Origen familiar y primeros años
Hijo de Domenico Colombo y Susanna Fontanarossa, es el hermano menor del mucho más conocido Cristóbal Colón. Como en el caso de su hermano mayor, el lugar de su nacimiento ha sido discutido. De sus declaraciones en los «pleitos colombinos» se desprende que pudo nacer hacia 1462.
Se mudó con Cristóbal a Portugal después de 1480. Trabajó como cartógrafo en Lisboa,9 uno de los principales centros de conocimientos náuticos y cartográficos de la época, junto con su hermano Cristóbal, con el que compartía la llamada «empresa de las Indias», plan para abrir una vía alternativa al comercio de las especias procedentes de las Indias orientales, mediante la navegación por el oeste hasta alcanzar Asia.
Es posible que participase en la expedición de Bartolomé Díaz al cabo de Buena Esperanza entre 1487 y 1488. A su regreso marchó a Inglaterra y Francia, mientras Cristóbal se establecía en España, con objeto de intentar persuadir a los respectivos monarcas de iniciar esta empresa.
Adelantado y gobernador general de Indias
Trabajaba como cartógrafo al servicio de Ana de Francia cuando a mediados de 1493 le llegó una carta de su hermano comunicándole el descubrimiento y llamándole a reunirse con él en Barcelona. Cuando Bartolomé llegó a la ciudad condal Cristóbal ya había partido para su segundo viaje.
Financiado por la corona española, que puso a sus órdenes una pequeña flota, pudo viajar a la isla de La Española donde llegó el 24 de junio de 1494. Permaneció en la isla durante seis años y medio (1494-1500) quedando como gobernador general con el título de adelantado durante la ausencia de su hermano, que en junio de 1496 retornaba a España tras el segundo viaje.
Entre 1496 y 1498, exploró la desembocadura del río Ozama, en la costa sur de la isla y fundó la ciudad de Nueva Isabela, en la orilla oriental del río Ozama, devastada por un ciclón y refundada en 1502 en la orilla opuesta por el nuevo gobernador Nicolás de Ovando, quien la bautizó con el nombre de Santo Domingo de Guzmán, el actual Santo Domingo, capital de la República Dominicana.
En 1497, en ausencia de su hermano, estalló la revuelta encabezada por Francisco Roldán al frente de un grupo de descontentos por no haber percibido sus pagas. Tras intentar hacerse con la única carabela que se encontraba en el puerto, Roldán y los suyos se refugiaron en el interior de la isla, cometiendo todo género de tropelías. De vuelta en Santo Domingo en agosto de 1498 Cristóbal Colón pactó un acuerdo con Roldán, enviando ambos sus informes a la Corona. Colón reclamó también el envió de funcionarios reales.10
Pero todavía estallaron nuevos enfrentamientos en los que Roldán volvía a ser protagonista. Bartolomé Colón hizo encerrar a dieciséis revoltosos en un pozo. En esas circunstancias llegó a la isla el 23 de agosto de 1500 Francisco de Bobadilla, con cargo de juez pesquisidor y gobernador de La Española.10
Prisión y confiscación de los bienes
Al llegar Bobadilla a Santo Domingo únicamente se encontraba allí su otro hermano Diego Colón. Dos días más tarde hizo leer en la iglesia su nombramiento, exigiendo a Diego la liberación de los presos. Como este se negó a reconocer su autoridad, alegando que el título de almirante de su hermano estaba por encima, Bobadilla ordenó su prisión y la confiscación de los bienes de los hermanos.11
Tras tomar posesión de la fortaleza, Bobadilla liberó a sus presos e inició una investigación secreta en la que participaron todos los enemigos de los Colón. En sus pesquisas Bobadilla interrogó a veintidós testigos acerca de si los Colón habían intentado sublevarse contra él, si impedían el bautismo de los indígenas y sobre el modo de impartir justicia.11
En septiembre, requerido por Bobadilla, Cristóbal se presentó en Santo Domingo y escribió a su hermano Bartolomé, quien se encontraba en Jaragua con Roldán reprimiendo una revuelta, para que acudiese pacíficamente a Santo Domingo y acatase las órdenes del pesquisidor. En cuanto llegó a Santo Domingo fue encarcelado junto con sus hermanos y enviado con ellos a España a principios de octubre de 1500.12
Indulto real y confirmación como adelantado
El 25 de noviembre llegaron a la península, permaneciendo presos hasta que los reyes tuvieron conocimiento de ello y ordenaron su libertad y que se les hiciese entrega de dos mil ducados.12 El 17 de diciembre de 1500 se presentaron ante los Reyes Católicos en Granada y el almirante se echó a llorar, consolado por la reina, pero Bartolomé no lloró ni se arrodilló. Altanero les dijo que le habían hecho venir, que había perdido seis años de su vida pasando peligros y penalidades en el Nuevo Mundo, y que ahora que estaba todo hecho era vejado y deshonrado, por lo que si ya no se le necesitaba reclamaba que se le pagasen todos sus sueldos, que con ellos reharía su vida.13
Tras el indulto real, Bartolomé acompañó de nuevo a su hermano Cristóbal en el último de sus cuatro viajes (1502-1504). En 1506 se dirigió a Roma para solicitar el apoyo de la orden de los Jerónimos y el del propio papa Julio II, al que llevó una copia de la carta que su hermano le había escrito al rey Fernando en 1503 dándole cuenta de sus últimas exploraciones. La operación tuvo cierto éxito porque el papa le escribió al monarca aragonés y al cardenal Cisneros sendas cartas elogiosas con la familia Colón. Al cardenal, que por entonces era regente de Castilla, le exhortó a que respetase las capitulaciones y privilegios del nuevo almirante, Diego Colón.14
Al fallecer Pedro de Estopiñán el 3 de septiembre de 1505 antes de pasar al Nuevo Mundo, siendo el nominal segundo adelantado y quinto gobernador general de Indias, Nicolás de Ovando permaneció hasta 1509 como cuarto gobernador general y Bartolomé Colón seguiría utilizando el título de primer adelantado con confirmación real hasta su fallecimiento.15
Posesión de la isla de Mona y fallecimiento
En 1509 viajó de nuevo a las Antillas en compañía de su sobrino Diego, pero no tardó en retornar a Castilla en donde el regente del reino, el soberano Fernando II de Aragón, le confirmó la posesión de la isla de Mona, próxima a Puerto Rico.
Finalmente el adelantado Bartolomé Colón falleció el 11 de diciembre de 1514 en la ciudad de Concepción16 de la isla La Española, dejando como único heredero a su sobrino Diego Colón. Fue enterrado en el convento de San Francisco de Santo Domingo, primer monasterio que esta orden tuvo en la isla.16
La sepultura fue mencionada por el segundo almirante Diego Colón en su segundo testamento del 9 de septiembre de 1523. Diego Colón Muñiz apoderó a su tío Diego Colón junto al tesorero Sancho de Matienzo, para que tomaran posesión, en su nombre, de los bienes que dejó Bartolomé. Y así, el almirante le dirigió una carta a Matienzo en la cual dice:
[…] porque en Las Cuevas él (Bartolomé) tyene un arca, que en poder del Padre Don Gaspar está, çierta cantidad de dineros… asimismo porná vuestra merced por ynventario otras arcas que ay tyenen en poder del padre don Gaspar, todo lo que en ellas está, escripturas y cartas de marear, e una esfera grande y todo lo demás que oviere suyo, lo cual tenga todo el padre don Gaspar por memoria […] el arca que dicho tengo en que está el dicho dinero tyene dos llaves, la una está en poder del padre don Gaspar y la otra tyene un padre que se dice don fray Bartolomé Guerrero.
Actividad como cartógrafo
Bartolomé Colón debió dibujar numerosos mapas, según las fuentes contemporáneas. Hacia 1513 le envió al rey desde Santo Domingo «una carta y pintura de las Islas». También consta que Pietro Mártir vio un mapa comenzado por Cristóbal Colón y corregido por su hermano. No se conserva sin embargo ningún mapa firmado con su nombre. Se le han atribuido dos mapas manuscritos de la Española que muestran un gran número de iglesias y que se incluyeron en dos copias de las Décadas de Mártir, así como un mapa impreso de las Indias incluido en otros ejemplares de ese mismo libro;17 pero otros historiadores consideran ese mapa obra de Andrés Bernáldez.18
Durante un tiempo se le atribuyeron también a Bartolomé Colón tres esbozos de mapas de las tierras ecuatoriales conservados en el Códice Zorzi de la Biblioteca Nacional Central de Florencia.19 Son anotaciones dibujadas en los márgenes de una colección miscelánea de textos compilada por el veneciano Alessandro Zorzi. El códice incluye una informatione del viaje de Bartolomé Colón a Veragua y la carta escrita por Cristóbal Colón desde Jamaica.17
Zorzi escribió en la citada informatione que había comprado, a través de un religioso romano, «un dibujo de las costas de tales tierras» de la mano de Bartolomé. Ello llevó a historiadores como Wieser a suponer que se refería a los mapas dibujados en los márgenes del propio códice. Sin embargo, estos mapas son muy esquemáticos y representan regiones mucho más amplias que las costas de Veragua o Jamaica, además de utilizar algunos topónimos diferentes a los acuñados por Colón. Por ello, hoy día se considera que estos tres esbozos no fueron obra de Bartolomé Colón sino del propio Zorzi. No obstante, el texto de Zorzi confirma que Bartolomé Colón sí dibujo un mapa de algunas zonas del Caribe, hoy desaparecido.17
Códice Zorzi, mapa de las Indias occidentales antiguamente atribuido a Bartolomé Colón.

El primer mapa detallado de la isla de Santo Domingo

Mapa de la Española conservado en Bolonia, ca. 1516. Tamaño del original: 43 x 29,5 cm. Imagen cortesía de la web First Blacks of the Americas
¿Cómo era la isla de Santo Domingo justo después de la conquista española, a principios del siglo XVI? De las poquísimas imágenes que se conservan de aquella época, llama la atención un mapa bastante detallado que muestra los principales ríos y accidentes geográficos así como todas las poblaciones con iglesia cristiana.
El mapa no tiene fecha ni firma pero se ha atribuido a Bartolomé Colón, hermano del almirante Cristóbal Colón y primer gobernador (‘adelantado’) de la isla Española, antiguo nombre de Santo Domingo.
En realidad se trata de no uno sino dos mapas muy parecidos, ambos manuscritos. El más antiguo se encuentra inserto al final de un ejemplar de las Décadas del Nuevo Mundo de Pietro Martire d’Anghiera, obra publicada en 1511.
El otro mapa, dibujado sobre pergamino, está incluido en otro ejemplar de la misma obra pero de una edición posterior, de 1516. Este se encuentra en la Biblioteca Universitaria de Bolonia (Italia) y sí que se han publicado algunas imágenes. La imagen más nítida del original es la que abre esta entrada pero es difícil leer en ella los nombres de algunas poblaciones. Por suerte, en 1929 se publicó una monografía sobre este mapa acompañada de un facsímil en el que se aprecian los detalles con toda claridad; y esta obra está ahora disponible en Archive.org.
Tinkinswood
Tinkinswood
Tinkinswood o su nombre completo Tinkinswood Burial Chamber (galés: Siambr Gladdu Tinkinswood), también conocido como Castell Carreg, Llech-y-Filiast y Maes-y-Filiast,[2] es una cámara funeraria megalítica, construida alrededor de 6,000 BP (antes del presente), durante el período neolítico, en el valle de Glamorgan, cerca de Cardiff, Gales.
Cámara funeraria de Tinkinswood
Ubicación: Comunidades rurales de San Nicolás y Duffryn
Región: Vale of Glamorgan ( Bro Morgannwg ), Gales ( Gales : Cymru )
Coordenadas: 51 ° 27′4.96 ″ N 3 ° 18′29.17 ″ W
Períodos: Neolítico
Notas del sitio
La estructura se llama dolmen,[1] que era la estructura megalítica más común en Europa. El dolmen es del tipo de tumba de Severn-Cotswold,[2] [3] y consiste en una gran piedra angular en la parte superior, con piedras verticales más pequeñas que lo sostienen. La piedra caliza de Tinkinswood pesa aproximadamente 40 toneladas de largo y mide 24 pies (7,3 m) x 14 pies (4,3 m);[2] se cree que es el más grande de Gran Bretaña y también de Europa.[4] [5] Se necesitarían unas 200 personas para levantar la piedra en la posición correcta.[2] Originalmente estaba todo cubierto por un montículo de tierra, que se ha eliminado con el tiempo. El montículo restante detrás de la estructura mide aproximadamente 130 pies (40 m) x 59 pies (18 m) de tamaño.[2]
Historia

Dentro de la cámara funeraria con el capstone en la parte superior
Tinkinswood fue una vez una aldea, pero ahora todo lo que queda es la cámara funeraria, que se construyó alrededor de 6000 BP,[6] unos 1,000 años más o menos antes de que se construyera Stonehenge.[3] El sitio fue excavado en 1914,[2] [3] y dentro de la cámara había 920 huesos humanos, que estaban casi todos rotos. Esto demostró que al menos cuarenta personas de todas las edades y sexos fueron enterradas allí durante el período neolítico; parecería ser una cámara funeraria utilizada por todo el asentamiento.[2] Los cadáveres de los muertos probablemente quedaron expuestos antes de ser trasladados a la cámara funeraria. También se ha encontrado cerámica de estilo neolítico y campana de cristal, lo que demostró que la tumba de la cámara funeraria probablemente fue utilizada por una comunidad durante un largo período de tiempo, tal vez hasta el período temprano de la Edad del Bronce.[2] El trabajo de restauración se llevó a cabo al mismo tiempo, con un pilar de ladrillo construido para soportar la piedra angular.[2] [3]
Desde el sitio, dos líneas paralelas de piedras forman una avenida que se aleja de la cámara funeraria hacia el sureste. A lo largo de una segunda avenida hacia el noreste se encuentran muchas piedras. Una gran piedra individual se encuentra al este, y dos piedras planas paralelas apuntan a la cima de la cercana colina Coed Sion.[3]
El sitio es administrado por Cadw,[4] un organismo del gobierno galés responsable de la protección, conservación y promoción del patrimonio construido de Gales. En octubre de 2011, comenzaron nuevas excavaciones en el sitio.[7]
Mitos y leyendas
Muchos de los mitos y leyendas de Tinkinswood también están asociados con el cementerio cercano de St Lythans, a poca distancia. [5] La leyenda dice que cualquiera que pase una noche en Tinkinswood las tardes antes del Primero de Mayo, el Día de San Juan (23 de junio) o el Día del Medio Invierno moriría, se volvería loco o se convertiría en poeta.[2] Esta leyenda es similar a la leyenda general sobre las cimas de las montañas. Se dice que el grupo de cantos rodados al sudeste del monumento son mujeres que fueron convertidas en piedra para bailar en el día de reposo, otra leyenda asociada con los dólmenes.[5]








Impresión del sitio (no a escala) que mide aproximadamente 131 ‘(40m) por 59’ (18m).

Tinkinswood de noche (Foto: Ben Salter)

Charco embarrado en el interior del monumento (Foto: Ben Salter)
Pilar de ladrillos con la fecha de la excavación (Foto: Judy Davies)
También se llevaron a cabo obras de restauración en el momento en que se realizó la excavación de 1914, y se añadió además un pilar de ladrillo para asegurar un apoyo adecuado a la losa horizontal.
Erupción del monte Tambora
Erupción del monte Tambora 1815
El Monte Tambora es un volcán en la isla de Sumbawa en la actual Indonesia, entonces parte de las Indias Orientales Holandesas,[2] y su erupción de 1815 fue la erupción volcánica más poderosa de la historia humana registrada. Esta erupción con índice de explosividad volcánica (VEI) 7 expulsó de 37 a 45 km 3 (8,9 a 10,8 millas cúbicas) de material equivalente a roca densa (DRE) a la atmósfera,[3] y fue la erupción VEI-7 confirmada más reciente.[4]
1815 erupción del monte Tambora
Imagen en falso color del monte Tambora, tomada desde el transbordador espacial Endeavour el 13 de mayo de 1992; este en la cima.
Volcán: Monte Tambora
Fecha de inicio: 1812[1]
Fecha final: 15 de julio de 1815[1]
Ubicación: Sumbawa, Islas Menores de la Sonda, Indias Orientales Holandesas (ahora Indonesia) 8,25°S 118,00°E
Volumen: 37 a 45 km 3 (8,9 a 10,8 millas cúbicas)
Impacto
10.000 a 11.000 muertes por efectos volcánicos directos; 49.000 a 90.000 muertes por hambrunas y enfermedades epidémicas posteriores a la erupción en Sumbawa, Lombok y Bali; Reducción de las temperaturas globales en el año siguiente, lo que provocó hambrunas en numerosas regiones.
Aunque la erupción del monte Tambora alcanzó un clímax violento el 10 de abril de 1815,[5] durante los siguientes seis meses a tres años se produjeron un aumento de la formación de vapor y pequeñas erupciones freáticas. Las cenizas de la columna eruptiva se dispersaron por todo el mundo y redujeron las temperaturas globales en un evento conocido a veces como el Año sin verano en 1816.[6] Este breve período de cambio climático significativo provocó condiciones climáticas extremas y pérdidas de cosechas en muchas áreas del mundo. Varios forzamientos climáticos coincidieron e interactuaron de una manera sistemática que no se ha observado después de ninguna otra gran erupción volcánica desde principios de la Edad de Piedra.
Cronología de la erupción
Topografía actual de Sumbawa, el monte Tambora en el centro, la montaña más grande
Las regiones estimadas de caída de ceniza volcánica durante la erupción de 1815. Las áreas rojas muestran el espesor de la caída de ceniza volcánica. La región más exterior (1 cm (1 ⁄ 2 pulgadas) de espesor) llegaba a Borneo y Sulawesi.
El monte Tambora experimentó varios siglos de inactividad antes de 1815, causado por el enfriamiento gradual del magma hidratado en su cámara de magma cerrada.[7] Dentro de la cámara, a profundidades entre 1,5 y 4,5 km (5.000 y 15.000 pies), se formó la exsolución de un magma fluido a alta presión durante el enfriamiento y cristalización del magma. Se generó una sobrepresurización de la cámara de aproximadamente 4000 a 5000 bar (400 a 500 MPa; 58 000 a 73 000 psi), con una temperatura que oscilaba entre 700 y 850 ° C (1290 a 1560 ° F).[7] En 1812, el volcán comenzó a retumbar y generó una nube oscura.[8] El 5 de abril de 1815, se produjo una erupción gigante, seguida de estruendosos sonidos de detonación que se escucharon en Makassar en Sulawesi a 380 km (240 millas) de distancia, Batavia (ahora Yakarta) en Java a 1260 km (780 millas) de distancia, y Ternate en el Islas Molucas a 1.400 km (870 millas) de distancia. En la mañana del 6 de abril, comenzaron a caer cenizas volcánicas en Java Oriental y se produjeron débiles sonidos de detonación que duraron hasta el 10 de abril. Lo que al principio se pensó que era el sonido de disparos se escuchó el 10 de abril en Sumatra, a más de 2.600 kilómetros (1.600 millas) de distancia.[9]
Aproximadamente a las 19:00 horas del 10 de abril, las erupciones se intensificaron.[8] Tres columnas se elevaron y se fusionaron.[9]:249 Toda la montaña se convirtió en una masa fluida de “fuego líquido”.[9]:249 piedras pómez de hasta 20 cm (8 pulgadas) de diámetro comenzaron a llover alrededor de las 20:00, seguidas de ceniza alrededor de las 21:00-22:00. Los flujos piroclásticos cayeron en cascada  desde la montaña hasta el mar en todos los lados de la península, arrasando el pueblo de Tambora. Se escucharon fuertes explosiones hasta la noche siguiente, el 11 de abril. El velo de ceniza se extendió hasta Java Occidental y Sulawesi del Sur. En Batavia se notaba un olor a nitroso y cayeron fuertes lluvias teñidas de tefra, que finalmente amainaron entre el 11 y el 17 de abril.[8]
desde la montaña hasta el mar en todos los lados de la península, arrasando el pueblo de Tambora. Se escucharon fuertes explosiones hasta la noche siguiente, el 11 de abril. El velo de ceniza se extendió hasta Java Occidental y Sulawesi del Sur. En Batavia se notaba un olor a nitroso y cayeron fuertes lluvias teñidas de tefra, que finalmente amainaron entre el 11 y el 17 de abril.[8]
Las primeras explosiones se oyeron en esta isla la tarde del 5 de abril, se notaron en todos los barrios y continuaron a intervalos hasta el día siguiente. En un primer momento, el ruido se atribuyó casi universalmente a un cañón lejano; tanto es así, que un destacamento de tropas marchó desde Djocjocarta, creyendo que se estaba atacando un puesto vecino, y junto a la costa, en dos ocasiones se enviaron barcos en busca de un supuesto barco en peligro.
— Memorias de Sir Stamford Raffles [9] : 241
La explosión tuvo un VEI estimado de 7.[10] Se estima que se expulsaron 41 km3 (10 millas cúbicas) de traquiandesita piroclástica, con un peso aproximado de 10 mil millones de toneladas. Esto dejó una caldera que medía 6 a 7 kilómetros (3+1 ⁄ 2 – 4+1 ⁄ milla) de ancho y 600 a 700 m (2000 a 2300 pies) de profundidad.[8] La densidad de las cenizas caídas en Makassar fue de 636 kg/m 3 (39,7 lb/pie cúbico).[11] Antes de la explosión, la elevación máxima del monte Tambora era de unos 4.300 m (14.100 pies),[8] lo que lo convierte en uno de los picos más altos del archipiélago de Indonesia. Después de la explosión, su elevación máxima había caído a sólo 2.851 m (9.354 pies), aproximadamente dos tercios de su altura anterior.[12]
La erupción de Tambora de 1815 es la erupción más grande observada en la historia registrada, como se muestra en la siguiente tabla.[8][4] La explosión se escuchó a 2.600 km (1.600 millas) de distancia y la ceniza cayó al menos a 1.300 km (810 millas) de distancia.[8]
Secuelas
En mi viaje hacia la parte occidental de la isla pasé por casi todo Dompo y una parte considerable de Bima. Es impactante contemplar la extrema miseria a la que han sido reducidos los habitantes. Al borde del camino aún quedaban los restos de varios cadáveres y las huellas del lugar donde muchos otros habían sido enterrados: los pueblos casi completamente desiertos y las casas derrumbadas, los habitantes supervivientes se habían dispersado en busca de alimentos. … Desde la erupción, en Bima, Dompo y Sang’ir ha prevalecido una violenta diarrea que se ha llevado a un gran número de personas. Los nativos suponen que fue causado por beber agua impregnada de cenizas; y los caballos también han muerto, en gran número, a causa de una enfermedad similar.
—Teniente. Philips, ordenado por Sir Stamford Raffles para ir a Sumbawa.[9] 248–249
Toda la vegetación de la isla fue destruida. Los árboles arrancados de raíz, mezclados con ceniza de piedra pómez, fueron arrastrados al mar y formaron balsas de hasta cinco kilómetros (tres millas) de ancho.[8] Entre el 1 y el 3 de octubre, los barcos británicos Fairlie y James Sibbald encontraron extensas balsas de piedra pómez a unos 3.600 km (2.200 millas) al oeste de Tambora.[13] Nubes de espesas cenizas todavía cubrían la cumbre el 23 de abril. Las explosiones cesaron el 15 de julio, aunque se observaron emisiones de humo hasta el 23 de agosto. En agosto de 1819, cuatro años después del suceso, se registraron llamas y fuertes réplicas.
Un tsunami de tam año moderado azotó las costas de varias islas del archipiélago indonesio el 10 de abril, con una altura de hasta 4 m (13 pies) en Sanggar alrededor de las 22:00 horas.[8] Se informó de un tsunami de 1 a 2 m (3 a 7 pies) de altura en Besuki, Java Oriental, antes de la medianoche, y uno de 2 m (7 pies) de altura en las Islas Molucas. Se estima que el número total de muertos ronda los 4.600.[14]
año moderado azotó las costas de varias islas del archipiélago indonesio el 10 de abril, con una altura de hasta 4 m (13 pies) en Sanggar alrededor de las 22:00 horas.[8] Se informó de un tsunami de 1 a 2 m (3 a 7 pies) de altura en Besuki, Java Oriental, antes de la medianoche, y uno de 2 m (7 pies) de altura en las Islas Molucas. Se estima que el número total de muertos ronda los 4.600.[14]
Los cielos amarillos propios del verano de 1815 tuvieron un profundo impacto en las pinturas de JMW Turner
La columna de erupción alcanzó la estratosfera a una altitud de más de 43 km (141.000 pies).[4] Las partículas de ceniza más gruesas se asentaron una o dos semanas después de las erupciones, pero las partículas de ceniza más finas permanecieron en la atmósfera desde unos pocos meses hasta algunos años a altitudes de 10 a 30 km (33 000 a 98 000 pies).[8] Los vientos longitudinales esparcen estas finas partículas por todo el mundo, creando fenómenos ópticos. En Londres se observaron con frecuencia atardeceres y crepúsculos prolongados y de colores brillantes entre el 28 de junio y el 2 de julio de 1815 y el 3 de septiembre y el 7 de octubre de 1815. [8 ] El brillo del cielo crepuscular normalmente aparecía de color naranja o rojo cerca del horizonte y violeta o rosa arriba.
El número estimado de muertes varía según la fuente. Zollinger (1855) cifra el número de muertes directas en 10.000, probablemente causadas por flujos piroclásticos. En Sumbawa, 18.000 personas murieron de hambre o de enfermedades. Alrededor de 10.000 personas en Lombok murieron a causa de enfermedades y hambre.[15] Petroeschevsky (1949) estimó que unas 48.000 personas murieron en Sumbawa y 44.000 en Lombok.[16] Stothers en 1984 y varios otros autores han aceptado la afirmación de Petroeschevsky de 88.000 muertes en total.[8] Sin embargo, un artículo de 1998 escrito por J. Tanguy y otros afirmó que las cifras de Petroeschevsk y eran infundadas y estaban basadas en referencias imposibles de rastrear.[17] La revisión de Tanguy del número de muertos se basó en el trabajo de Zollinger en Sumbawa durante varios meses después de la erupción y en las notas de Thomas Raffles.[9] Tanguy señaló que pudo haber habido víctimas adicionales en Bali y Java Oriental debido al hambre y las enfermedades. Su estimación fue de 11.000 muertes por efectos volcánicos directos y 49.000 por hambrunas y enfermedades epidémicas posteriores a la erupción.[17] Oppenheimer escribió que hubo al menos 71.000 muertes en total.[4] Reid ha estimado que 100.000 personas en Sumbawa, Bali y otros lugares murieron por los efectos directos e indirectos de la erupción.[18]
y eran infundadas y estaban basadas en referencias imposibles de rastrear.[17] La revisión de Tanguy del número de muertos se basó en el trabajo de Zollinger en Sumbawa durante varios meses después de la erupción y en las notas de Thomas Raffles.[9] Tanguy señaló que pudo haber habido víctimas adicionales en Bali y Java Oriental debido al hambre y las enfermedades. Su estimación fue de 11.000 muertes por efectos volcánicos directos y 49.000 por hambrunas y enfermedades epidémicas posteriores a la erupción.[17] Oppenheimer escribió que hubo al menos 71.000 muertes en total.[4] Reid ha estimado que 100.000 personas en Sumbawa, Bali y otros lugares murieron por los efectos directos e indirectos de la erupción.[18]
Alteración de las temperaturas globales.
La erupción provocó un invierno volcánico. Durante el verano del hemisferio norte de 1816, las temperaturas globales se enfriaron 0,53 °C (0,95 °F). Este enfriamiento tan significativo provocó directa o indirectamente 90.000 muertes. La erupción del monte Tambora fue la causa más importante de esta anomalía climática.[19] Si bien hubo otras erupciones en 1815, Tambora está clasificada como una erupción VEI-7 con una columna de 45 km (148.000 pies) de altura, eclipsando a todas las demás en al menos un orden de magnitud.
El VEI se utiliza para cuantificar la cantidad de material expulsado, siendo un VEI-7 de 100 km 3 (24 millas cúbicas). Cada valor de índice por debajo de ese es un orden de magnitud (es decir, diez veces) menor. Además, la erupción de 1815 se produjo durante un Mínimo de Dalton, un período de radiación solar inusualmente baja.[20] El vulcanismo juega un papel importante en los cambios climáticos, tanto a nivel local como global. Esto no siempre se entendió y no entró en los círculos científicos como un hecho hasta que la erupción del Krakatoa en 1883 tiñó los cielos de naranja.[19]
La escala de la erupción volcánica determinará la importancia del impacto sobre el clima y otros procesos químicos, pero se medirá un cambio incluso en los entornos más locales. Cuando los volcanes entran en erupción, expulsan dióxido de carbono (CO2), agua, hidrógeno, dióxido de azufre (SO2), cloruro de hidrógeno, fluoruro de hidrógeno y muchos otros gases (Meronen et al. 2012). El CO 2 y el agua son gases de efecto invernadero, que representan el 0,0415 por ciento y el 0,4 por ciento de la atmósfera, respectivamente. Su pequeña proporción oculta su importante papel a la hora de atrapar la radiación solar y reirradiarla de regreso a la Tierra.
Efectos globales
Concentración de sulfato en núcleos de hielo del centro de Groenlandia, datada mediante el conteo de variaciones estacionales de isótopos de oxígeno: alrededor de la década de 1810 se produjo una erupción desconocida.[21]
La erupción de 1815 liberó SO2 a la estratosfera, provocando una anomalía climática global. Diferentes métodos han estimado la masa de azufre eyectada durante la erupción: el método petrológico; una medición óptica de la profundidad basada en observaciones anatómicas; y el método de concentración de sulfato de núcleos de hielo polar, utilizando núcleos de Groenlandia y la Antártida. Las cifras varían según el método, oscilando entre 10 y 120 millones de toneladas.[4]
En la primavera y el verano de 1815, se observó una “niebla seca” persistente en el noreste de Estados Unidos. La niebla enrojeció y oscureció la luz del sol, de modo que las manchas solares eran visibles a simple vista. Ni el viento ni la lluvia dispersaron la “niebla”. Fue identificado como un velo de aerosol de sulfato estratosférico.[4] En el verano de 1816, los países del hemisferio norte sufrieron condiciones climáticas extremas, denominadas el “Año sin verano“. Las temperaturas globales promedio disminuyeron entre 0,4 y 0,7 °C (0,7 a 1,3 °F),[8] lo suficiente como para causar importantes problemas agrícolas en todo el mundo. El 4 de junio de 1816, se informaron heladas en las elevaciones superiores de New Hampshire, Maine (entonces parte de Massachusetts), Vermont y el norte de Nueva York. El 6 de junio de 1816, nevó en Albany, Nueva York y Dennysville, Maine.[4] El 8 de junio de 1816, se informó que la capa de nieve en Cabot, Vermont, todavía tenía 46 cm (18 pulgadas) de profundidad.[22] Tales condiciones se produjeron durante al menos tres meses y arruinaron la mayoría de los cultivos agrícolas en América del Norte. Canadá experimentó un frío extremo durante ese verano. Nieve de 30 cm (12 pulgadas) de profundidad acumulada cerca de la ciudad de Quebec del 6 al 10 de junio de 1816.
El segundo año más frío en el hemisferio norte desde alrededor de 1400 fue 1816, y la década de 1810 es la década más fría registrada. Esa fue la consecuencia de la erupción del Tambora en 1815 y posiblemente de otra erupción del VEI-6 a finales de 1808. Las anomalías de la temperatura de la superficie durante el verano de 1816, 1817 y 1818 fueron −0,51 °C (−0,92 °F), −0,44 °C (−0,79 °F) y −0,29 °C (−0,52 °F), respectivamente.[10] Algunas partes de Europa también experimentaron un invierno más tormentoso.[cita necesaria]
Se ha atribuido a esta anomalía climática la gravedad de las epidemias de tifus en el sudeste de Europa y a lo largo del mar Mediterráneo oriental entre 1816 y 1819.[4] Los cambios climáticos perturbaron los monzones indios, provocaron tres cosechas fallidas y hambrunas, y contribuyeron a la propagación del tifus, una nueva cepa de cólera que se originó en Bengala en 1816.[23] Mucho ganado murió en Nueva Inglaterra durante el invierno de 1816-1817. Las temperaturas frescas y las fuertes lluvias provocaron cosechas fallidas en las Islas Británicas. Las familias de Gales viajaron largas distancias como refugiados, pidiendo comida. La hambruna prevaleció en el norte y suroeste de Irlanda, tras el fracaso de las cosechas de trigo, avena y patatas. La crisis fue grave en Alemania, donde los precios de los alimentos aumentaron bruscamente y en muchas ciudades europeas se produjeron manifestaciones frente a mercados de cereales y panaderías, seguidas de disturbios, incendios provocados y saqueos. Fue la peor hambruna del siglo XIX.[4]
Efectos del vulcanismo
El vulcanismo afecta a la atmósfera de dos maneras distintas: un enfriamiento a corto plazo causado por la insolación reflejada y un calentamiento a largo plazo debido al aumento de los niveles de CO2. La mayor parte del vapor de agua y del CO2 se acumula en las nubes en unas pocas semanas o meses porque ambos ya están presentes en grandes cantidades, por lo que los efectos son limitados.[24] Se ha sugerido que una erupción volcánica en 1809 también pudo haber contribuido a una reducción de las temperaturas globales.[21]
Impacto de la erupción
Según la mayoría de los cálculos, la erupción de Tambora fue al menos un orden de magnitud completo (10 veces) mayor que la del Monte Pinatubo en 1991 (Graft et al. 1993)[cita necesaria] Se estima que 1220 m (4000 pies) de la erupción La cima de la montaña se derrumbó para formar una caldera, reduciendo la altura de la cumbre en un tercio. Alrededor de 100 km3 (24 millas cúbicas) de roca fueron lanzados al aire (Williams 2012)[cita necesaria] También se bombearon gases tóxicos a la atmósfera, incluido azufre que causó infecciones pulmonares (Cole-Dai et al. 2009).[cita necesaria] La ceniza volcánica tenía más de 100 cm (40 pulgadas) de profundidad dentro de los 75 km (45 millas) de la erupción, mientras que las áreas dentro de un radio de 500 km (300 millas) vieron una caída de ceniza de 5 cm (2 pulgadas) y ceniza, se podía encontrar a una distancia de hasta 1.300 km (810 millas).[4] Las cenizas quemaron y sofocaron los cultivos, creando una escasez inmediata de alimentos en Indonesia. (Cole-Dai et al. 2009)[cita necesaria] La eyección de estos gases, especialmente cloruro de hidrógeno, provocó que la precipitación fuera extremadamente ácida, matando gran parte de los cultivos que sobrevivieron o rebrotaron durante la primavera. La escasez de alimentos se vio agravada por las guerras napoleónicas, las inundaciones y el cólera.[4] Su liberación de energía fue equivalente a aproximadamente 33 gigatoneladas de TNT (1,4 × 1020 J).[25]

Las cenizas en la atmósfera durante varios meses después de la erupción reflejaron cantidades significativas de radiación solar, lo que provocó veranos inusualmente fríos que contribuyeron a la escasez de alimentos.[4] China, Europa y América del Norte tuvieron temperaturas bien documentadas por debajo de lo normal, que devastaron sus cosechas. La temporada de monzones en China e India se alteró, provocando inundaciones en el valle del Yangtze y obligando a miles de chinos a huir de las zonas costeras. (Granados et al. 2012)[cita necesaria] Los gases también reflejaron parte de la radiación solar entrante ya disminuida, provocando una disminución de 0,4 a 0,7 °C (0,7 a 1,3 °F) en las temperaturas globales a lo largo de la década. Durante los veranos de 1816 y 1817 se formó una presa de hielo en Suiza, lo que le valió a 1816 el título de “Año sin verano”.[24] Los meses de invierno de 1816 no fueron muy diferentes de los de años anteriores, pero la primavera y el verano mantuvieron temperaturas frescas hasta heladas. El invierno de 1817, sin embargo, fue radicalmente diferente, con temperaturas inferiores a -34 °C (-30 °F) en el centro y norte de Nueva York, lo suficientemente frías como para congelar lagos y ríos que normalmente se utilizaban para transportar suministros. Tanto Europa como América del Norte sufrieron heladas que duraron hasta junio, con una acumulación de nieve de 32 cm (13 pulgadas) en agosto, que acabó con los cultivos recientemente plantados y paralizó la industria alimentaria. La duración de las temporadas de crecimiento en partes de Massachusetts y New Hampshire fue de menos de 80 días en 1816, lo que provocó pérdidas en las cosechas (Oppenheimer 2003). Se observaron puestas de sol visualmente únicas en Europa occidental y se observó niebla roja a lo largo de la costa este de los EE. UU. Estas condiciones atmosféricas únicas persistieron durante la mayor parte de 2,5 años (Robock 2000)[cita necesaria]
Los científicos han utilizado núcleos de hielo para monitorear los gases atmosféricos durante la década fría (1810-1819), y los resultados han sido desconcertantes. Las concentraciones de sulfato encontradas tanto en la estación Siple, en la Antártida como en el centro de Groenlandia rebotaron de 5,0[se necesita aclaración] en enero de 1816 a 1,1[se necesita aclaración] en agosto de 1818.[21] Esto significa que se expulsaron a la atmósfera entre 25 y 30 teragramos de azufre, la mayor parte de los cuales provino de Tambora, seguido de una rápida disminución a través de procesos naturales. Tambora provocó el mayor cambio en las concentraciones de azufre en los núcleos de hielo de los últimos 5.000 años. Las estimaciones del rendimiento de azufre varían de 10 teragramos (Black et al. 2012)[cita necesaria] a 120 teragramos (Stothers 2000)[cita necesaria] con un promedio de estimaciones de 25 a 30 teragramos. Las altas concentraciones de azufre podrían haber causado un calentamiento estratosférico de alrededor de 15 °C (27 °F) durante cuatro años, lo que resultó en un enfriamiento retardado de las temperaturas de la superficie que duró nueve años. (Cole-Dai et al. 2009) cita necesario] Esto ha sido denominado un “invierno volcánico“, similar a un invierno nuclear debido a la disminución general de las temperaturas y las pésimas condiciones agrícolas.[4]
Los datos climáticos han demostrado que la variación entre las mínimas y máximas diarias puede haber influido en la temperatura promedio más baja porque las fluctuaciones fueron mucho más moderadas. En general, las mañanas eran más cálidas debido a la nubosidad nocturna y las tardes eran más frescas porque las nubes se habían disipado. Hubo fluctuaciones documentadas en la cobertura de nubes en varios lugares, lo que sugería que se trataba de un suceso nocturno y que el sol las eliminaba, como si fuera una niebla.[4] Los límites de clase entre 1810 y 1830 sin años de perturbaciones volcánicas fueron de alrededor de 7,9 °C (14,2 °F). Por el contrario, los años de perturbación volcánica (1815-1817) tuvieron un cambio de sólo alrededor de 2,3 °C (4,1 °F). Esto significó que el ciclo anual medio en 1816 fue más lineal que en forma de campana y 1817 sufrió un enfriamiento en todos los ámbitos. El sureste de Inglaterra, el norte de Francia y los Países Bajos experimentaron la mayor cantidad de enfriamiento en Europa, seguidos por Nueva York, New Hampshire, Delaware y Rhode Island en América del Norte.[24] Las precipitaciones documentadas fueron hasta un 80 por ciento superiores a las normales calculadas con respecto a 1816, con cantidades inusualmente altas de nieve en Suiza, Francia, Alemania y Polonia. Esto contrasta nuevamente con las precipitaciones inusu almente bajas en 1818, que causaron sequías en la mayor parte de Europa y Asia. (Auchmann et al. 2012) [26] Rusia ya había experimentado veranos inusualmente cálidos y secos desde 1815 y esto continuó durante los siguientes tres años. También hay reducciones documentadas en la temperatura del océano cerca del Mar Báltico, el Mar del Norte y el Mar Mediterráneo. Esto parece haber sido un indicador de cambios en los patrones de circulación oceánica y posiblemente cambios en la dirección y velocidad del viento (Meronen et al. 2012)[cita necesaria]
almente bajas en 1818, que causaron sequías en la mayor parte de Europa y Asia. (Auchmann et al. 2012) [26] Rusia ya había experimentado veranos inusualmente cálidos y secos desde 1815 y esto continuó durante los siguientes tres años. También hay reducciones documentadas en la temperatura del océano cerca del Mar Báltico, el Mar del Norte y el Mar Mediterráneo. Esto parece haber sido un indicador de cambios en los patrones de circulación oceánica y posiblemente cambios en la dirección y velocidad del viento (Meronen et al. 2012)[cita necesaria]
Teniendo en cuenta el Mínimo de Dalton y la presencia de hambrunas y sequías anteriores a la erupción, la erupción de Tambora aceleró o exacerbó las condiciones climáticas extremas de 1815. Mientras que otras erupciones y otros eventos climatológicos habrían llevado a un enfriamiento global de aproximadamente 0,2 °C (0,4 °F), Tambora aumentó sustancialmente en ese punto de referencia.[21]
El incidente Tambora fue la erupción volcánica más prolongada del último milenio. Según el Índice de Explosividad Volcánica del Estudio Geológico de Estados Unidos, Tambora recibe una calificación de 7 en una escala de 8, y es del tipo Ultra Pliniana. Eso es diez veces más potente que la erupción del Monte Pinatubo en 1991, y cien veces mayor que el estallido del Monte Santa Helena en 1981.
La explosión del Tambora produjo una columna de fuego de más de 20 kilómetros de altura y se pudo escuchar a 2.000 kilómetros de distancia. Fue muy superior a la del Krakatoa, también en Indonesia, en la isla de Java, que ocurrió 60 años después.
Vista aérea del Volcán Tambora (Getty Images)
 Al principio, la bruma mortífera del Tambora creó ocasos extraños y espectaculares que inspiraron a los artistas del mundo entero, entre ellos el célebre paisajista inglés J. M. W. Turner (bien llamado el «pintor de la luz»), que lo plasmó en algunas de sus obras.
Al principio, la bruma mortífera del Tambora creó ocasos extraños y espectaculares que inspiraron a los artistas del mundo entero, entre ellos el célebre paisajista inglés J. M. W. Turner (bien llamado el «pintor de la luz»), que lo plasmó en algunas de sus obras.
M. W. Turner, Canal de Chichester (1828)
Kuhikugu
Kuhikugu
Kuhikugu es un sitio arqueológico ubicado en Brasil, en la cabecera del río Xingu, en la selva amazónica. El área alrededor de Kuhikugu se encuentra hoy en parte del Parque Nacional Xingu. Kuhikugu fue descubierto por primera vez por el antropólogo Michael Heckenberger, que trabajó junto con el pueblo local Kuikuro, que son probablemente descendientes de los habitantes originales de Kuhikugu.[1]
Mapa de Kuhikugu
Complejo arqueológico e historia.
En sentido amplio, el nombre se refiere a un complejo arqueológico que incluye veinte ciudades y pueblos, repartidos en un área de alrededor de 7.700 millas cuadradas (20.000 km2), donde alguna vez vivieron cerca de 50.000 personas. Kuhikugu probablemente estuvo habitado desde hace unos 1.500 años hasta hace tan solo 400 años, cuando las personas que vivían allí probablemente murieron a causa de enfermedades traídas por los europeos. Aunque es probable que los europeos no la transmitieran directamente a los habitantes de Kuhikugu, sí transmitieron enfermedades directamente a socios comerciales de otras áreas. Cuando los europeos llegaron a esta zona, la civilización ya se estaba desmoronando.[2] Los primeros conquistadores que exploraron esta área probablemente vieron los últimos momentos de estas ciudades, y sus registros brindan una idea de cómo habrían sido estos lugares. Y cuando los europeos regresaron algún tiempo después, las ciudades y pueblos ya estaban consumidos por la selva tropical. Los indígenas ahora vivían en tribus alejadas de las ruinas, y la memoria de esa civilización se recordaba a través de la tradición oral.
Lo que distingue a las personas que habrían habitado Kuhikugu de otras civilizaciones sudamericanas son sus monumentos horizontales. A diferencia de los pueblos aztecas y mayas que construyeron pirámides, estos pueblos construyeron largos monumentos en el suelo para sus dioses. Presumiblemente, esto se debe a que sería imposible mantener una pirámide grande en una selva tropical y quedaría eclipsada por los árboles circundantes. La ingeniería era lo suficientemente sofisticada para puentes que cruzaban grandes secciones de río y fosos con fines defensivos. Además, la tierra negra que rodea la zona indica actividad agrícola a gran escala[1] [3]
Asentamiento X11
Estrictamente hablando, Kuhikugu es el asentamiento X11 de este complejo, ubicado cerca de Porto dos Meinacos en la orilla oriental del lago Kuhikugu (ahora Lagoa Dourada) a 12°33′30″S 53°6′40″W. Allí, así como en otros antiguos asentamientos del complejo Kuhikugu, las imágenes de satélite revelan que aún hoy el bosque difiere de las áreas prístinas circundantes, y la exploración terrestre revela que esto es un efecto del antrosol (cf. terra preta), conocido al Kuikuro como egepe. Directamente al norte del sitio X11 hay una aldea Kuikuro, cuyo pequeño tamaño proporciona una comparación interesante con la gran área de egepe que indica el asentamiento prehistórico.[4]
Se construyeron grandes zanjas defensivas y empalizadas alrededor de algunas de las comunidades de Kuhikugu.[1] [4] También existen grandes plazas en algunas de las ciudades de la región, algunas de alrededor de 490 pies (150 m) de ancho.[1] [4] Muchas de las comunidades en Kuhikugu estaban conectadas, con caminos que unían algunos ríos a lo largo de sus caminos y con canales para canoas que corrían a lo largo de algunos de los caminos. Los sitios X35 y X34 son comunidades importantes conectadas por dos de estos caminos. El sitio X11 tiene un total de 4 suburbios que se conectan a través de un río o una carretera, y todos parecen tener una relación constante entre sí.[4]
Es posible que existieran campos de mandioca (yuca) alrededor de las comunidades de Kuhikugu, lo que sugiere que la gente allí eran agricultores.[4] [5] Las presas y estanques que parecen haber sido construidos en el área también sugieren que los habitantes de Kuhikugu pueden haber estado involucrados en la piscicultura, que todavía practican algunos de sus descendientes Kuikuro de hoy en día.
La ciudad perdida de Z
Existe la posibilidad de que las leyendas sobre Kuhikugu hayan convencido al explorador británico, el teniente coronel Percy Fawcett, de emprender su expedición a la “Ciudad Z“. Fawcett afirmó haber descubierto una gran cantidad de fragmentos de cerámica en el Amazonas mientras realizaba trabajo de campo, y los sitios de Kuhikugu podrían haber tenido potencialmente una gran cantidad de cerámica en la superficie. Hay más de 20 sitios que abarca Kuhikugu, cada uno de los cuales podría haber albergado a más de 5.000 personas, y la planificación urbana sofisticada y las estructuras restantes podrían haber sido lo que Fawcett estaba buscando. Todos los sitios siguen un diseño similar, lo que significa que cualquiera de los sitios podría haber influido en Fawcett para buscar la Ciudad Perdida de ‘Z’.[3]

source : http://www.sciences-faits-histoires.com/blog/archeologie/bresil-kuhikugu-ou-site-x11-la-cite-z.html
Kuhikugu, ciudad perdida de Amazonia
Actualmente se acepta que el Amazonas ha sido el hogar de civilizaciones urbanas comparables en tamaño a las ciudades medianas de Europa Occidental. En los años 90, Hecklenberger revivió el mito de las ciudades perdidas de la Amazonia al estudiar los sitios arqueológicos del Alto Xingu, Brasil, entre ellos el famoso X11: Kuhikugu (M. Hecklenberger, pour la science n°388, 2010).
Sin embargo, el Amazonas ha transmitido durante mucho tiempo en la imaginación occidental moderna el Eros de la naturaleza original, virgen e inocente, luchando contra los thanatos de la modernidad destructiva. Las tribus, a diferencia de otras civilizaciones del sur o de Mesoamérica, no dejaron ninguna construcción duradera allí. Durante mucho tiempo se redujeron a los primitivos pueblos cazadores-recolectores que vivían en la Edad de Piedra y se conformaban con lo que la naturaleza estaba dispuesta a darles. En 1982, Pierre Gourou, en su obra seminal «Tierras de Buena Esperanza», contrastó las altas densidades del Delta del Mekong con las muy bajas densidades de la cuenca del Orinoco. Justificó esto por la ausencia o el dominio de las «técnicas de enmarcado». ¿Cómo podemos entonces concebir civilizaciones amazónicas pasadas que sean diferentes de las actuales? Esta visión cambiará gradualmente a partir de la década de 1970. Los investigadores redescubrieron entonces los escritos de los primeros exploradores. Michael Heckenberger cita los relatos de Gaspar de Carvajal, quien escribió en 1542 que «más de 200 piraguas, cada una de las cuales transportaba de 20 a 30 indios y unos 40, surgieron de las islas amazónicas que él pensaba que estaban deshabitadas». Casi dos siglos más tarde, el brasileño Antonio Pires de Campos se aventura cerca del Río Tapajos, al oeste de Xingu, y también evoca muchos pueblos bien conectados entre sí por amplios caminos. Estas observaciones serán corroboradas por R. Carneiro y especialmente por M. Heckenberger, «El alto Xingu es la única zona de la Amazonia brasileña que muestra claramente la continuidad de la ocupación indígena desde la prehistoria hasta la actualidad». Hacia el 1400 d.C., si no antes, las aldeas prehistóricas habían alcanzado proporciones impresionantes (20 a 50 hectáreas). Esto los hace entre los más grandes en cualquier área de tierras bajas de América del Sur en tiempos prehistóricos. Comprendían una variedad de estructuras, incluyendo calzadas lineales a lo largo de los márgenes de los caminos principales, patios centrales y zanjas profundas. Sin duda, esto habría ido acompañado de estructuras sobre el terreno como empalizadas, puentes y puertas de entrada. Se estima que tales aldeas podrían albergar alrededor de mil personas y que más de diez mil indios probablemente vivían al oeste del río Culuene en la región del alto Xingu. (povos indigenas brasil). Heckenberger cartografiará con la precisión de un agrimensor zanjas amplias y profundas y caminos anchos como las actuales autopistas, empalizadas que protegen pueblos, territorios explotados más o menos intensamente, numerosos pueblos unidos entre sí por una red de caminos muy sofisticada. Luego toma conciencia de un alto grado de integración regional. Los espacios ocupados se organizaron sobre cerca de 250 km², incluyendo 50 km² para conjuntos urbanos en el sentido estricto del término. Más recientemente, las excavaciones llevadas a cabo por el equipo anglo-brasileño de Jonas Gregorio de Souza revelarán un continuo de ciudades interconectadas de la civilización arahuaca en más de 400.000 km².
«Al mismo tiempo, regiones como la del sudoeste de la Amazonia albergaban una de las mayores diversidades de familias lingüísticas de la Amazonia, y la naturaleza multiétnica/multilingüística de los sistemas regionales queda ejemplificada por el Alto Xingu34». Se ha formulado la hipótesis de que el cinturón de arahuacos y otros grupos a lo largo del SRA constituye un sistema formativo suprarregional que estuvo presente desde finales de la época precolombina. De ser cierto, esta conexión sugeriría una distribución ininterrumpida de los movimientos de tierra a lo largo de 1800 Km. de este a oeste en el SRA y un impacto humano precolombino más intenso en los bosques de esta región que el anteriormente postulado «Los constructores de tierra precolombinos se asentaron a lo largo de todo el borde sur del Amazonas».
Se trata de una visión que demuestra la imposibilidad para las civilizaciones amazónicas de desarrollar intercambios complejos entre ellas y de cultivar intensamente un terruño amazónico latinoamericano y estable que se encuentra en estado puro. Lo que se considera en el mejor de los casos como «bons sauvages» es un modelo para la salvaguarda del planeta, ¿lo sigue siendo?
Hecklenberger compara en efecto las ciudades del Alto Xingu con las ciudades-jardín que podrían ser el modelo más conciliador de urbanización duradera y de protección de la biodiversidad. Pero las reservas indias parecen ser muy frágiles en cuanto a la deforestación amazónica, la soja OGM y las tierras extensas.
(Este texto está ampliamente basado en el artículo de M. Hecklenberger en la revista Pour la science n°388, 2010)


La civilización Kuhikugu
En 2008, la prestigiosa revista científica Scientific American publicó un artículo redactado por David Biello (editor asociado) bajo el título Antigua amazonía realmente altamente Urbanizada, en la cual resumía las investigaciones del antropólogo Michael Heckenberger —publicadas, a su vez, en Science— en donde exponía las conclusiones de años de investigación que demostraban que en el estado brasileño de Mato Grosso, especialmente en proximidades del Alto Xingú , se habrían descubierto 28 «ciudades», pueblos y aldeas que habrían sostenido una población de unas 50.000 personas.
No se trataba de «Z», ni de templos y viviendas de piedra, sino de espacios urbanos donde lógicamente se había aprovechado al máximo los recursos naturales del lugar: árboles y tierra.
Lo hallado fueron evidencias de zanjas, circulares en la mayoría de los casos, cuadrangulares en otros, de unos tres metros que supieron tener de profundidad y diez de ancho, redescubiertas porque la lamentable deforestación habría dejado al descubierto, observable en ocasiones desde aeronaves y en otras desde tierra, de las evidencias de esas construcciones. Estamos ante grandes conglomerados sedentarios, construidos entre el año 400 y 1.400 de nuestra era, rodeados por esas zanjas y empalizadas de madera.
A su vez, estos pueblos estaban comunicados entre sí por canales navegables, rectilíneos, donde canoas llevaban y traían mercaderías (volveremos enseguida sobre este detalle), y caminos que cortaban la selva también de manera rectilínea. De estos «caminos» supe ver evidencias en lo profundo del Paraguay hace ya años, y me comentaban los lugareños que «los antiguos» procedían de la siguiente forma: talaban la selva en sentido y ancho de donde querían establecer la vía de comunicación. Dado que la vegetación, en esas latitudes, tarda pocas semanas en hacer desaparecer todo vestigio de haber sido destazada en algún momento, lo que hacía era sembrar, en esos espacios despejados, un tipo de pastizal llamado «paja brava», que crece hasta unos 50 o 60 centímetros de altura. Grueso, áspero, literalmente mata todo brote, toda extensión de la vegetación selvática que tratara de ganar el espacio anterior, con lo cual décadas y hasta siglos después era posible seguir observando evidencias de donde pasaban estas «carreteras en la selva».

La «cultura Kuhikugu» (nombre que se ha dado a este todavía tan poco conocido horizonte cultural tomando el nombre de los relatos orales de los «kuikuros», etnia local que ya merecerá toda nuestra atención, y que se consideran herederos de esos ancestrales pobladores) compartía la particularidad que todas las aldeas y ciudadelas tenían una carretera principal que corría de noreste a suroeste a lo largo del eje del Solsticio de Verano y se disponían a un promedio de cinco kilómetros unas de otras. Y, finalmente, se supone que desaparecieron sus habitantes exterminados por las enfermedades que se extendieron por el subcontinente más rápidamente que los feroces y salvajes conquistadores, al punto que luego la selva recuperó sus espacios naturales.
Estos espacios descritos quizás no serán suficientes, a ojos del lector crítico, para justificar el sueño de Fawcett; sin embargo, es apenas la parte emergente de una trama muy cerrada y extensa de historias civilizatorias sobre las que apenas —acudo a la metáfora blavatskyana— estamos levantando un extremo de velo.
Porque si nos dirigimos un poco más al oeste, más precisamente en buena parte del estado de Beni en Bolivia y algo de Rondónia en Brasil, encontramos los llamados «Llanos de Mojos». Los «Moxos» (o los «Musus», como los encontramos denominados en escritos ya del siglo XVI) son asiento de otro misterio ya conocido de más antaño pero hasta ahora desconsiderado: las «lomas». ¿Qué son las mismas? Pues montículos absolutamente artificiales. Muchos, de tierra acarreada y apisonada; otros muchos, de ladrillos y bloques de adobe cubiertos de tierra. ¿Dimensiones?: algunos, los más grandes, llegan a los 20 metros de altura, por cien o ciento cincuenta metros de lado. Más aún: sobre esas plataformas en muchos casos se levantan terrazas, muros, empalizadas y verdaderas pirámides truncadas. ¿Ubicación?: unos 20 cerca de la ciudad de Trinidad; unos 380 alrededor de la población llamada Casarabe (llamada así porque entre fines del siglo XVIII y principios del XIX comenzaron a radicarse muchos inmigrantes de origen libanés y sirio, con lo cual se le llamaba coloquialmente la «casa árabe», que devino en el toponímico de referencia), y en toda la región mencionada… ¡se estiman unos 20.000!
En un interesantísimo estudio disponible en Internet, bajo el título A la sombra de los Andes. Arquitectura monumental en los Llanos de Mojos, los arqueólogos Carla Jaimes Betancourt y Heiko Prümers desarrollan un completo estudio sobre estos «montículos», señalando, muy acertadamente, que si estuvieran en Perú serían reconocidos como «huacas» o «pirámides truncadas» (esto, para contrarrestar la tendencia descalificadora con que la mirada de los lugareños —y también las autoridades zonales— contemplan estas ruinas). Pero además de su revalorización, estos profesionales ilustran sobre aspectos apasionantes. En efecto, aquí también tenemos Caminos Elevados, terraplenados, que comunican entre sí los montículos.
Ahora bien; en temporada de lluvias, toda esta enorme extensión —que cubriría dos veces la superficie de Suiza— se inunda. Los montículos, entonces, emergen como «islas» en el mar, siempre comunicados por los caminos elevados. Esa concepción visual, de sitios culturales unidos por caminos artificiales en medio de un enorme lago poco profundo, ¿a dónde nos remite?
A la Huey Tenochtitlán, con sus «chinampas» o islas artificiales, y los pueblos aledaños (hoy, absorbidos por el crecimiento de la urbe) como Xochimilco o Tlatelolco.
Los Llanos de los Mojos quedaban en el camino, desde tiempos ancestrales, del «Gran Paititi», el reinado extraño que ya los conquistadores supieron buscar por esas latitudes. En Santa Cruz encontramos Samaipata, a la que algunos estudios le adjudican autoría a los poco conocidos Mojocoyas, y que yo creo la avanzada occidental de la civilización de Kuhikugu. Que, por cierto, no es la Kuhikugu decadente de las aldeas con empalizadas descritas párrafos antes: la «civilización de los Mojos» surge alrededor del 500 a.C, extendiéndose, según algunos autores, hasta el 1.000 d.C.
Interesante fenómeno: tomando ambos horizontes señalados, cuanto más atrás vamos en el tiempo más avanzada es la cultura.
De modo que tenemos esta cultura, que tanta sintonía tiene con ciertas particularidades mexicas, por remota que esta última parezca. Es más; se ha descubierto que junto a los caminos terraplenados y elevados discurrían canales por donde, en tiempos de sequía, sin duda grandes canoas continuaban llevando y trayendo mercaderías (además de servir de administrador de sistemas de riesgo). Insisto: esta descripción visual es absolutamente coincidente con lo que los «nahuas» habrían hecho en esos mismos tiempos en el Ánahuac, el México prehispánico.
Y aquí comienza a asomar un «secreto tolteca» anticipado en el título: en Rondónia y Mato Grosso —y esto ya lo señala Fawcett— existía una etnia (literalmente exterminada, aunque algunos descendientes se hayan mestizado completamente) que se llamaban a sí mismo «nahuas».
Recordemos que los «nahuas» han sido la etnia troncal de donde salen distintos «horizontes culturales» o pueblos, que conocemos como zapotecas, olmecas, totonacas, mixtecas, otomíes, etc y etc., en el Ánahuac prehispánico. Ánahuac que, justamente, significa «tierra de nahuas».
Que una «tribu» en el Amazonas se identifique con el mismo nombre, cuando menos, llama poderosamente la atención. Pero aún debemos señalar que todos estos pueblos amazónicos tenían dialectos y lenguas de origen Arawak. Es Fawcett quien, por esta correspondencia lingüística, supone que los «arawaks» (que hemos conocido como «caribes», los «araucas», los «araucanos» del sur de Chile y los «antis» de Perú (de donde surge el toponímico «Andes») pertenecen a la misma raza original.
Hoy sabemos que los «caribes» se extendieron por Sudamérica, dando origen a ramas como los Tupíes, los Tapuyas y los Carijós. De hecho, los Tupíes originan los guaraníes, de presencia dominante en el escenario sudamericano precolombino.
Fuertes en el NE brasileño, se supone que cierta rama de los caribes es responsable de lo que hoy conocemos como «Stonehenge del Solsticio de Verano»: una extraña construcción megalítica en cercanías de Rego Grande, en el estado de Amapá, donde un conjunto de moles de granito de autores desconocidos y formas extrañas que remiten a reminiscencias lovecraftianas desconcierta a propios y extraños. Se le llama de esa particular forma porque en una de las rocas existe un orificio por donde, en el solsticio de verano, atraviesa el sol a mediodía creando un círculo sobre otra piedra a alguna distancia.


Por ciertos restos hallados al pie de estos monolitos (fuegos, quizás rituales, encendidos en los puntos donde fueron instalados) se estima su erección aproximadamente en el 3.000 a.C. Sin duda no tiene relación con la cultura Kuhikugu por su antigüedad, pero demuestra que a lo largo y a lo ancho de lo que hoy llamamos Brasil hubo numerosos pueblos, aún desconocidos, en un período temporal dilatadísimo.
En la desembocadura del Amazonas sobre el Atlántico se encuentra (ya la mencionamos) la Isla de Marajó. En la misma se han encontrado «montículos» en un todo afines a los de los Llanos de los Mojos, aunque si se mira un mapa llama la atención la enorme distancia entre un área y otra. Empero, la identidad de construcciones da a suponer que de alguna manera —quizás ocupando el río Amazonas como vía de comunicación— grupos que se influyeron mutuamente migraron por ese conducto.
Del río Amazonas, mientras tanto, hay un par de cosas que debemos comentar. Por ejemplo, que su nombre autóctono original no era, obviamente, el de Amazonas, sino «Solimoes», y es aquí donde Fawcett se pregunta si en ese nombre no vemos la presencia del nombre de Salomón, y lo vincula con las famosas «minas» de donde fluía el oro y la plasta que este rey hebreo, especulando si, quizás, no habrían navegado en tiempos remotos a través del Atlántico y, por este río, llegado a casi sus fuentes en territorio peruano donde el oro y la plata —especialmente la segunda— abunda.
Sabemos que se le llamó «amazonas» por las historias de mujeres guerreras que vivirían en sus márgenes. Pues bien, sépase que las mismas efectivamente existieron y no se trata de un fábula de los conquistadores. Estas mujeres eran llamadas «Aikembenanas» por los otros pueblos y ya es una certeza etnográfica su existencia.
El secreto tolteca
Si bien Fawcett no había dedicado años a explorar las culturas antiguas del México prehispánico, es un hecho —sencillo de demostrar— que cuando menos, en teoría, lo había estudiado profundamente. No solamente se trata aquí de esa hilación de conocidos y amigos que pudieron hacerle llegar hallazgos de Maler y otros, voy a citar algunas referencias no menores.

Por ejemplo, en su libro ya citado, al hablar de los Toltecas los llama «sabios artistas». Puede parecer un detalle menor, y no lo es: aún hoy, son (somos) un número reducido los que conocemos algo del idioma náhuatl original donde la palabra tolteca se traduce, efectivamente, como «sabio artista»; mucho menos común hubiera sido ese conocimiento a fines del siglo XIX o principios del XX salvo que se esté profundamente empapado de estudios sobre el particular.
Fawcett con
struye su propia teoría. Según la misma, en tiempos remotísimos lo que hoy llamamos Brasil era apenas una de varias islas que ocupaban el Hemisferio Sur. Grandes cataclismos hicieron que el océano se hundiera en ciertos puntos y se elevara en otros (no podemos obviar aquí ver la influencia teosófica, con la presencia intensa de Mu y Lemuria). Tierras que emergieron se habrían fusionado con esa «isla» y formó lo que hoy conocemos como Sudamérica. Al mismo tiempo, otra isla se hundía en el Atlántico. Atlántida. De la misma escapa una casta de sabios artistas, sacerdotes y educadores, los primitivos toltecas —Fawcett mismo dice que emplea ese término a falta de uno mejor— quienes luego de permanecer durante siglos en México extendieron su influencia hacia el Sur. Aislados los grupos (si por guerras, hambrunas, cataclismos; vaya a saberse) un grupo de toltecas «degenerados» se transforma en los «caribes» que conocemos como tales.
Permítaseme hacer aquí una digresión: hace años señalé que hubo una corriente civilizatoria que se inició en la Atlántida y, cruzado a través de décadas hacia Occidente y Oriente, cruzó el Atlántico y llegó a América, siguiendo a un líder (o las enseñanzas y directivas de ese líder) que habría pasado a la historia y la leyenda con el nombre de «Kar», «K’ar» o «K’a’r’» (según las pronunciaciones). Señalé en su momento el «rastro toponímico» que dejaba su nombre a través de la geográfica, y en esa ocasión algunos críticos me atacaron diciendo que se trataba de una tontería pues, según ese razonamiento, una «car-nicería» indicaría el paso de Kar por allí. Sin embargo, no necesito discutir mucho: todos ustedes saben que muchísimos toponímicos se crean usando como raíz adjetivos calificativos del lugar y nombres propios. El pensamiento de Fawcett, entonces, ratifica ésta mi teoría.
Bien, sigamos. El explorador señala en su libro esa presencia «nahua» ya mencionada en proximidades del Alto Xingú. Cerca, también, se encuentra otro grupo cultural, los «Maxubis», con quienes conviviera un tiempo, llamándole poderosamente la atención el ritual de, todos los amaneceres, formar toda la aldea mirando al naciente Sol, elevar sus manos en esa dirección y cantar al unísono un himno de salutación al mismo (costumbre que se encontraba hasta épocas muy recientes entre los mexicas). Estos «toltecas», incluso y siempre según la mirada de Fawcett, habrían llegado a ser los fundadores de Tiwanaku.
Podría decirse que era una teoría demasiado simplista ese «difusionismo excesivo» que proponía el inglés. Por cierto, llega a señalar que veía como posible que una rama de los Tupíes hubiera migrado a través del Pacífico hasta la Polinesia, ocupando en el camino Rapa Nui (Isla de Pascua).
Puede parecer excesivamente simplista este «difusionismo», pero en puridad no podría negarse puntualmente el extraordinario parecido que tienen las tallas en madera de los «fueguinos» (en puridad, los selk’nam, onas y yámanas) con los moais de la Isla de Pascua. Puede verse como exagerado ese difusionismo. Pero quien, como un servidor, ha tenido la oportunidad de estar frente a los moais y contemplar directamente las tallas onas conservadas en museos, no puede negar su extraordinario parecido.
Permitan ustedes que yo agregue, a las ideas de Fawcett, un elemento menor pero sugestivo. He hablado ya de los «kuikuros», el grupo tribal (hoy, de unos 500 individuos) que en los Altos del Xingú son los herederos (dicen serlo) de la cultura Kuhgikugu. Muchos de ellos ya están integrados a la civilización occidental, y de los que permanecen viviendo en sus aldeas originales supongo lo hacen por la interesante conveniencia del turismo. Con un altísimo cociente intelectual uniformemente distribuido entre ellos (es hasta simpático verles totalmente inmersos en su ambiente folklórico… pero sin dejar de revisar —algunos, claro— periódicamente sus celulares, aceptando sin ambagues que cuidar sus raíces no va en detrimento de estar enterados de lo que pasa en el mundo vía redes sociales), una de sus costumbres es conservar vestimentas rituales que emplean en ceremonias ancestrales. En ese ajuar se ocupan sólo cuatro colores: negro, rojo, amarillo y blanco. Los cuatro colores, precisamente, que identifican desde siempre a los «cuatro rumbos» del pensamiento mexica, a las nahui mitl, las «cuatro flechas» simbólicas. Son los colores de los «rezos» que se cuelgan ceremonialmente en el «Árbol de Rezos», los colores de las «cuatro puertas» de la ceremonia del Temazcal Guerrero…
Terremoto de Kangding-Luding
Terremoto de Kangding-Luding de 1786
El 1 de junio de 1786 se produjo un terremoto en Kangding y sus alrededores, en lo que hoy es la provincia china de Sichuan. Tuvo una magnitud estimada de aproximadamente 7,75 y una intensidad máxima percibida de X (extrema) en la escala de intensidad de Mercalli. El terremoto inicial mató a 435 personas. Después de una réplica diez días después, otras 100.000 personas murieron cuando se derrumbó una presa a lo largo del río Dadu.
Terremoto de Kangding-Luding de 1786
Fecha local: 1 de junio de 1786
Hora local: Mediodía [1]
Magnitud: 7,75 Mw [1]
Profundidad: 20 kilómetros (12 millas) [2]
Epicentro: 29,9°N 102,0°E
Zonas afectadas: Sichuan, dinastía Qing China
Máx. intensidad: X ( Extremo )
Derrumbes: Muchos
Damnificados: 435 por el terremoto y unos 100.000 por la rotura de la presa del deslizamiento de tierra
Entorno tectónico
Sichuan se encuentra dentro de la compleja zona de deformación asociada con la colisión continua entre la Placa India y la Placa Euroasiática . La corteza engrosada de la meseta tibetana se está extendiendo hacia el este provocando el movimiento hacia el sur del bloque Sichuan-Yunnan. El lado este de este bloque está delimitado por el sistema de fallas Xianshuihe , una importante zona de falla de rumbo lateral izquierdo. El movimiento en esta zona de falla ha sido responsable de muchos terremotos dañinos importantes,[3] como el terremoto de Dawu de 1981.[4]
Terremoto
Un mapa isosísmico construido para este terremoto muestra que la zona de máxima sacudida se alargó en dirección noroeste-sureste, paralela a la traza de la falla de Xianshuihe. La magnitud de 7,5 a 8,0 se ha estimado a partir de la extensión de la zona de intensidad VIII (severa). Las técnicas de detección remota, respaldadas por un estudio de campo, identificaron una zona de ruptura de falla superficial de 70 kilómetros (43 millas) de largo que se cree que está asociada con el terremoto. El segmento de falla activo ha sido identificado como falla de Moxi.[2]
Presa de deslizamiento de tierra
El terremoto provocó numerosos deslizamientos de tierra, uno de los cuales bloqueó el río Dadu, formando un lago temporal. La presa tenía unos 70 metros (230 pies) de altura y retenía un volumen de agua estimado en unos 50.000.000 de metros cúbicos (65.000.000 de yardas cúbicas). El 9 de junio, el lago había comenzado a fluir sobre la presa y una réplica el 10 de junio provocó que la presa colapsara repentinamente, liberando el agua represada y devastando áreas río abajo.[2] Es el segundo desastre por deslizamiento de tierra más mortífero registrado, después del terremoto de Haiyuan de 1920.[5]
Daño
El terremoto causó daños generalizados en la zona epicentral. Las murallas de la ciudad de Kangding se derrumbaron y los graves daños sufridos por muchas casas y edificios gubernamentales provocaron 250 víctimas. En el condado de Luding, 181 personas murieron en edificios derrumbados. Tanto en Qingxi como en Yuexi, partes de las murallas de la ciudad fueron destruidas y muchos edificios sufrieron graves daños, lo que provocó más víctimas.[1]
La inundación resultante del colapso de la presa llegó a la ciudad de Leshan el 11 de junio y provocó el colapso de parte de las murallas de la ciudad. Los espectadores que se habían reunido para observar la inundación desde los muros fueron arrojados al agua. Los efectos destructivos de la inundación continuaron río abajo en Yibin y Luzhou, y se estima que murieron en total 100.000 personas. Los residentes locales hicieron una placa conmemorativa que describe estos acontecimientos y que ahora se conserva en la Oficina Sismológica de Luding.[2]

Debe estar conectado para enviar un comentario.